


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Spin waves and transverse domain walls driven by spin waves: Role of damping
Cite this Article
Zhao Zi-Xiang, He Peng-Bin, Cai Meng-Qiu, Li Zai-Dong. Spin waves and transverse domain walls driven by spin waves: Role of damping. Chinese Physics B, 2020, 29(7): 077502 
Permissions
Spin waves and transverse domain walls driven by spin waves: Role of damping
† Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant Nos. 61774001 and 51972103), the Natural Science Foundation of Hebei Province of China (Grant No. F2019202141), and the Fund of the State Key Laboratory of Quantum Optics and Quantum Optics Devices, Shanxi University, China (Grant No. KF201906).
Abstract
Based on the uniform, helical and spiral domain-wall magnetic configurations, the excited spin waves are studied with emphasis on the role of damping. We find that the damping closes the gap of dispersion, and greatly influences the dispersion in the long-wave region for the spin waves of spiral wall and helical structure. For the uniform configuration, the Dzyaloshinskii–Moriya interaction determines the modification of dispersion by the damping. Furthermore, we investigate the interaction between spin waves and a moving spiral domain wall. In the presence of damping, the amplitude of spin wave can increase after running across the wall for small wave numbers. Driving by the spin waves, the wall propagates towards the spin-wave source with an increasing velocity. Unlike the case without damping, the relation between the wall velocity and the spin-wave frequency depends on the position of wall.
1. Introduction
Spin waves are linear excitations on top of the stable magnetic configurations, including uniform or nonuniform ones. Magnetic domain walls are nonlinear topological excitations connecting two domains with different magnetization directions. The interplay between them has drawn much attention from the fundamental point since 1960s.[1] The research revives recent years under the background of spintronics. Roughly, the investigations have two aspects: the influences of domain walls on spin waves, and the reverse. The former includes spin-wave spectra of domain walls,[1–5] emitting of spin waves from a dynamic domain wall,[6–10] refraction and reflection of spin waves on domain walls,[11–15] phase shift of spin wave across a domain wall,[16–18] and domain-wall waveguides of spin waves,[19,20] etc. On the other hand, spin waves can drive domain walls or excite solitons by exchanging the angular momentum and linear momentum,[21–28] by the resonance between spin waves and internal modes of walls,[29–32] and by the interference of spin waves.[33]
To understand the dynamics of domain walls driven by spin waves, the collective-coordinate method is a good choice, which can get the key physical features with qualitative clarity. There exist transfers of momentum and angular momentum between the magnon currents and the domain walls. Similar to the spin-transfer effects generated the spin-polarized current, the spin-wave-related driven terms can be introduced into the dynamic equations of collective coordinates.[23,34] Furthermore, the spin-wave excitations can also be involved into the Landau–Lifshitz–Gilbert (LLG) equation as driving terms. The dynamic equations about the collective coordinates of domain walls can be derived directly through perturbative expansion about the amplitude of spin waves.[6,35]
In previous studies, the influences of damping, on both the spin waves and the domain walls driven by spin waves, are often neglected or not fully considered, especially in the analytic calculations. For example, in Refs. [23,34], only the influence of damping on the moving domain wall is considered, whereas the effect on the spin waves is ignored. In Ref. [35], the damped spin waves are included, while the influence of the spin-wave attenuation on the domain-wall velocity is neglected.
In this paper, considering a ferromagnetic film with a bulk Dzyaloshinskii–Moriya interaction (DMI) and an in-plane uniaxial magnetic anisotropy, we investigate the dispersion and attenuation of spin waves on top of the uniform, spiral domain-wall, and helical magnetic configurations. Then, the dynamics of a transverse domain wall driven by spin waves is studied by the collective coordinates method. During the analysis, the role of damping is emphasized.
2. Model and static magnetic configurations



Assuming uniform magnetization within the cross section of a magnetic nanowire, a one-dimensional model is employed along the z-axis, as shown in Fig.


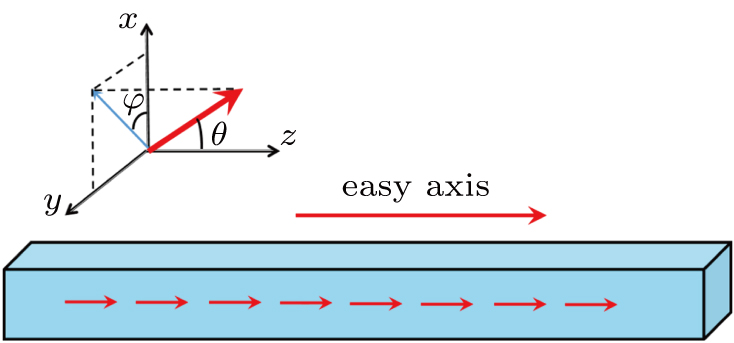 | Fig. 1. Model and coordinates system. |
In order to solving the static equation 


3. Spin waves excited on static configurations
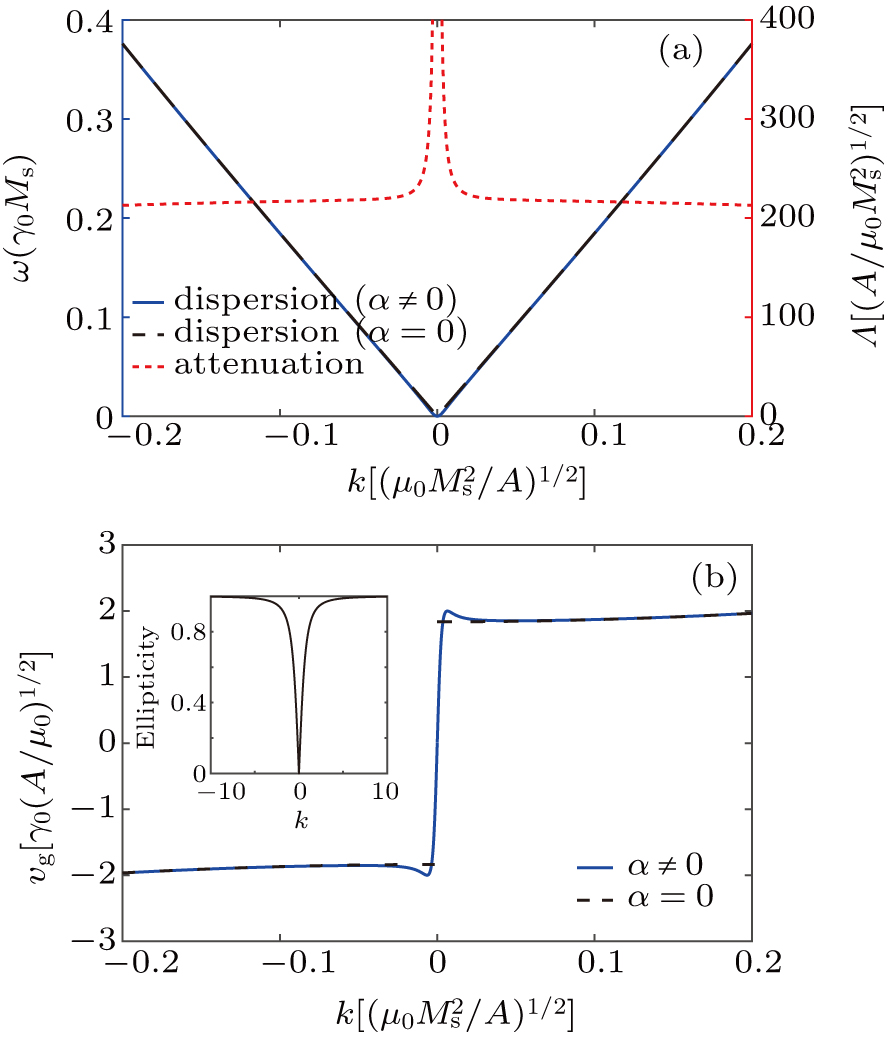
3.1. Spin waves of uniform configuration2 , the frequency, attenuation length, and group velocity versus the wave number k are illustrated for λ = 1. It can be found that the damping greatly changes the dispersion relation around k = –λ d, as shown in Fig. 2(a) . In the absence of damping, the dispersion relation is parabolic, ω = 2 [(k + λ d)2 + κ – d2], which can be obtained by taking α → 0 in Eq. (7 ). Meanwhile, a gap exists at k = – λ d without the damping. In addition, in this region, the group velocity is sharply increased in the presence of damping, as shown in Fig. 2(b) . When k approaches –λ d from the right (left) along the axis, the group velocity reaches vmax(– vmax) with 

For the uniform configuration, θ0 = 0 or π. In the linear regime, the spin wave is described by a small fluctuation that leads to m = λ ez + u(z,t) ex + v(z,t) ey, with λ = ± 1. Inserting this ansatz into Eq. (


In general, the attenuation length must be positive and decrease with the damping increasing. Namely, Λ > 0 and ∂ Λ/∂ α < 0. Under these conditions, the dispersion relation can be obtained as follows:

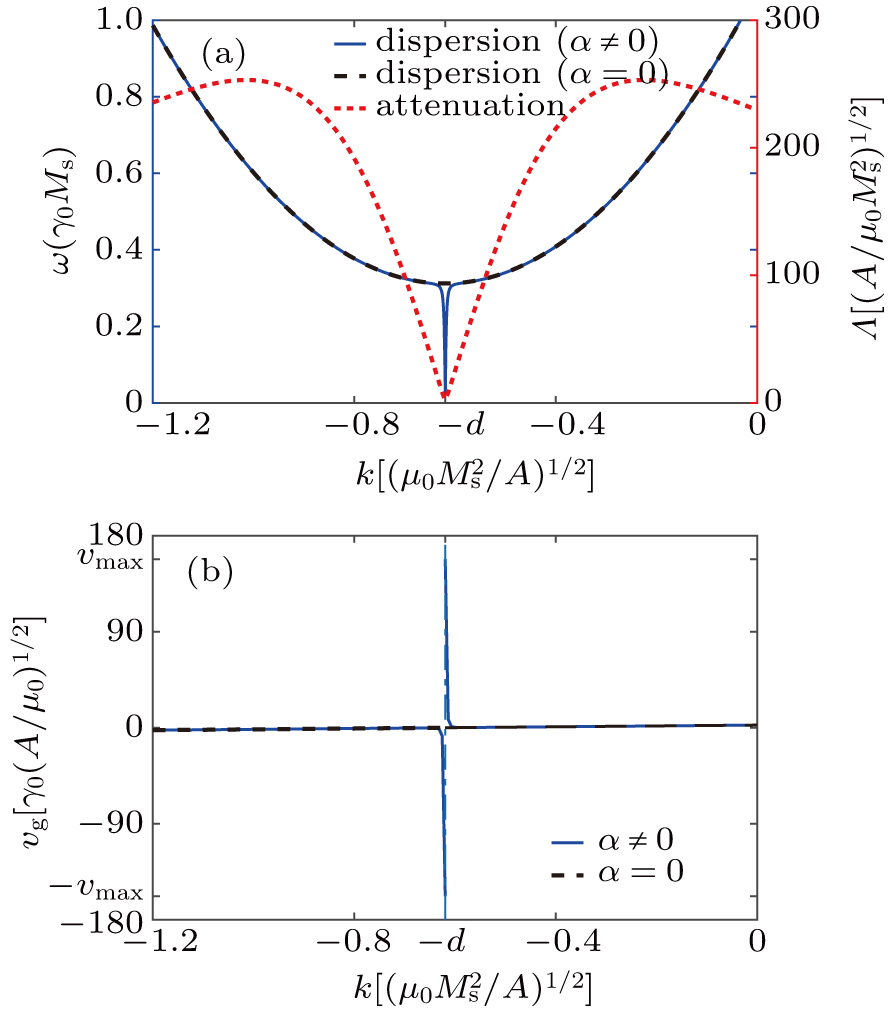 | Fig. 2. (a) Dispersion and attenuation of the spin wave excited on top of uniform configuration (θ0 = 0). The solid curve represents the dispersion relation with damping, while the dashed curve without damping. The dotted curve denotes the attenuation length as a function of wave number. (b) Group velocity. The solid and dashed curves correspond to the cases with and without damping, respectively. Here we take typical magnetic parameters: the Gilbert damping α = 0.01, the exchange constant A = 8.78 × 10–12 J/m, the saturation magnetization Ms = 3.84 × 105 A/m, the anisotropy constant K = 105 J/m3, the DMI constant D = 1.58 × 10–3 J/m2. From these parameters, the dimensionless anisotropy and DMI constants are     |
There is an intuitive physical picture which can explain the gapped spectrum for α = 0 and gapless one for α ≠ 0. For ease of interpretation, we neglect the DMI firstly and the bottom of spectrum is at k = 0. Without damping, if there is no anisotropy, the system is rotational symmetric. According to the Nambu–Goldstone theorem, the spin wave is gapless and a massless mode exists. Here k = 0 means that all spins are uniformly twisted. If rotating all spin uniformly, the total exchange energy is unchanged. Thus, no energy is costed when exciting this Goldstone mode. Including the magnetic anisotropy, to rotate every spin uniformly, there exists an energy cost to overcome the anisotropy. Therefore, a gap opens and is measured by the anisotropy parameter 2 κ. Restoring the dimension, the gap is μ0 HK Ms with HK = 2K/Ms being the anisotropy field. This is just the work done by the anisotropy field.
In the presence of damping, there exists a massless mode (zero mode) expressed as

Now, let us analyze the role of DMI which has two features: exchange and anisotropy. This can be observed by rewrite the energy density Eq. (


Finally, when the Gilbert parameter α increases, the width of the peak in Fig.
3.2. Spin waves of spiral domain wall
7 )) apart from a translation of λ d along the k axis. In the long-wave limit (k → 0), the dispersion is greatly reshaped by the damping and the gap is closed. Meanwhile, the attenuation length approaches the wall width parameter Δ.
In the domain-wall region, the magnetization is nonuniform. It is convenient to take a rotating reference frame attached on the magnetization of domain wall with the unit vectors er = m0 = sin θ0 cos φ0 ex + sin θ0 sin φ0 ey + cos θ0 ez. Here θ0 and φ0 take the Walker profile expressed by Eqs. (







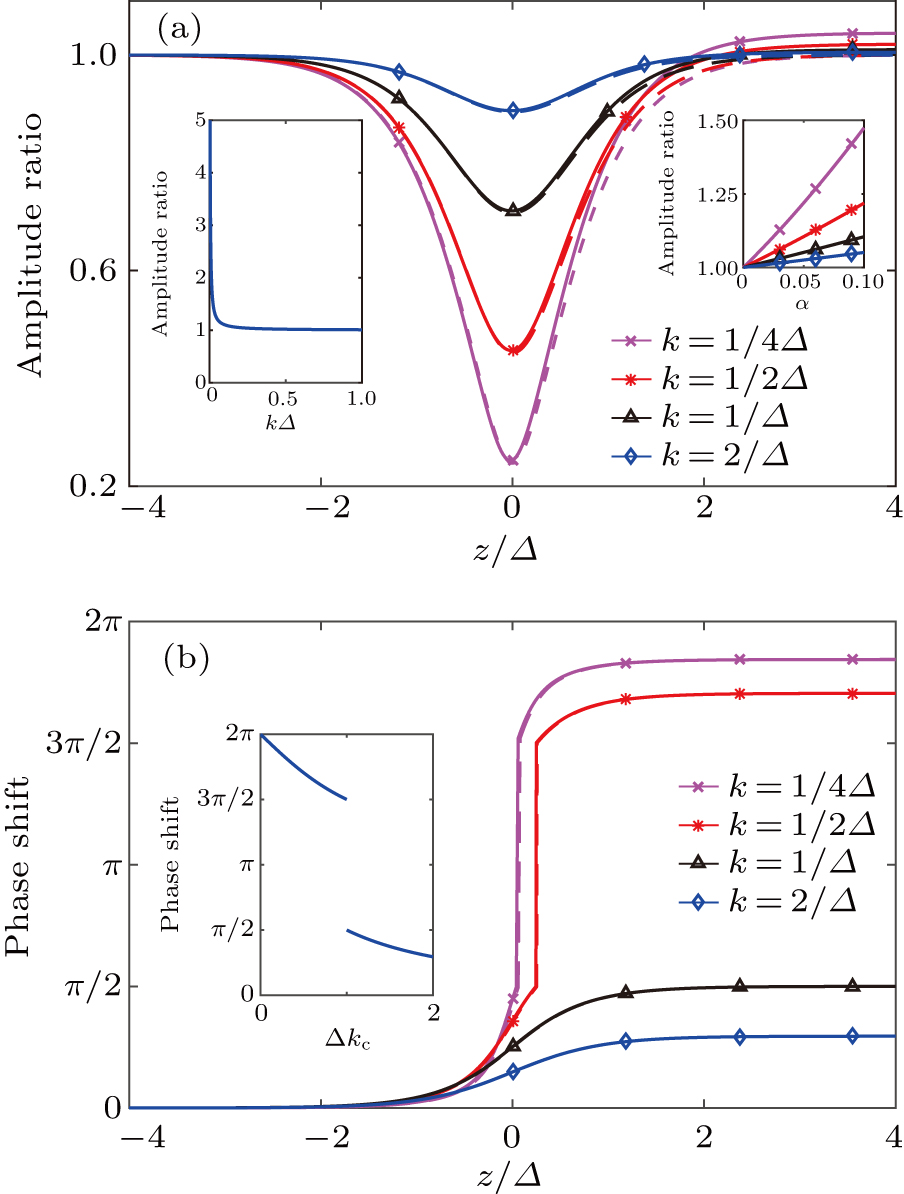
Going through the domain wall, the amplitude of spin wave changes, which is attributed to the Pöschl–Teller potential and the attenuation. Figure 
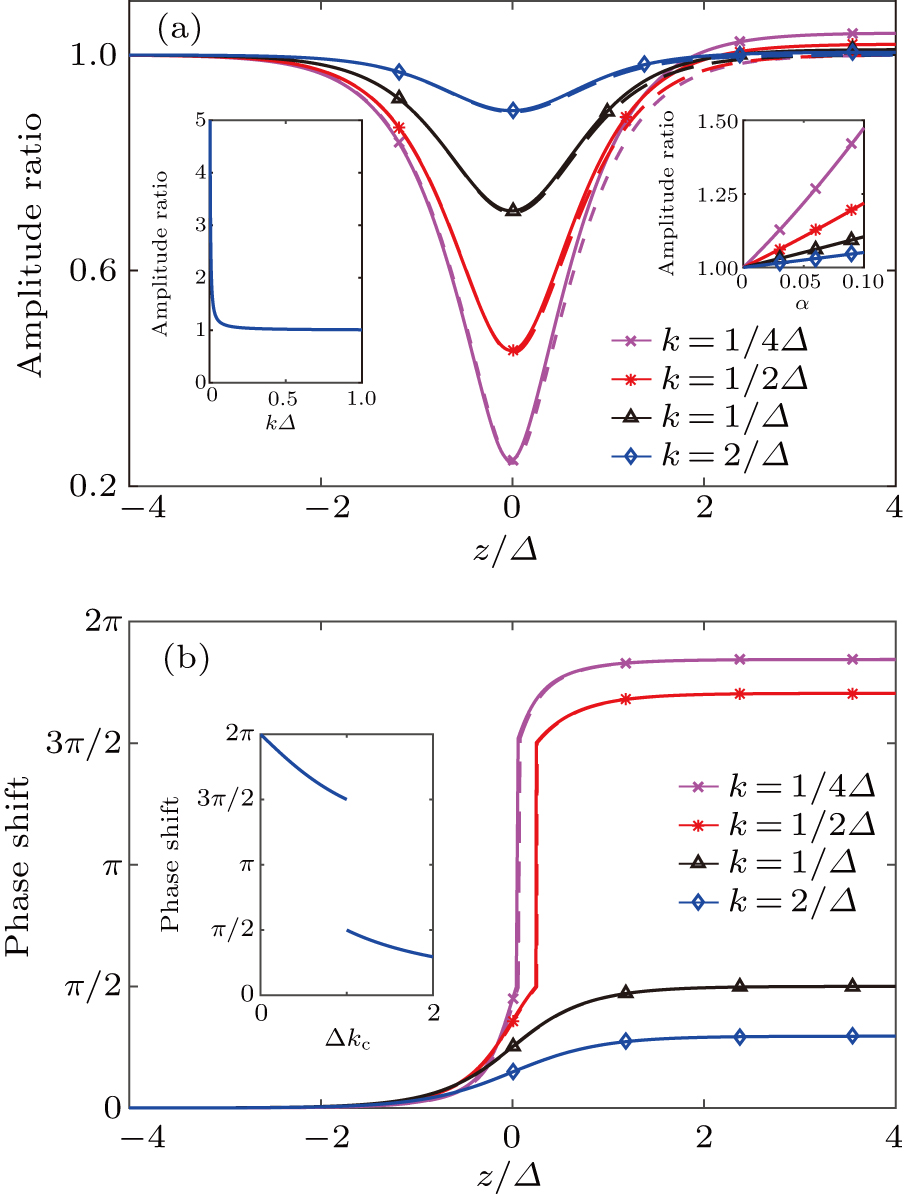 | Fig. 3. The amplitude ratio (a) and phase shift (b) of spin wave along the domain wall for different wave numbers. The solid lines correspond to the case of α = 0.01, and the dashed lines to α = 0. The insets show the total amplitude ratio and phase shift across the domain wall. The rest parameters are the same as those in Fig.  |
Taking the domain-wall width as πΔ,[45] the attenuation contributes a factor exp(– πΔ/Λ) to the amplitude ratio. Hence, the amplitude changes approximately by a factor of 

Additionally, the phase also changes with the spin wave passing across the domain wall, as shown in Fig. 
3.3. Spin waves of helical structure4(a) , there is no gap for the dispersion with and without damping. This can be understood by the Nambu–Goldstone theorem. For strong DMI, there exists a breaking of axis symmetry and the ground state is one of the degenerate ones, φ0 = d z + φ, where φ could be arbitrary. When one of the degenerate ground state is chosen, there should be a corresponding Goldstone mode.
4(b) , in the long-wave limit (k → 0), ρu/ρv → 0, the spin wave is linear polarized. In the short-wave region, ρu/ρv → 1, the spin wave is circular polarized.
For strong DMI, d2 > κ, there exists a static helical structure, which is described by θ0 = ± π/2, and φ0 = d z + ϕ. Adopting the rotating reference frame attached on the helical magnetization with er = m0, the linear spin wave is expressed as m = m0 + u eθ + v eφ. Inserting this ansatz into Eq. (



 | Fig. 4. (a) Dispersion and attenuation of spin wave excited on top of helical configuration. The solid curve represents the dispersion relation with damping, while the dashed curve without damping. The dotted curve denotes the attenuation length as a function of wave number. (b) Group velocity. The solid and dashed curves correspond to the cases with and without damping, respectively. The inset in (b) shows the dependence of ρu/ρv on k. Here the same parameters are used as those in Fig. |
Unlike the spin wave excited on top of uniform configuration, the attenuation length is very large in the long-wave region. Without damping, the dispersion relation is 

In contrast with the spin waves excited on top of the uniform and domain-wall configurations, an elliptic spin wave is excited on the helical configuration. The ellipticity (defined as ρu/ρv) varies with the wave number,

4. Dynamic domain wall driven by spin waves11 ) and (12 ) into the LLG equation (2 ) and keeping the terms up to the second order of the amplitude ρ, we get the dynamic equations about q and ϕ as follows:
A .


Based on the static spiral profile (Eqs. (



Up to the order of ρ2, the dynamic equations of q and ϕ can be simplified to




Taking the initial position q0 = qs + 100 Δ, we plot the variation of domain-wall velocity with its position for different wave numbers in Fig.
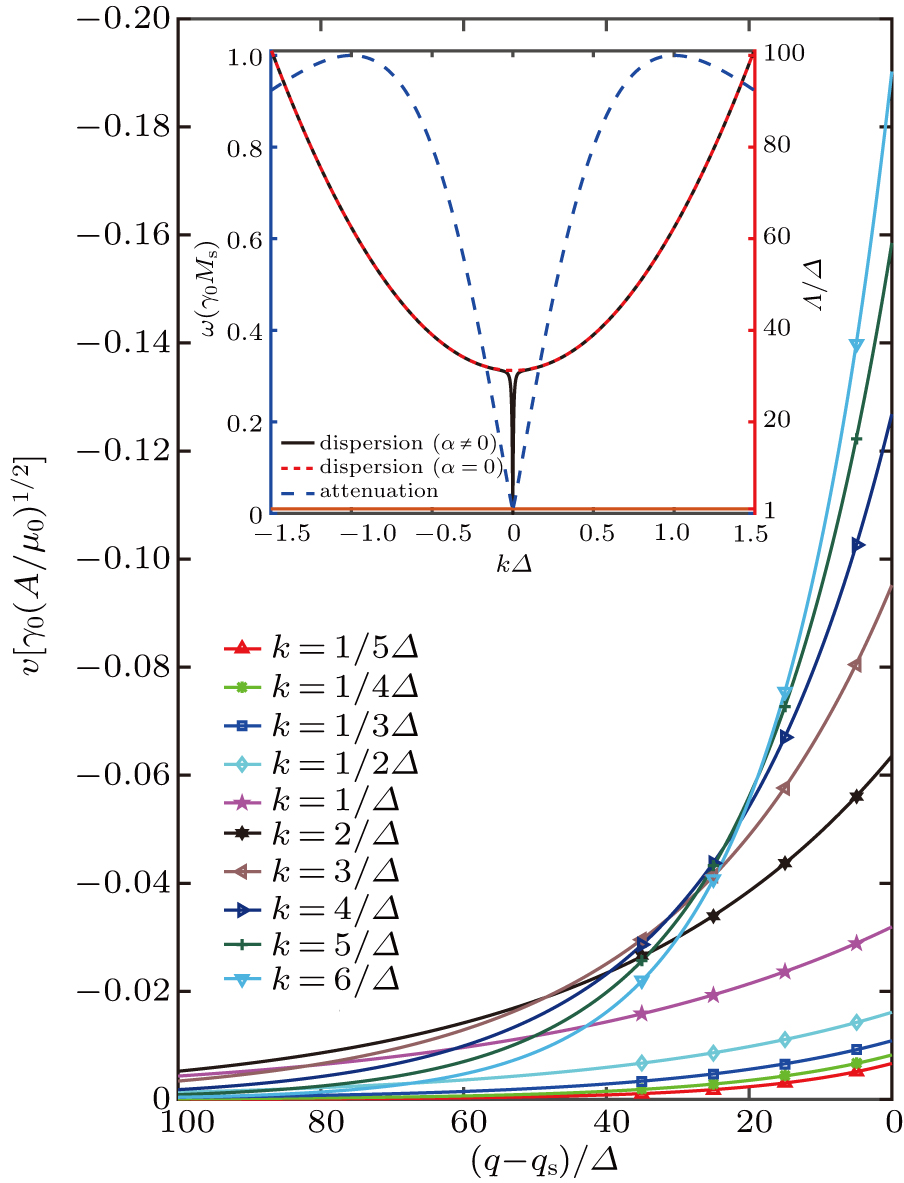 | Fig. 5. Dependence of velocity of domain wall on its distance from the source of spin wave for different wave numbers. The inset shows the dispersion relations with and without damping, as well as the dependence of attenuation length on the wave number. Here the Gilbert damping constant α = 0.01. The amplitude parameter ρ = 0.2. The rest parameters are the same as those in Fig.  |
Up to the order of ρ4, there is no simple analytic expression for velocity. The dynamic equation of q and its numeric solution are placed in Appendix
There are two aspects of the influences of damping on the spin wave. Firstly, the dispersion is greatly moderated in the long-wave region (k → 0), as shown in the inset of Fig. 

In the presence of damping, the velocity of domain wall depends on the wave number (frequency) of spin wave more complexly. Due to the attenuation of spin wave, apart from the function 
5. Conclusions
We have investigated the spin waves excited on top of uniform, spiral domain-wall and helical magnetic configurations in the film with an in-plane magnetic anisotropy and a bulk DMI. We put emphasis on the role of damping. For the spin wave of uniform configuration, the dispersion is greatly modified by the damping around k = – λ D/(2A) and the gap is closed. The group velocity becomes very large with a maximum 
The effect of spin waves on the moving spiral domain wall is also studied by the collective-coordinate method. We find that driven by a spin wave the velocity of domain wall is not a constant in the presence of damping. The domain wall moves towards the source of spin wave and the velocity increases. Considering the attenuation of spin wave, the relation between the wall velocity and the wave number of spin wave depends on the position of wall.
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] | |
| [21] | |
| [22] | |
| [23] | |
| [24] | |
| [25] | |
| [26] | |
| [27] | |
| [28] | |
| [29] | |
| [30] | |
| [31] | |
| [32] | |
| [33] | |
| [34] | |
| [35] | |
| [36] | |
| [37] | |
| [38] | |
| [39] | |
| [40] | |
| [41] | |
| [42] | |
| [43] | |
| [44] | |
| [45] |