






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Mask-based denoising scheme for ghost imaging
Cite this Article
Zhou Yang, Guo Shu-Xu, Zhong Fei, Zhang Tian. Mask-based denoising scheme for ghost imaging. Chinese Physics B, 2019, 28(8): 084204 
Permissions
Mask-based denoising scheme for ghost imaging
† Corresponding author. E-mail:
Abstract
Ghost imaging (GI) is thought of as a promising imaging method in many areas. However, the main drawback of GI is the huge measurement data and low signal-to-noise ratio. In this paper, we propose a novel mask-based denoising scheme to improve the reconstruction quality of GI. We first design a mask through the maximum between-class variance (OTSU) method and construct the measurement matrix with speckle patterns. Then, the correlated noise in GI can be effectively suppressed by employing the mask. From the simulation and experimental results, we can conclude that our method has the ability to improve the imaging quality compared with traditional GI method.
1. Introduction
In recent years, ghost imaging (GI) has attracted considerable attention due to its ability to reconstruct an unknown object through spatial intensity correlation measurements from tow detectors. Unlike the traditional imaging methods, one of the detectors without spatial resolution is needed in ghost imaging to contain the object information. The other detector with spatial resolution is employed to detect the light source. Quantum ghost imaging was first theoretically introduced by Klyshko and demonstrated experimentally by Pittman[1,2] in 1995. Afterwards, it was discovered that pseudo-thermal light sources[3–5] and thermal light sources[6] can be exploited to achieve GI. Now, researchers are working towards the progress from pure theory to real-world applications.
Recent research has revealed that GI has received increasing attention due to its novel physical characteristics, such as non-lens imaging, atmospheric turbulence free, etc.[7–10] These studies demonstrated that GI is a very powerful tool for imaging objects in optically harsh fields such as lidar detection, three-dimensional (3D) imaging, biomedical imaging, etc.[11–23] Unfortunately, the limitation of signal-to-noise ratio (SNR) and resolution are an obstacle for GI to use pseudo-thermal light, which is difficult to meet practical application requirements. Therefore, improving GI image quality with fewer measurements is the crucial problem to be resolved. In order to address this issue, many novel reconstruction methods have been proposed.[24–35] In Ref. [24], the normalized ghost imaging (NGI) with a more appropriate weighting factor is applied to the ensemble average of the estimated object, and has a similar performance to the differential ghost imaging (DGI).[25] Besides, the iterative denoising of ghost imaging (IDGI)[26–28] shows a remarkable enhancement in terms of reconstruction quality by estimating the noise terms via the conventional GI algorithm. However, the IDGI relies on the quality of the original GI reconstruction image. Comparing with the above methods, the reconstruction quality of compressive-sensing ghost imaging (CGI)[29–32] shows significant improvement and lower measurements than Nyquist sampling limit. However, it may rely on the prior character of the object, and the optimization procedure itself is time-consuming and memory-wasting. Though pseudo-inverse GI (PGI)[33,34] is likely to enhance the visibility and spatial resolution of GI with respect to the property of the pseudo-inverse matrix, it cannot acquire the robust images in practical engineering applications. Instead of optimizing the speckle pattern, scalar-matrix-structured[35] GI demonstrates a robust reconstruction image. However, this method lacks universality in practical applications and does not give a method of constructing an effective scalar matrix either.
In this paper, a mask-based denoising ghost imaging (MDGI) method is proposed, which aims to remove the correlated noise in GI and improving the quality of the reconstructed image. This method has better imaging quality than DGI and NGI. Compared with IDGI, it does not depend on the quality of the original GI methods. Compared with the SMGI method, an effective construction method of the new measurement matrix is given. Firstly, we theoretically analyze the reason why the SNR of DGI and NGI are both higher than that of GI. Then, we use the OTSU[36] method to calculate the optimal threshold corresponding to the correlated noise in GI. Finally, the mask is obtained by combining the calculated optimal threshold with that from a dilation method, and it is used to further reduce the correlated noise in GI. From simulations and experimental results, we can conclude that our method can effectively remove the correlated noise in GI and improve the imaging quality index compared with GI, DGI and NGI method.
2. Principle and methods
where x represents the transverse spatial coordinate,


denotes the total light intensity collected by bucket detector with i-th measurement;

, and N denotes the total number of measurements;

refers to the reference light intensity distributions collected by CCD in i-th measurement. The covariance of the light field at the x and

point is defined as
Equation (1 ) can thus be expressed as
where
M denotes the total number of pixels of the object, and

represents autocorrelation coefficient.

can be considered as a noise term in GI. Then DGI can be expressed as[26]
Here,
.
where

,
,

, and
. When measurements are enough,

. Therefore,
Consequently, equation (1 ) can be expressed as follows:
where

, T represents the transmission coefficient of the original object and is an

column vector, and

. In addition, I denotes an

column vector whose elements are all 1 and

denotes the average of each column of A and is an 1×M row vector. Since matrix A is not an orthogonal matrix, the utilization of information is low. Under the condition of

, the covariance matrix cov(A) will approach to a diagonal matrix. This is the fundamental reason for the improvement of imaging SNR. In order to reduce the number of measurements and improve SNR, we construct a mask with OTSU method to remove the correlated noise from the covariance matrix cov(A). Setting Φ = cov(A),normalizing matrix

by Eq. (9 ) can be expressed as follows:
where μ denotes the average value of the matrix Φnorm and g is the variance between classes. Let K represent the number of elements of the matrix Φnorm, then K = M×M. The number of the parts less than t is K0 and the average value of the corresponding elements is μ0, the number of other parts is K1 and the average value is μ1, and K = K0+K1. Moreover,

and

. Through Eqs. (11 ) and (12 ), the between-class variance g can be expressed as
When the between-class variance g is maximum, we can obtain the optimal threshold tm. Therefore, our method can be defined as
where

(

denotes the point multiplication operation between matrices

and

) and matrix

represents the pseudo-inverse operation of

. It should be noted that in our method

is replaced by Anew (
) compared with traditional GI method in Eq. (8 ). In addition, both mask

and matrix Anew can be obtained through the idle reference detector measurements in engineering applications.
where

denotes the Minkowski addition and

is the reflection of the disk-shaped structuring element

with a radius of r. In other words, it is the set of element locations z, where the reflected structuring element overlaps with foreground elements in

when translated to z.
where
The best value 1 is achieved if and only if

, for all

. The lowest value of -1 occurs only when

. However, the Q value is generally not less than 0. The peak signal-to-noise ratio (PSNR) is defined as
A schematic of the ghost imaging is shown in Fig.
 |
 |
 |
 |
 |
 | Fig. 1. Schematic diagram of MDGI with pseudo thermal light. (a) Schematic diagram of ghost imaging with pseudo thermal light. Inside the red dotted line on the left side of the schematics is pseudo-thermal light source. BS: beam splitter; D1: bucket detector without spatial resolution; D2: reference detector with spatial resolution; L: lens; Z1: distance between light source and object; Z2: distance between light source and reference detector; PC: personal computer. (b) Schematic diagram of mask-based denoising scheme. Inside the blue dotted line on the schematic is mask 
|
Moreover, the reconstructed object 
 |
 |
We can conclude from this analysis that the covariance 



The speckle field of the i-th measurement is reshaped as a row vector 
 |
 |
 |
Here, Φmax is the maximum value of the matrix Φ. Simultaneously, we need to set a valid threshold tm to separate Φnorm into two parts as given below.
 |
We can consider that the coordinate of the element value 0 in the mask matrix 
 |
 |
 |
 |
As a preliminary verification of the advantages of our method, we first construct matrix Anew through using Eq. (
 | Fig. 2. Calculation results for (a) Φ and (b) Φ1 (Φ1 represents AnewAI), with x axis denoting row coordinate of matrix, and y axis representing column coordinate. |
Let 





 |
As shown in Fig. 






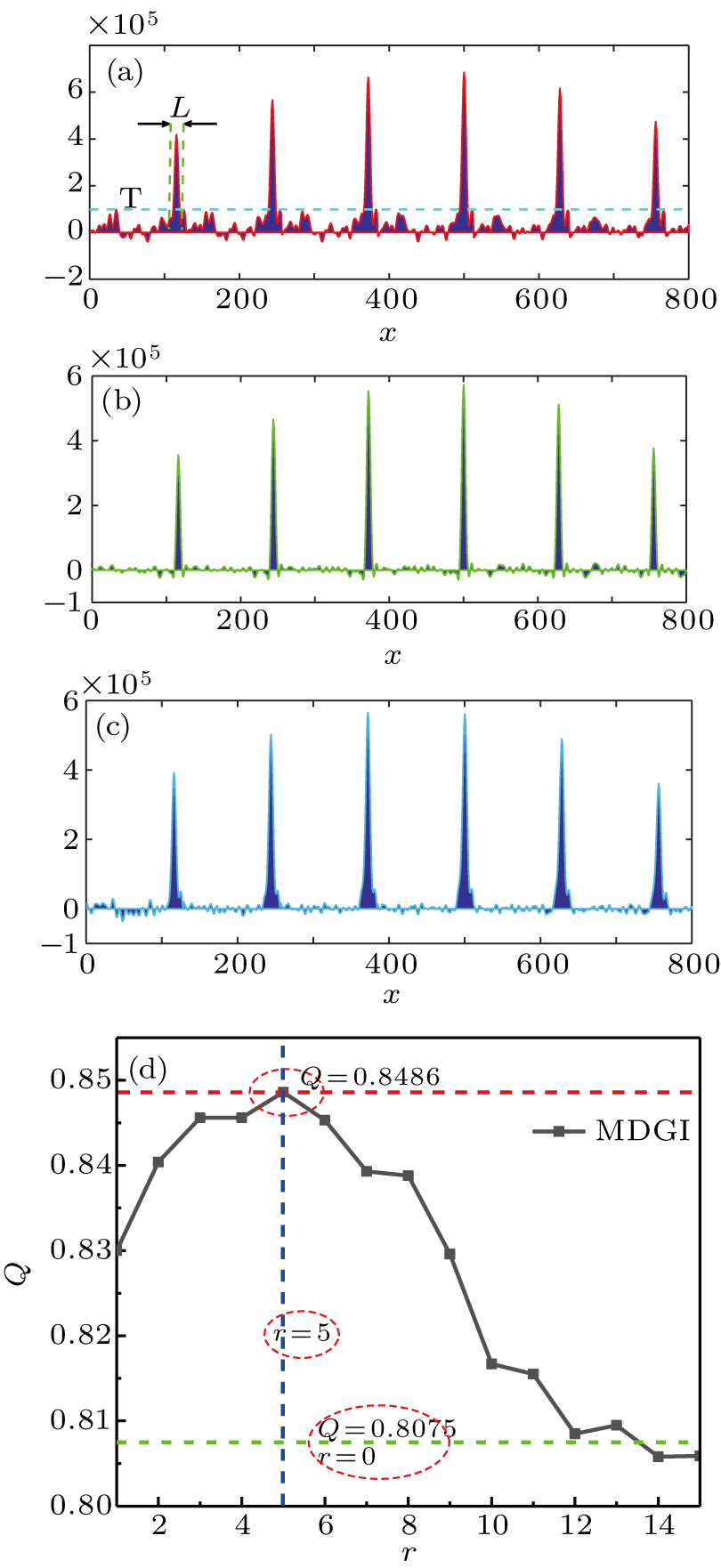
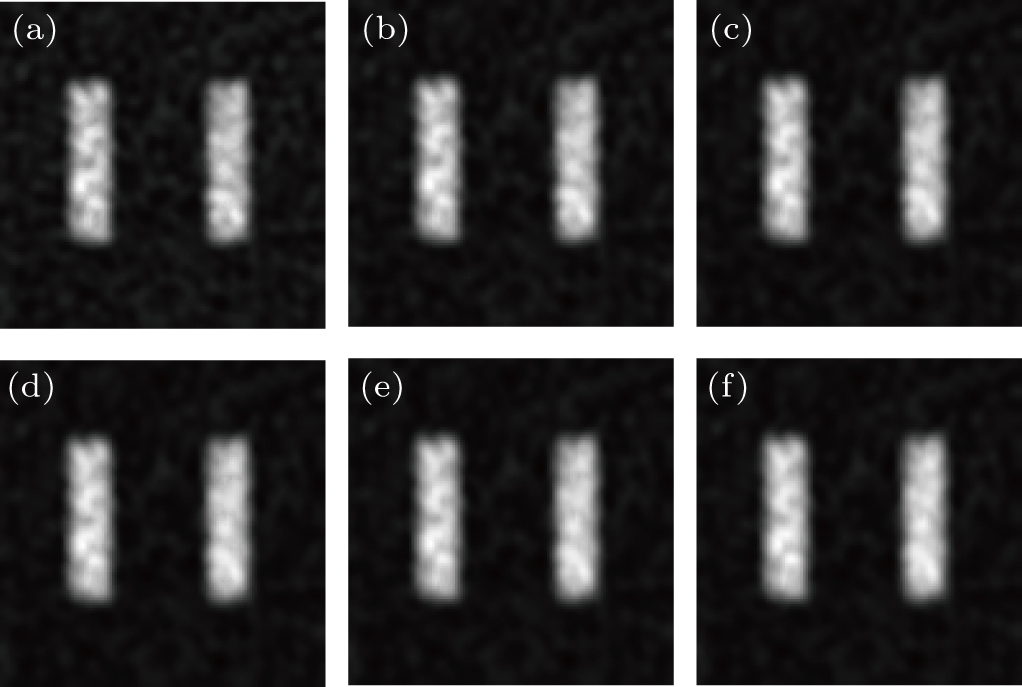 | Fig. 3. Performance influence in the presence of constructed mask in MDGI, indicated by the presented reconstruction “double-slit” images all obtained from 1000 measurements. (a) MDGI image based on mask 





|
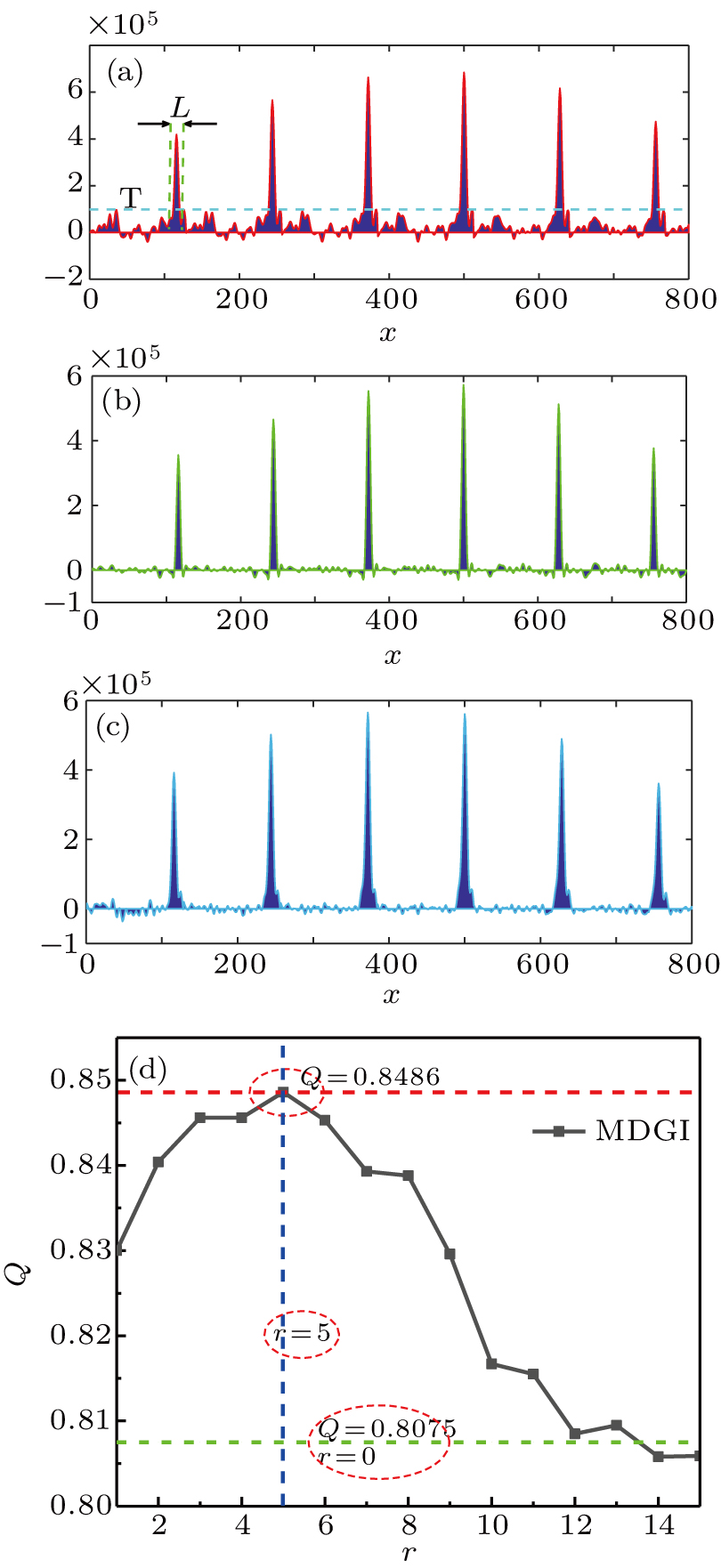 | Fig. 4. (a) a row of matrix 


|
| Table 1.
Reconstruction image PSNR and quality index Q based on different masks in Fig. |
Let 

 |
 |
 |
 |
Here, MSE represents the mean square error of the original object and the reconstructed image, and MAXI is the maximum pixel value of the original image. The bigger the PSNR value, the better the quality of reconstruction image is.
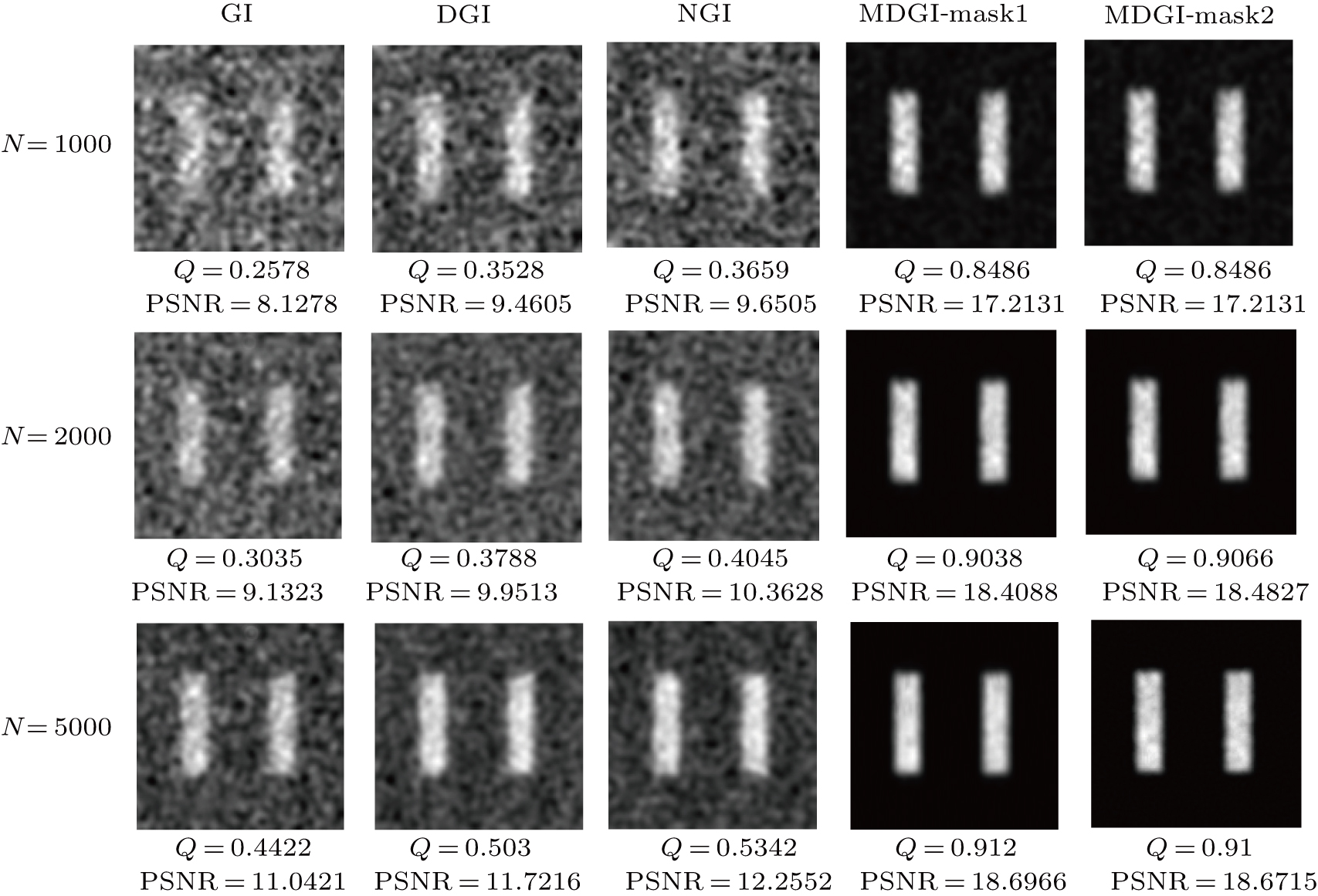
Figure 



 | Fig. 5. Simulation results of “double-slit” with GI, DGI, NGI, MDGI-mask1, and MDGI-mask2 with N measurements. |
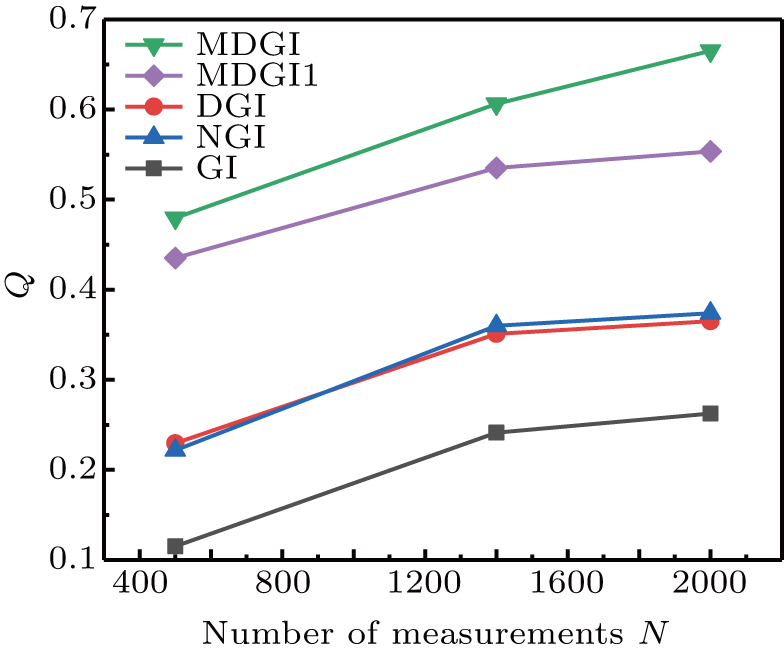
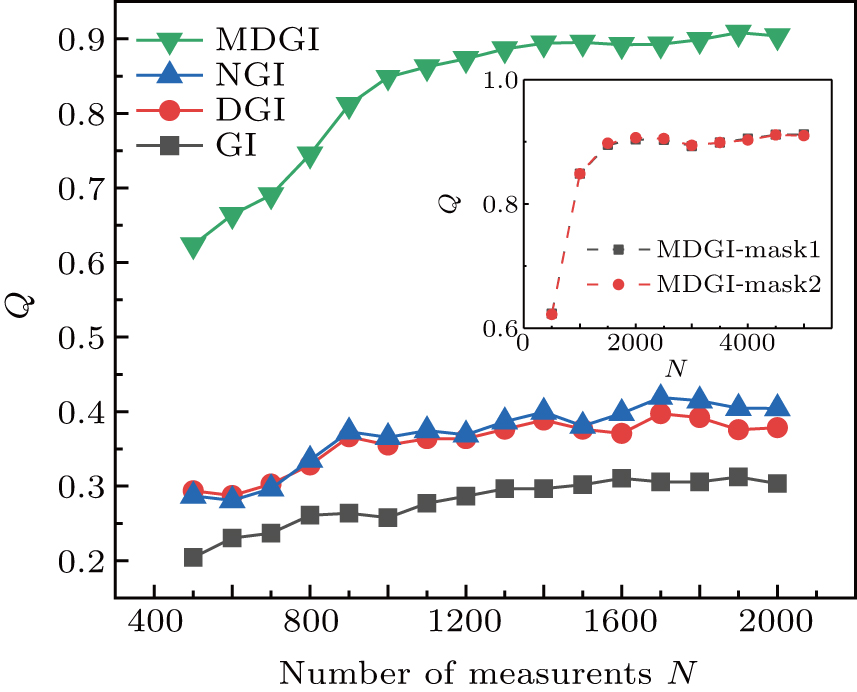 | Fig. 6. Relationships between the number of measurements and Q value for reconstructed binary image “double-slit” under different GI methods. Inset indicates the comparison between MDGI based on the same mask1 

|
As shown in Figs.
 | Fig. 7. Simulation results of traditional GI, DGI, NGI, MDGI, and MDGI1 with 2000 measurements. (a) Simulation results of binary image “palm”. (b) Simulation results of grayscale image “aircraft”. |
 | Fig. 8. Plots of Q value versus the number of measurements based on different reconstruction methods, based on the results obtained in Fig. 

|
3. Experimental results and analysis
To put our method into practice, we make an experimental system according to the experimental schematic in Fig. 
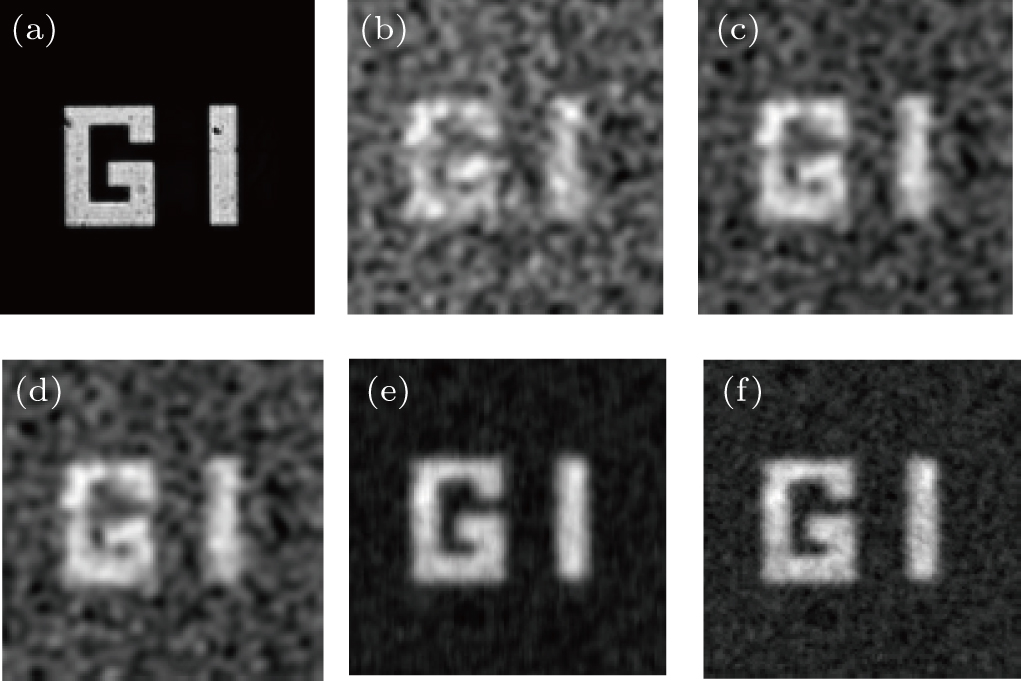 | Fig. 9. Experimental results for 2000 measurements. (a) Original object; (b) traditional GI image, PSNR = 9.3702 dB and Q = 0.2624; (c) DGI image, PSNR=11.3125 dB and Q = 0.3651; (d) NGI image, with PSNR=11.4031 dB and Q = 0.3738; (e) MDGI image, PSNR=16.5296 dB and Q = 0.6653; (f) MDGI1 image, PSNR=14.8747 dB and Q = 0.5535. |
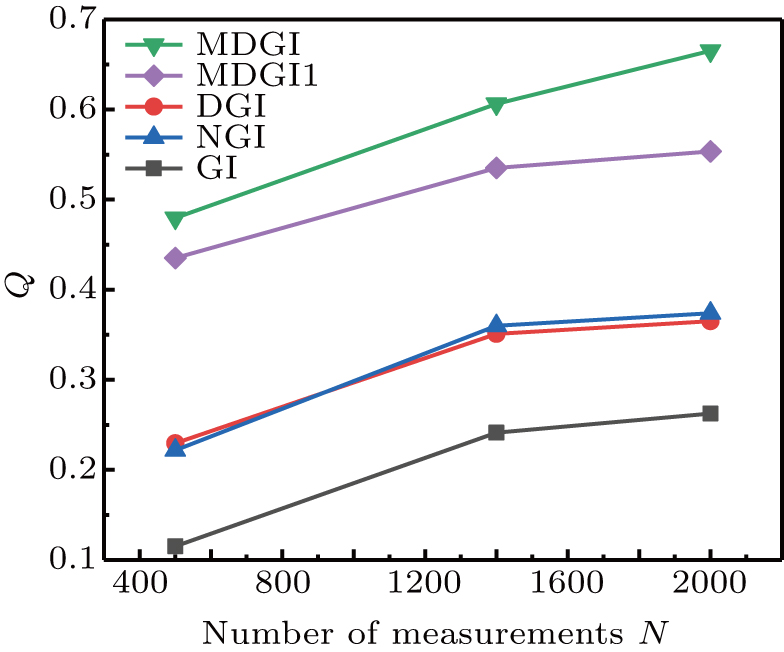 | Fig. 10. Relationships between the number of measurements and Q reconstruction image “GI” for different GI methods. Green solid curve with triangles represents MDGI. Purple solid curve with diamonds is for MDGI1. Red and blue solid curve with solid circles and triangles refer to DGI and NGI reconstruction results respectively. Black solid curve with squares is for GI reconstruction results. |
4. Conclusions
In this work, we have demonstrated the performance of MDGI through experimental and numerical simulations. We first theoretically analyze the influence of correlated noise in GI. A novel denoising model is thereafter proposed to remove the correlated noise in GI through a mask. Furthermore, the mask construction can be obtained by the idle reference detector measurements. Simulation and experimental results show that the reconstruction image quality from the proposed method is better than those from the GI, DGI, and NGI. This research provides an alternative way to the correlated noise suppression, which is also applicable to the fields of biological imaging, lidar, and so on.
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] | |
| [21] | |
| [22] | |
| [23] | |
| [24] | |
| [25] | |
| [26] | |
| [27] | |
| [28] | |
| [29] | |
| [30] | |
| [31] | |
| [32] | |
| [33] | |
| [34] | |
| [35] | |
| [36] | |
| [37] | |
| [38] | |
| [39] | |
| [40] |