{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Effects of imperfect pulses on dynamical decoupling using quantum trajectory method
Cite this Article
He Lin-Ze, Zhang Man-Chao, Wu Chun-Wang, Xie Yi, Wu Wei, Chen Ping-Xing. Effects of imperfect pulses on dynamical decoupling using quantum trajectory method. Chinese Physics B, 2018, 27(12): 120303 
Permissions
Effects of imperfect pulses on dynamical decoupling using quantum trajectory method
† Corresponding author. E-mail:
Project supported by the National Basic Research Program of China (Grant No. 2016YFA0301903), the National Natural Science Foundation of China (Grant Nos. 11174370, 11304387, 61632021, 11305262, and 61205108), and the Research Plan Project of the National University of Defense Technology (Grant No. ZK16-03-04).
Abstract
The dynamical decoupling (DD) method is widely adopted to preserve coherence in different quantum systems. In the case of ideal pulses, its effects on the suppression of noise can be analytically described by the mathematical form of filter function. However, in practical experiments, the unavoidable pulse errors limit the efficiency of DD. In this paper, we study the effects of imperfect pulses on DD efficiency based on quantum trajectories. By directly generating a pseudo noise sequence correlated in time, we can explore the performance of DD with different pulse errors in the typical noise environment. It shows that, for the typical 1/f noise environment, the phase error of operational pulses severely affects the performance of noise suppression, while the detuning and intensity errors have less influence. Also, we get the thresholds of these errors for efficient DD under the given experimental conditions. Our method can be widely applied to guide practical DD experimental implementation.
1. Introduction
Dynamical decoupling (DD), inspired by the application of Hahn echo in nuclear magnetic resonance,[1] is one approach widely used to maintain quantum coherence in various kinds of systems. By exerting a pulse sequence in the quantum evolution process, this method introduces a rapid, time-dependent control field to reduce the interaction with the environment. It was formally introduced in a general way by Viola,[2,3] explaining how a pulse sequence is arranged to compensate the noise effect. After that, several concrete protocols were proposed for different purposes, including periodic DD,[2,3] Carr–Purcell–Meiboom–Gill (CPMG),[4,5] Uhrig DD,[6] and so on. In recent years, different DD protocols have been experimentally demonstrated to preserve the coherence of qubits in trapped ions,[7,8] including the superconducting quantum circuit,[9] electron spins,[10,11] atomic ensembles,[12] semiconductor quantum dots,[13,14] and nitrogen vacancy centers in diamond.[15]
Ideal DD involves a sequence of instantaneous perfect π pulses as the control field, which are used to modulate interaction with the environment. With a tailed pulse sequence, this method can suppress certain frequency components of noise, and its effects can be theoretically described by filter functions. Based on this noise filtering mechanism, qubits can also be used as quantum sensors to detect environment noise.[16] However, unavoidable errors in operational pulses always exist in practical experiments. Even small imperfections, including deviations of pulse width, rotation angle and axis, can have a severe impact on the decoupling efficiency after the accumulation of numerous pulses, which has been pointed out in several works.[8,17–22] Since the pulse errors destroy the symmetry of the DD modulation, we cannot describe this process using concise analytical form like the filter function. Therefore, we use a numerical method to quantitatively analyze the DD process with imperfect pulses.
In this paper, we numerically generate the noise sequence with time correlation according to its power spectral density (PSD).[23] Based on the noise generation, we utilize the quantum trajectory method to numerically study the impacts of imperfections. Different types of pulse error can be directly simulated in the given noise environment to study their effects on DD. The simulated results illustrate that in a typical noise environment, such as 1/f noise, phase errors have more influence than detuning and intensity errors and error thresholds decrease with the rise of the pulse number. With these results, we now know how pulse errors influence the DD process in certain environments and this method therefore allows us to instruct various kinds of practical experiments.
The structure of this article is arranged as follows. In Section
2. Theoretical model of ideal DD
In this section, we give the analytical model for ideal DD by simply reviewing the results of Ref. [8]. In the DD operation, there are various kinds of protocols for sequence arrangement. Without loss of generality, the model here is based on the widely used CPMG sequence.[4,5]
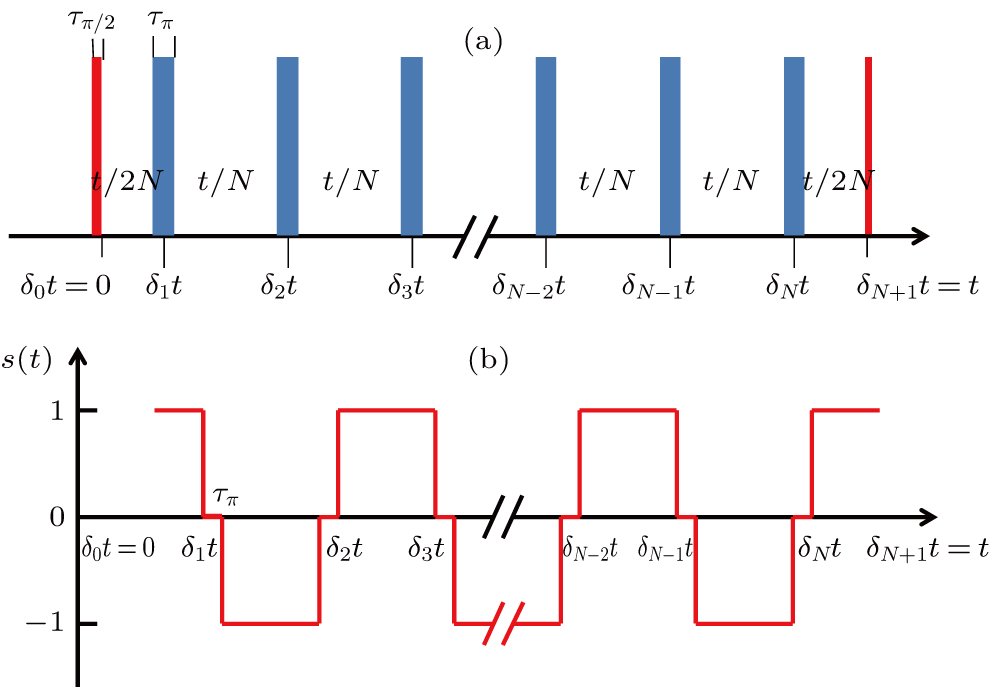
The noise suppression effect of DD is usually checked by a modified Ramsey process, with a number of instantaneous π pulses inserted between a pair of Ramsey π/2 pulses.[24] Particularly, the sequence arrangement of the CPMG protocol is demonstrated in Fig. 
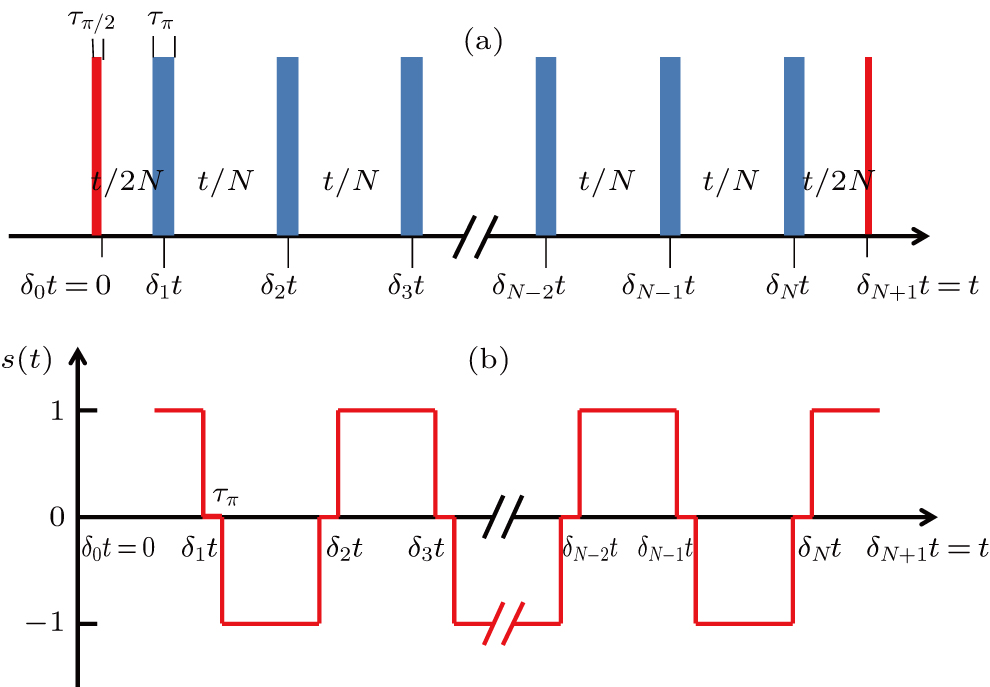 | Fig. 1. (color online) (a) CPMG sequence involves N π pulses evenly spaced at the time t between two π/2 pulses. The time interval between two π pulses is t/N. Each π pulse rotates the quantum state around the x-axis of the Bloch sphere, and the π/2 pulse rotates the state around the y-axis. (b) During the free-precession period, N π pulses change the phase accumulation direction alternately. It is described by a time-domain jump function s(t), with values indicating the phase accumulation direction. When a π pulse is operated, the value of the function is assumed to be zero. |
After the first π/2 pulse, the initial state |0〉 is prepared to the superposition state 



The state in Eq. (


Introducing the PSD p(ω) of noise, which is the Fourier transform of 
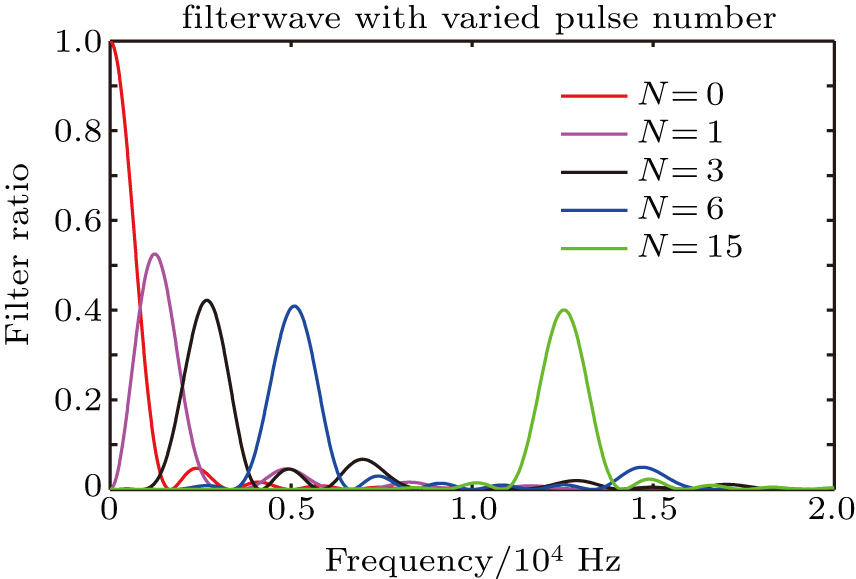
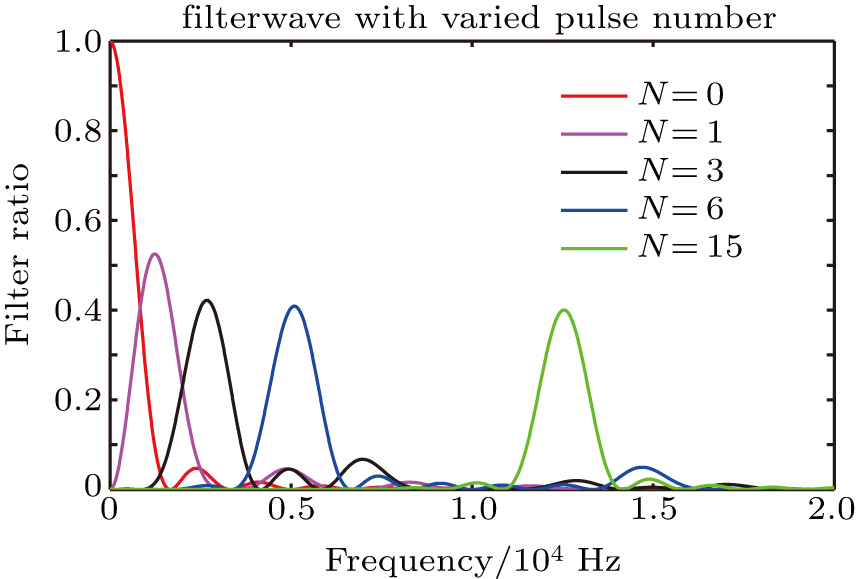 | Fig. 2. (color online) Filter functions with various pulse numbers. The filter function has a window of a specific range of frequency while it nearly remains zero in other frequency components, which shows the general effects of noise suppression. When there is no DD pulse, the filter function focuses on the low-frequency range. |
The above theoretical model and filter function are derived from ideal pulses, in which case the noise accumulation direction can be described by a concise and symmetrical jump function s(t). However, the imperfections of the pulse will destroy this symmetry, leading to difficulty in obtaining the analytical results. In addition, the imperfections are hard to describe and the accumulation of hundreds of pulses would make the theory form extremely complex. Therefore, a numerical method is required to replace the theoretical model, because it can simulate noise and pulse errors directly, obtaining the evolution results on a large scale of the ensemble average.
3. Numerical model of imperfect DD
In this section, we develop a numerical method for imperfect DD based on the quantum trajectory method. It should be emphasized that, to conveniently consider the time correlation characteristics of the ambient noise, we adopt a semi-classical model to describe the noise.
The quantum trajectory method, also known as the quantum jump method or quantum Monte Carlo wave function method, is one option to simulate quantum dissipation in an open system.[26] The main principle of this method is to evolve the system wave function in time with a pseudo-Hamiltonian, simulating randomization in every time step. The whole process of figuring out one result is called one quantum trajectory and the final result is the ensemble average of many trajectories. To simulate imperfect DD with this method, we must construct the numerical pulse error model and generate the noise sequence.
In the interaction picture and rotating wave approximation, the typical Hamiltonian of a two-level system with pulses in DD can be expressed as
As is known, any unitary transformation of the qubit state can be described as a rotation of the Bloch vector on the Bloch sphere, U = exp(ik)Rn(θ), where exp(ik) is a term about the global phase and Rn(θ) is the rotation operator which has a specific form:

In this numerical simulation tool, pulse errors are introduced in the form of parameter fluctuations of pulse detuning, intensity, and phase. Each parameter is fixed in every simulation time step and fluctuates in different time steps. The fluctuations are considered as random terms added to the standard parameter in the simulation. It is shown from Eq. (
In the numerical simulation, every trajectory means the evolution with one possible noise sequence. The corresponding evolution includes the unitary evolution of Hd with environmental noise and Hi with parameter fluctuations in pulses. The parameter fluctuations are white noise with different standard deviations, while the environmental noise is generated as a noise sequence according to its PSD which is assumed here or obtained from the experiment. To generate it, we discretize the PSD by sampling in its majority range and create frequency spectrum random variables.[22] Then the noise sequence is generated by Fourier transformation into the time domain. Here we choose a typical 1/f noise with its PSD p(f) = 50000/[1 + (f/1000)2] to generate a noise sequence and test its effectiveness by PSD estimation.
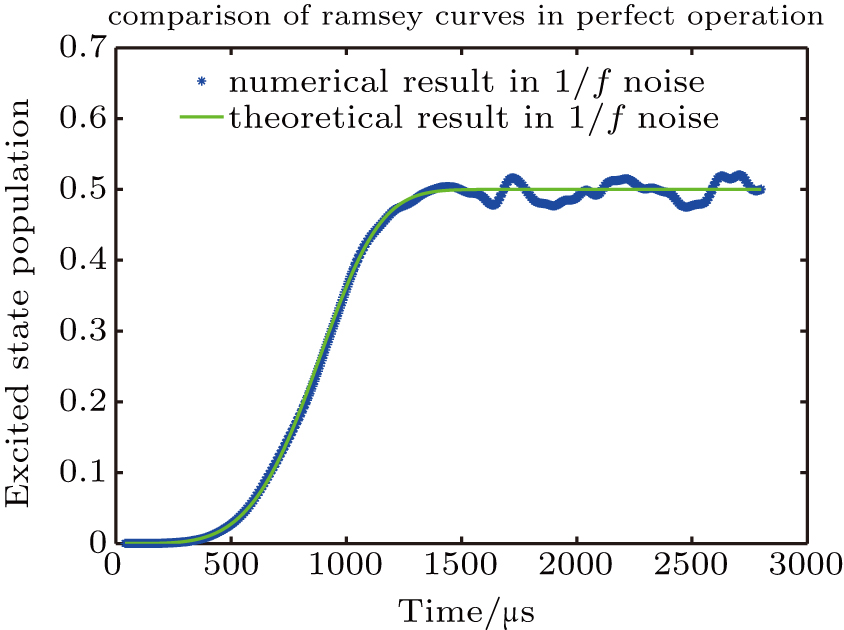
In this comparing simulation, we set the ensemble amount as 200. Each trajectory represents a whole Ramsey process with a given noise sequence. Through the trajectory average, this numerical tool simulates the real physical system to the most extent. In the 1/f noise environment, the Ramsey process with no pulse is simulated in Fig.
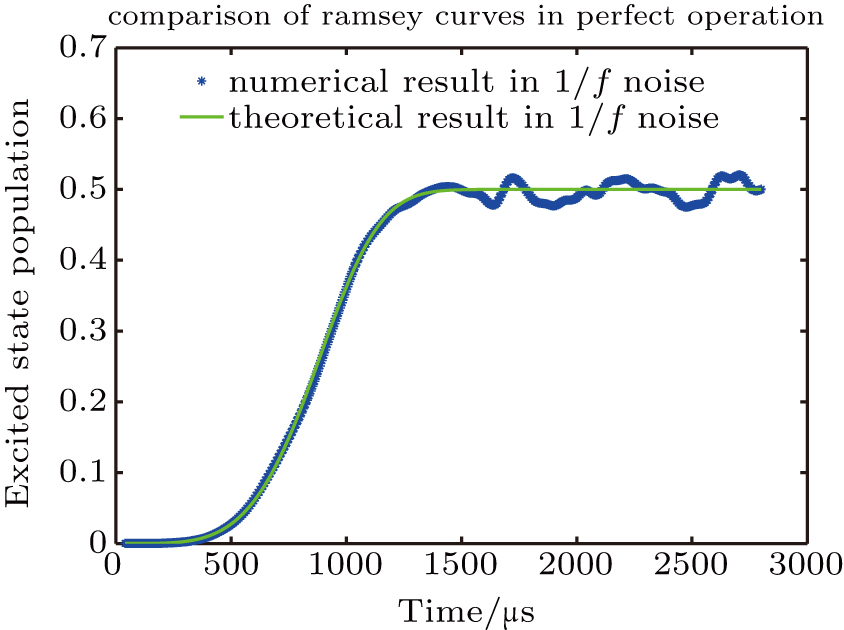 | Fig. 3. (color online) Comparison of simulated and theoretical results. For noise with 1/f PSD p(f) = 50000/[1 + (f/1000)2], theoretical and numerical results of Ramsey process show nearly perfect fitting and conversely prove the effect of the noise numerical simulation. |
4. Results of the influence of imperfections
To study the impact of pulse errors, we add parameter fluctuations to pulse physical parameters, including detuning, phase, and intensity, which directly influence the coupling strength. The quality of pulses is determined by these pulse parameters and they are set based on general experimental conditions. In the physical parameter arrangement, we assume π pulse detuning δ to be 0 Hz, phase ϕ to be 0, and coupling strength Ω, as well as Rabi frequency, to be 106 Hz. In the simulation, number of quantum trajectories is 1000 and we get the ensemble average as the final result. With regard to the noise environment, we choose 1/f noise because it is one typical type of noise in the experiment. The 1/f noise mainly focuses on the low-frequency components because such noise derives from the fluctuations in electronic devices. Here we adopt a general 1/f noise form, with its PSD p(f) = a/[1 + (f/f3)n]. Most frequency components and energy is focused within the low-frequency range while only a small proportion of noise power is distributed in the high-frequency range. Therefore, we choose one specific form of PSD p(f) = 50000/[1 + (f/1000)2] to guarantee that most power is concentrated within the low-frequency range. In the simulation, we assume parameter fluctuations to be white noise and Gaussian distributed. Different levels of the standard deviation of parameter fluctuation are set on pulse detuning, phase, and coupling strength. They are written as σδ, σϕ, and σΩ respectively. With this numerical simulation tool, we explore the general influence of these pulse error sources. But for specific experiments, environmental noise should be detected as a prerequisite and then the particular influence of imperfections can be analyzed to direct the experiment.
We simulate parameter fluctuations of detuning, phase, and coupling strength with 6 and 30 pulses respectively to compare the effects of error accumulation. In consideration of the current experimental developments, we simulate the imperfect DD sequences containing 6 and 30 pulses, which correspond to the cases of short coherence time qubits and relatively long coherence time qubits respectively. With regard to various parameter fluctuation sources, we set different stages based on different σδ, σϕ, and σΩ on each source to consider how errors influence decoherence. In the simulation, different standard derivations are set in the form of ratio value to Ω. We calculate the Ramsey fringe contrast of every curve and consider the qubit to become decoherent when the fringe contrast is below 1/e, at about 0.37. For convenience, we simplify the Ramsey fringe contrast as Ψ. According to Eq. (
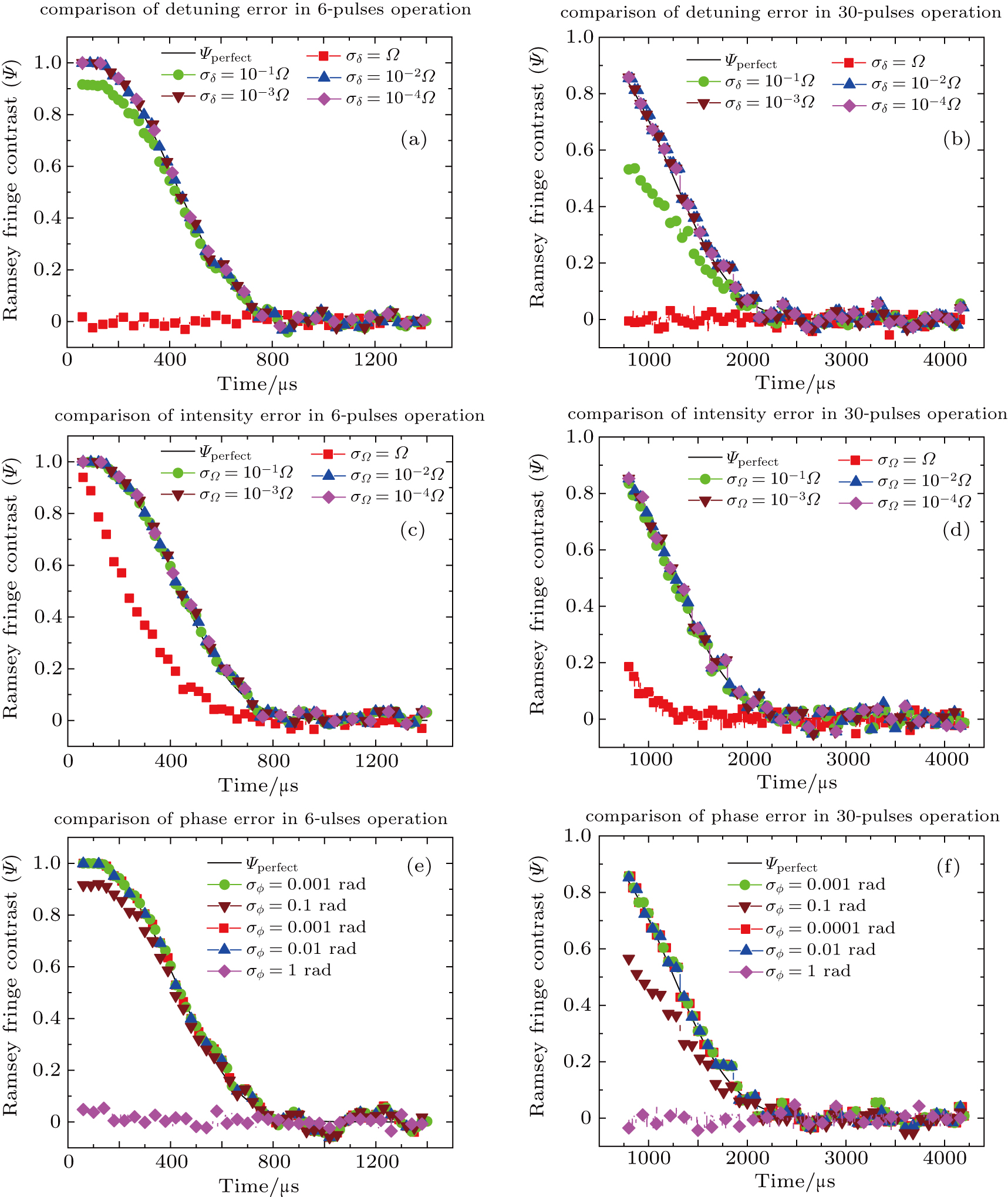
First we introduce detuning fluctuations and compare their impacts with different pulse accumulation in Fig.
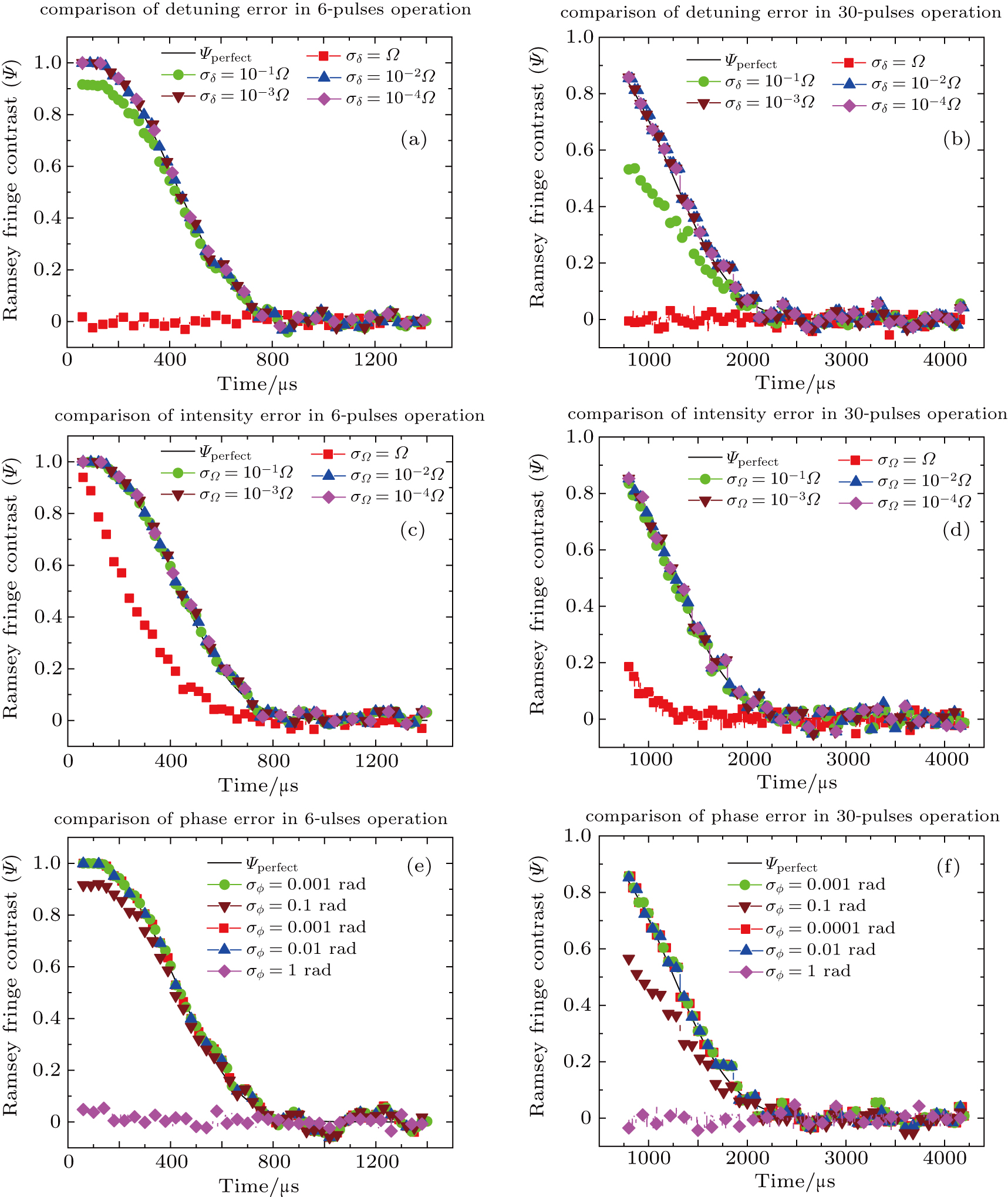 | Fig. 4. (color online) (a) and (b) Ramsey fringe contrast with detuning fluctuations in 6 pulses and 30 pulses. We set a series of σδ as 10−4Ω, 10−3Ω, 10−2Ω, 10−1Ω, and Ω. In the 6-pulse situation, the simulated results of σδ that are within 10−2Ω fit well with the perfect results. When σδ equals 10−1Ω, the simulated result deviates from the perfect result, while for σδ = Ω, the qubit becomes decoherent at the beginning. In the 30-pulse situation, the coherent time is prolonged by more pulses. On the other hand, the simulated curves do not fit well with the perfect curve like that in the 6-pulse situation because of the error accumulation. As is shown, for σδ within 10−2Ω, the results nearly remain the same as the perfect result. For σδ = 10−1Ω, the qubit tends to be more liable to dephase than in the situation of 6 pulses. Therefore, the detuning deviation thresholds are approximately 10−1Ω for the 6-pulse operation and tend to be lower than 10−1Ω for the 30-pulse operation. (c) and (d) Ramsey fringe contrast with intensity fluctuations in 6 and 30 pulses. σΩ varies among 10−4Ω, 10−3Ω, 10−2Ω, 10−1Ω, and Ω. The coherent time of the perfect operation in 6 pulses and 30 pulses is similar to the detuning situation. For the 6-pulse and 30-pulse situations, when σΩ does not exceed 10−1Ω, the simulated results fit well with the perfect results, but the derivations of the 30-pulse situation are amplified because of the error accumulation. In the 6-pulse situation, the curve of σΩ = Ω is deviates notably from the perfect results, while this trend is exaggerated in the 30-pulse situation. The threshold of fluctuation in pulse intensity is a little below Ω according to these two figures. (e) and (f) Impacts of phase fluctuations with 6 and 30 pulses compared with the perfect operation. We set a series of σϕ as 1 rad, 0.1 rad, 0.01 rad, 0.001 rad, and 0.0001 rad. For Ramsey fringe contrast (Ψ) with 6 pulses in different deviation groups, when σϕ is less than or equal to 0.01 rad, the phase error seems to be less influential on the decoherence and fits well with the perfect results. When σϕ is 0.1 rad, the simulated curve is slightly deviated from the perfect pulse curve. For σϕ = 1 rad, the qubit becomes completely decoherent in the beginning. In the situation of 30 pulses, the influence of errors is notably amplified compared to that with 6 pulses. The qubit is more sensitive to phase noise. When σϕ exceeds 0.1 rad, the coherence is destroyed completely. In addition, for a σϕ of 0.1 rad, the curve is split from the perfect situation clearly. The thresholds of both situations are a little below 0.1 rad. |
As phase errors almost determine the length of coherent time, much caution should be applied on this parameter. The preciseness of the pulse phase should be stressed particularly in pulse control. Its electronic error that causes phase instability should also be eliminated completely. Fluctuations in detuning and coupling strength have similar impacts on the evolution process. This is partially because their fluctuation range is tiny compared to the energy level and coupling strength. But it also depends on the real experimental conditions. As a result, we can conclude that the phase noise is the most important error source in the Ramsey process.
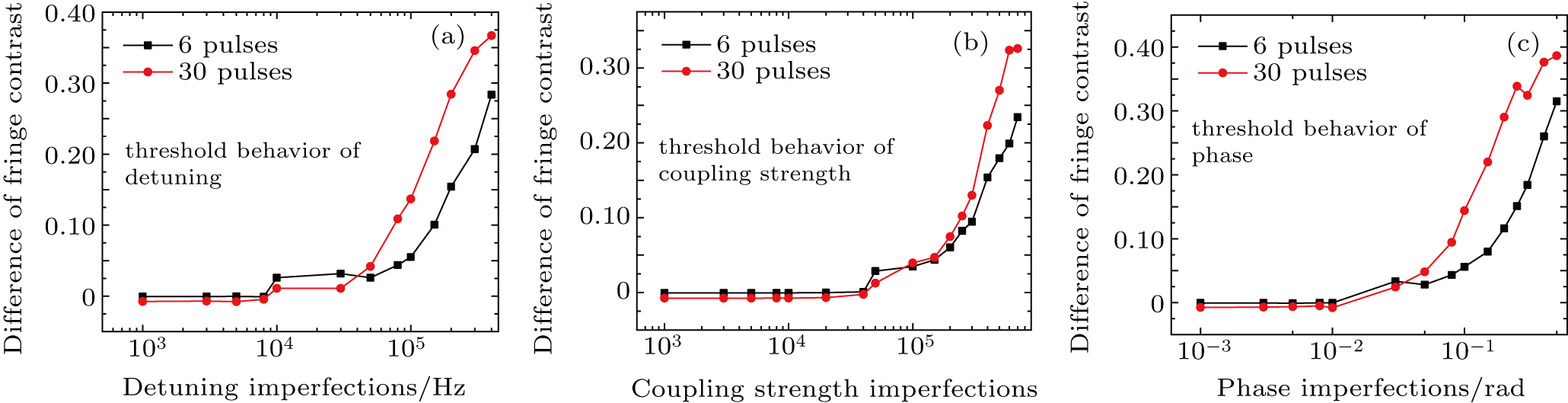
The threshold of different kinds of imperfections with different pulse numbers is one important parameter in the experimental implementation. We can compare the fringe contrast between the case of perfect pulses and imperfect pulses with various amounts of fluctuations to get the threshold. As we have defined before, the time when the analytical fringe contrast is around 0.37 is the coherence time. At this time, we observe the fringe contrast of other simulated results and calculate the difference from 0.37. This difference indicates the decoherence caused by pulse imperfections. We can also state that the imperfections have no obvious effects on decoherence if the difference is less than 0.05. The detailed comparison of detuning, intensity or coupling strength, and phase imperfections is shown in Fig.
 | Fig. 5. (color online) (a) Threshold behavior of detuning with imperfections increasing in 6- and 30-pulse situations. Several data points are adopted to show the difference of fringe contrast from the analytical result. For certain detuning imperfections, the fringe contrast difference is increased for the 30-pulse situation because of error accumulation. For the threshold of detuning, the point where the curve rises sharply is around the threshold. As is seen, the detuning threshold for the 6-pulse situation is 5 × 104 Hz and for the 30-pulse situation it is around 3 × 104 Hz. The accumulation of pulses can continuously decrease the thresholds. (b) Threshold behavior of coupling strength, as well as intensity, with imperfections increasing in the 6- and 30-pulse situations. We select many data points that range from 103 Hz to 7 × 105 Hz. It is shown that the threshold for the 6-pulse situation is around 1.5 × 105 Hz and for 30 pulses, it is about 3 × 104 Hz. (c) Threshold behavior of phase with imperfections increasing in the 6- and 30-pulse situations. It is shown that the threshold of the phase is 0.05 rad for the 6-pulse situation and 0.01 rad for the 30-pulse situation. |
The simulation of pulse imperfections is beneficial to instruct the experimental practice. Our simulation can reveal the thresholds of pulse errors in detuning, intensity, and phase under certain experimental conditions. In practical experiments, the frequency drift, fluctuation in the power of lasers, and phase fluctuation induced by various sources can be monitored as parameter fluctuations. When these fluctuations exceed their thresholds, they are inclined to induce decoherence. The results of the simulation indicate which part of the laser parameters need to be improved and to what extent they need to be optimized. For this reason, we are able to guarantee the efficiency of the DD operation.
5. Summary
We have demonstrated the application of CPMG, for one specific sequence, in the Ramsey process. This process can be completely described by the theory of filter function, which is determined by the pulse number, time interval between pulses, and pulse operation time. In this process, the quality of pulses is fundamental for the final result as an accumulation of pulse errors would destroy the coherence. Due to the fact that it is difficult to calculate the influence of pulse imperfections, we adopt a numerical method to generate noise to build a numerical tool for the simulation of the Ramsey process. According to the PSD of the noise environment, it is reliable to simulate the whole Ramsey process with the DD sequence. We assume a typical 1/f noise environment and simulate the Ramsey process with fluctuations of the pulse parameters. Generally, the quantum state is robust to intensity and detuning errors but extremely sensitive to phase noise. In addition, through simulation, we know the thresholds of the fluctuations of these physical parameters of the pulse. Some improvements can be made to the pulses to reduce fluctuations below the threshold value. Therefore, this simulation tool guides us in improving the experiment, especially when environmental noise is roughly detected by a spectral analyzer. If the pulse noise is designed in the simulation, the results could be an important reference to the real experiment.
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] | |
| [21] | |
| [22] | |
| [23] | |
| [24] | |
| [25] | |
| [26] |