1. IntroductionWith the development of communication networks and powerful embedded systems, distributed cooperative control for multi-agent systems (MAS) has received compelling attention from various research fields, such as robotic teams,[1] sensor networks,[2] and underwater vehicles.[3] The uncertainty and unpredictability of multi-agent systems often appear in practical applications. In the stability analysis of MAS with uncertainties, it is extremely challenging to construct the Lyapunov function properly.
Among collective behaviors of multiple agents, consensus is one of the most important behaviors, which means that all agents will reach a common state eventually. Recently, the consensus problem of multi-agent systems has been intensively studied.[4–10] In Refs. [6–8], the studies of MAS focus on linear systems. The consensus of nonlinear MAS is more challenging than that of linear MAS. Nonlinearity is ubiquitous in physical phenomena, however only a few works have been done to research the consensus of nonlinear MAS.[9–11] For example, Ren et al. studied the tracking control of second-order nonlinear MAS via two different kinds of sliding mode structures, whereas the considered model is without disturbance.[11] In practical implementations, the external disturbance may not be ignored and should be considered. In Refs. [12–21], the consensus problem of MAS with disturbances was discussed. Yang et al.[12] proposed the asymptotic convergence protocol of MAS with disturbances and some similar results can be found in Refs. [13] and [14] and the references therein. So far, most of the existing control algorithms for MAS are asymptotically convergent.[12–14, 22–24] Compared to the asymptotic consensus, the finite-time consensus control is an effective approach with high performance, good robustness to uncertainties, and better disturbances rejection properties. Zhang et al.[15] investigated the finite-time tracking control for nonlinear MAS subject to external disturbances. Chen et al.[16] solved the finite-time cooperative tracking problem for a class of networked Euler–Lagrange systems. Continuous distributed finite-time control algorithms were designed for multiple agents with double integrators in Refs. [17]. Yu et al.[18] and He et al.[19] investigated the finite-time tracking control of second-order multi-agent systems with bounded external disturbances. The former is for linear systems and the latter is for nonlinear systems. Nevertheless, the bounds of the external disturbances in Refs. [12–20, 20] are assumed to be known, which are actually difficult to obtain in practice. To estimate the unknown bounds, the adaptive control is a good method.[25, 26] Zhao et al.[25, 26] studied the attitude synchronization control problem for a group of spacecrafts and the containment control problem for second-order multi-agent systems using the sliding mode associated with adaptive methodology. At present, however, there are few results focusing on the finite-time distributed adaptive control problem for heterogeneous nonlinear multi-agent systems with unknown external disturbances.
From the review of the existing works on consensus of MAS, it can be observed that there are still some challenging issues to be addressed. One of the issues is to consider more general nonlinear MAS with heterogeneous dynamics and external disturbances. The bounds of the external disturbances may be unknown, which is more practical and challenging. Another issue is to develop more efficient control algorithms, which have the following features: 1) distributed, which means each agent can only use the local information of its neighbors; 2) finite time, which makes the tracking error converge in finite time, 3) adaptive, which can estimate the unknown bounds of the external disturbances. However, the control mechanisms in most existing results only have some but not all of these features.
Motivated by the above discussion, in this paper, we investigate the distributed adaptive sliding mode control for tracking consensus of heterogeneous second-order nonlinear multi-agent systems with unknown external disturbances. The contributions of this paper are three-fold. 1) On account of the fact that the information of the position and velocity of the leader is unmeasurable, the neighbor-based distributed finite-time observers are proposed for the followers to estimate the information of the leader. 2) Two novel distributed adaptive sliding mode control strategies are designed. The asymptotic tracking is based on linear sliding mode (LSM) and the finite-time tracking is based on nonsingular terminal sliding mode (NTSM). 3) Our rigorous proof shows that the tracking error can converge to zero asymptotically by LSM or to a quite small neighborhood of the origin in finite time by NTSM in spite of uncertainties and disturbances. Therefore, the proposed control algorithms are insensitive and robust to the uncertainties and unknown external disturbances.
The rest of the paper is organized as follows. Section 2 introduces some necessary preliminaries and problem formulation. Section 3 solves the asymptotic tracking and finite-time tracking problem of the leader–follower MAS via LSM and NTSM, respectively. In Section 4, a numerical example is provided to demonstrate the effectiveness of the proposed control schemes. Finally, Section 5 concludes the paper.
2. Preliminaries and problem formulationFor the sake of better understanding, we recall some preliminaries on graph theory, which can be referred to Ref. [27] for more details, and then formulate our problem.
2.1. Graph theoryIn this paper, we consider a class of leader–follower multi-agent systems consisting of one leader and N followers. The topology relationship of the followers and the leader can be described by a graph  . We assume that the information transfer between the followers is undirected (denoted by an undirected graph
. We assume that the information transfer between the followers is undirected (denoted by an undirected graph  ), while the agents in graph
), while the agents in graph  are connected to the leader by directed edges, that is, the information can only be transferred from the leader to the followers.
are connected to the leader by directed edges, that is, the information can only be transferred from the leader to the followers.
The undirected graph  consists of a vertex set
consists of a vertex set  denoting N agents, a set of undirected edges
denoting N agents, a set of undirected edges  , and a weighted adjacency matrix
, and a weighted adjacency matrix  , where
, where  and
and  .
.  if and only if
if and only if  . Two nodes i and j are adjacent or neighbors if
. Two nodes i and j are adjacent or neighbors if  . The neighbors set of agent i is denoted by
. The neighbors set of agent i is denoted by  . The graph
. The graph  is called connected if there is a path between any two nodes in
is called connected if there is a path between any two nodes in  . The Laplacian matrix
. The Laplacian matrix  with respect to graph
with respect to graph  is defined as
is defined as
where

is the degree matrix with the diagonal elements
.
The leader adjacency matrix associated with graph  is defined as
is defined as  , where
, where  if the leader is a neighbor of agent i (that is, there is a directed edge from agent i to the leader) and otherwise
if the leader is a neighbor of agent i (that is, there is a directed edge from agent i to the leader) and otherwise  . The graph
. The graph  is said to be connected if at least one agent in each component of graph
is said to be connected if at least one agent in each component of graph  is connected to the leader by a directed edge. Note that graph
is connected to the leader by a directed edge. Note that graph  is connected does not mean graph
is connected does not mean graph  is also connected. For convenience, we denote
is also connected. For convenience, we denote  .
.
Throughout this paper,  denotes the n-dimensional real vector space and
denotes the n-dimensional real vector space and  denotes the
denotes the  real matrix space.
real matrix space.  represents the
represents the  all-one column vector and
all-one column vector and  represents the all-zero column vector.
represents the all-zero column vector.  denotes the n-dimensional identity matrix. Given a vector
denotes the n-dimensional identity matrix. Given a vector  and a constant α, we define
and a constant α, we define  ,
,  , and
, and  ,
,  , where
, where  is the signum function.
is the signum function.  ,
,  , and
, and  denote 1-norm, 2-norm, and infinity norm of the vector
denote 1-norm, 2-norm, and infinity norm of the vector  , respectively. A basic relationship among these norms is
, respectively. A basic relationship among these norms is  Given matrices
Given matrices  and
and  , their Kronecker product is defined as
, their Kronecker product is defined as
2.2. Problem formulationIn this paper, the dynamics of each follower is described by the following second-order heterogeneous nonlinear MAS
where

, and

are the position, velocity, and control input of the
i-th follower, respectively. The unknown vector function

is intrinsic nonlinear dynamics and

is the unknown external disturbance of the
i-th follower. We assume that

, and

is an unknown constant.
The leader’s dynamics is described as
where

and

is a nonlinear function.
To begin with, we have the following assumptions.
Assumption 1 In system (1), assume that  is the estimate of
is the estimate of  and satisfies
and satisfies  ,
,  , where
, where  are bounded continuous nonlinear functions.
are bounded continuous nonlinear functions.
Assumption 2 In system (2), there exists a non-negative constant c such that  .
.
Lemma 1[27] Let  be the Laplacian of an undirected graph
be the Laplacian of an undirected graph  with N vertices. Then,
with N vertices. Then,  is a symmetric and positive semi-definite matrix. Since each row sum of
is a symmetric and positive semi-definite matrix. Since each row sum of  is zero,
is zero,  has a zero eigenvalue associated with the eigenvector
has a zero eigenvalue associated with the eigenvector  , i.e.,
, i.e.,  . Moreover, if the graph is connected,
. Moreover, if the graph is connected,  has only one zero eigenvalue and all the other eigenvalues are positive.
has only one zero eigenvalue and all the other eigenvalues are positive.
Lemma 2[28] If the graph  is connected, then the symmetric matrix
is connected, then the symmetric matrix  associated with
associated with  is positive definite.
is positive definite.
Lemma 3[26] Suppose that there exists a continuous positive definite function  satisfying
satisfying
where

, then

will converge to the equilibrium point in finite time
T given by
Lemma 4[26] For any positive scalar  ,
,  with
with  .
.
3. Main resultsIn this section, to track the leader, the control protocol  will be designed based only on the relative information between agent i and its neighbors. In our problem, the position and velocity of the leader are not known to any follower even if it is connected to the leader during the tracking process. In this case, a second-order distributed observer is designed for each follower to estimate the state of the leader.
will be designed based only on the relative information between agent i and its neighbors. In our problem, the position and velocity of the leader are not known to any follower even if it is connected to the leader during the tracking process. In this case, a second-order distributed observer is designed for each follower to estimate the state of the leader.
Similar to Ref. [4], the distributed finite-time estimator is proposed as
where

and

are the estimated position and velocity of the
i-th follower to the leader, respectively. For convenience, we denote
and
, where

and

,

.
According to Eqs. (2) and (3), we have
With some mild modification, we give Theorem 4.1 of
[4] as follows.
Proposition 1[4] Consider the leader–follower multi-agent systems (1) and (2). Assume that the adjacency graph  is connected and Assumptions 1 and 2 hold. Using the distributed estimator protocol (3) with
is connected and Assumptions 1 and 2 hold. Using the distributed estimator protocol (3) with  , the followers can obtain the estimation of the position and velocity of the leader in finite time T, namely,
, the followers can obtain the estimation of the position and velocity of the leader in finite time T, namely,  ,
,  as
as  , and
, and  ,
,  for any
for any  ,
,  .
.
3.1. Linear sliding mode control designIn this subsection, a new sliding mode controller protocol is proposed to guarantee that each agent can achieve the consensus as time goes to infinity.
We design the LSM vector as
where
hij is the element of

and

.
Denote  and
and  , where
, where  ,
,  ,
,  It follows from Eqs. (1) and (3) that
It follows from Eqs. (1) and (3) that
where
, and

.
Then the LSM vector can be rewritten as
where
.
Let  be the estimate of the unknown constant
be the estimate of the unknown constant  . The adaptation update law for the upper bound of
. The adaptation update law for the upper bound of  is designed as
is designed as
where

and

.
The control law based on the linear sliding mode is given as
where

and

.
Theorem 1 For the MAS (1) and (2), assume that the adjacency graph  is connected and Assumptions 1 and 2 hold. Then, under the distributed observer (3), the adaptive law (8) and the control protocol (9) based on the sliding mode (5), the tracking consensus of the MAS can be reached asymptotically, namely,
is connected and Assumptions 1 and 2 hold. Then, under the distributed observer (3), the adaptive law (8) and the control protocol (9) based on the sliding mode (5), the tracking consensus of the MAS can be reached asymptotically, namely,  ,
,  ,
,  .
.
Proof Firstly, we show that  and
and  of system (1) are bounded during the time
of system (1) are bounded during the time  .
.
Consider the following Lyapunov function
Taking the derivative of

yields
Owing to

and Assumption 1, substituting (
9) into the above equation yields
where

, and in the above inequality the Hölder inequality
has been used.
According to Assumption 1, there exists a constant  such that
such that  . We have
. We have
Thus, for

, we can obtain
On the other hand, since  and
and 
 , it can be inferred that the states of system (1) cannot diverge to infinity during
, it can be inferred that the states of system (1) cannot diverge to infinity during  .
.
Next, when  , construct the Lyapunov function
, construct the Lyapunov function
where

. Since the adjacency graph

is connected,
V4 is positive definite by Lemma 2. Taking the derivative of
V4 yields
From Proposition 1, we have  ,
,  as
as  . Thus,
. Thus,
The above inequality implies that

for any

. By the LaSalle–Yoshizawa Theorem (Theorem 2.17 in Ref. [
29]), we can conclude that

as

. Then the sliding surface is reached.
On the sliding mode  , using Eq. (7), we obtain
, using Eq. (7), we obtain
which implies that
Hence
Choose the Lyapunov function as

. One can conclude that
As a consequence,

as

. At the same time,

as

.
This completes the proof.
3.2. Nonsingular terminal sliding mode control designIn this subsection, we come up with a novel controller based on NTSM to make the tracking error of each agent converge to a quite small neighborhood of the origin in finite time.
We design the NTSM vector as
where
hij is the element of

and

. Then the NTSM vector can be written as
where
,

,

Let  be the estimate of the unknown constant
be the estimate of the unknown constant  . The adaptation update law of
. The adaptation update law of  is given as
is given as
where

,

,

, and

are the designable parameters, and
sip and
vip are the
p-th components of

and

, respectively.
The control law based on the nonsingular terminal sliding mode is designed as
where

and
with

.
Denote 
 .
.
Theorem 2 For the MAS (1) and (2), if the adjacency graph  is connected and Assumptions 1 and 2 hold, then with the distributed observer (3), the adaptive law (13), and the control protocol designed in Eqs. (14)–(16) based on the sliding mode (11), the tracking error of MAS will converge to
is connected and Assumptions 1 and 2 hold, then with the distributed observer (3), the adaptive law (13), and the control protocol designed in Eqs. (14)–(16) based on the sliding mode (11), the tracking error of MAS will converge to  and
and  in finite time, where
in finite time, where

,

,

,

,

.
Proof Firstly, by similar arguments as those in Theorem 2, one can obtain that  and
and  of system (1) are bounded during the time
of system (1) are bounded during the time  , which is omitted.
, which is omitted.
Next, when  , construct the Lyapunov function
, construct the Lyapunov function
where

Taking the derivative of

yields
(i) When  ,
,
It follows from Proposition 1 that when

,

,

. Thus
From Lemma 5, one has

, and substituting it into the above inequality yields
Thus, we obtain
where
By  and Lemma 5, we have
and Lemma 5, we have
and then

.
(ii) When  ,
,
where

and
.
Define  ,
,  ,
,  ,
,  .
.
In the following, we will show that once  ,
,  , sip will stay therein forever. Similar to the proof in Ref. [26], the analysis will be divided into two cases.
, sip will stay therein forever. Similar to the proof in Ref. [26], the analysis will be divided into two cases.
(I) For the case  , when
, when  , the following inequality holds:
, the following inequality holds:
which means that all the sliding modes
sip can converge to the region

.
(II) For the case  , we also need to illustrate that
, we also need to illustrate that  ,
,  is not an attractor, and the reachability of NTSM (11) can be guaranteed. By substituting the controller (14) into Eq. (16), it is easy to obtain
is not an attractor, and the reachability of NTSM (11) can be guaranteed. By substituting the controller (14) into Eq. (16), it is easy to obtain
where

,


. The upper bound of
qip is assumed as
χ,

. Since
, then

. Thus, there exists at least one
i such that

for

. We get a contradiction.
In cases (I) and (II), once  , one has
, one has
Hence, the sliding variables
sip can reach the region

in finite time.
We next prove that the tracking error of MAS will converge to the region  and
and  by two cases.
by two cases.
(III) In case (I),  , we can obtain
, we can obtain  ,
,  , which also means
, which also means
Thus,
Since

, the above equality can be rewritten as
that is,
Then when

, equation (
19) is still kept in the form of TSM, which also means
and

.
(IV) In case (II), we have  . Similar to the above arguments, we have
. Similar to the above arguments, we have  ,
,  , which can also lead to
, which can also lead to  .
.
In summary, the tracking error of MAS will converge to  and
and  .
.
Corollary 1 For the MAS (1) and (2), if li, the upper bound of  , is a known constant, then under the conditions of Theorem 2, the tracking error of MAS will converge to zero in finite time.
, is a known constant, then under the conditions of Theorem 2, the tracking error of MAS will converge to zero in finite time.
4. Simulation resultsIn this section, a numeral example is presented to illustrate the theoretical results. The example considers MAS (1) and (2) with one leader indexed by 0 and four followers indexed by 1–4. The communication topology graph  is given in Fig. 1.
is given in Fig. 1.
The dynamics of the agents described in Eqs. (1) and (2) are given by  and
and  . It is obvious that the nonlinear term
. It is obvious that the nonlinear term  and
and  can satisfy Assumptions 1 and 2, where
can satisfy Assumptions 1 and 2, where  ,
,  ,
,  ,
,  . The external disturbances are chosen as
. The external disturbances are chosen as  , i=1, 2, 3, 4. In all the simulations, γ=0.5, β=0.8, μ=0.2,
, i=1, 2, 3, 4. In all the simulations, γ=0.5, β=0.8, μ=0.2,  ,
,  ,
,  , η=3/5,
, η=3/5,  ,
,  ,
,  ,
,  , i=1, 2, 3, 4. We choose the initial value of the MAS as
, i=1, 2, 3, 4. We choose the initial value of the MAS as  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
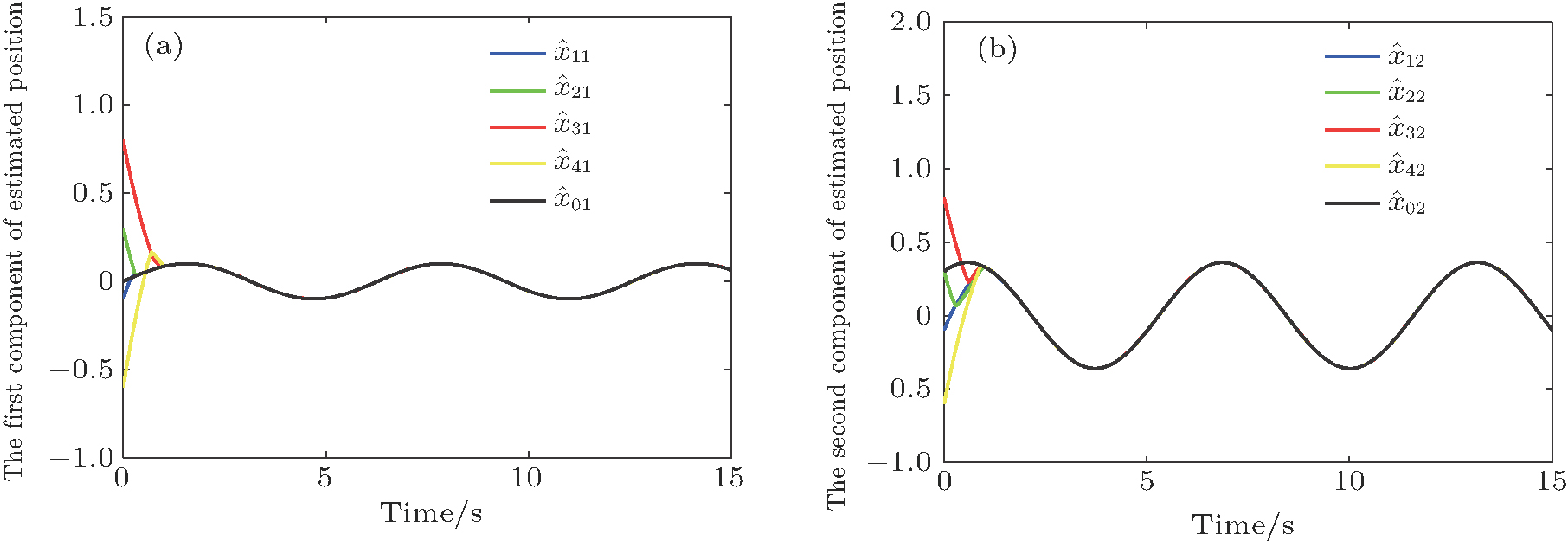
Figures 2 and 3 show the response curves of the estimated parameters  and
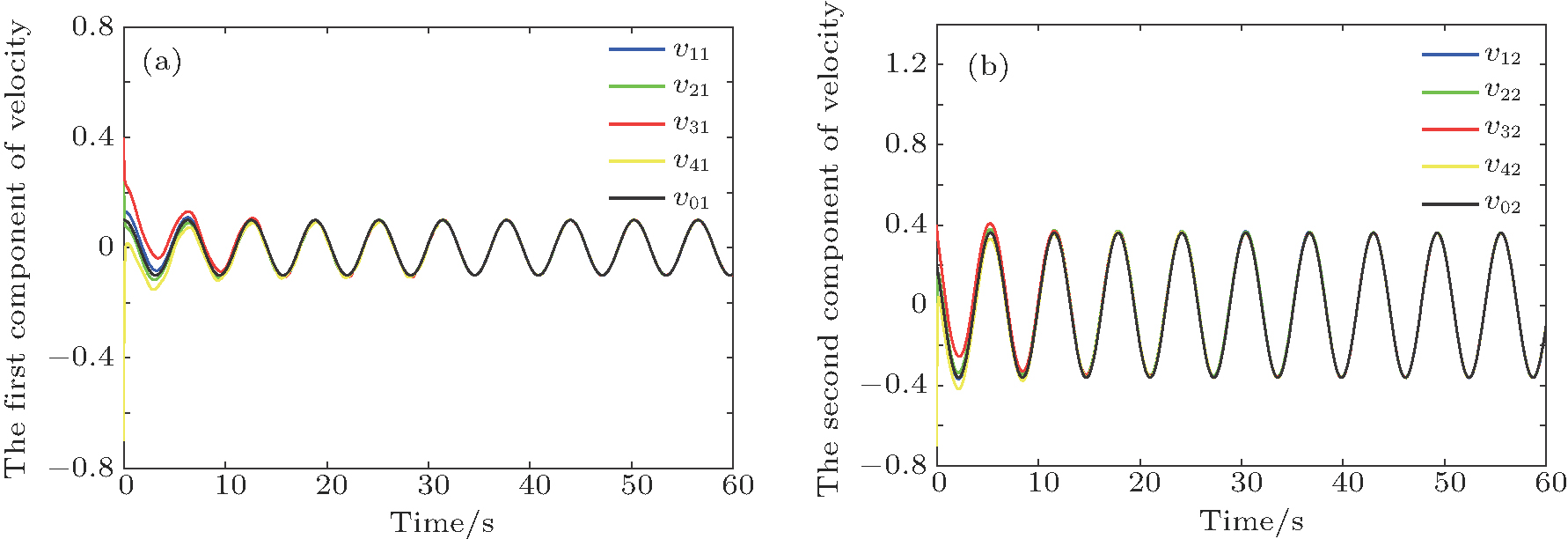
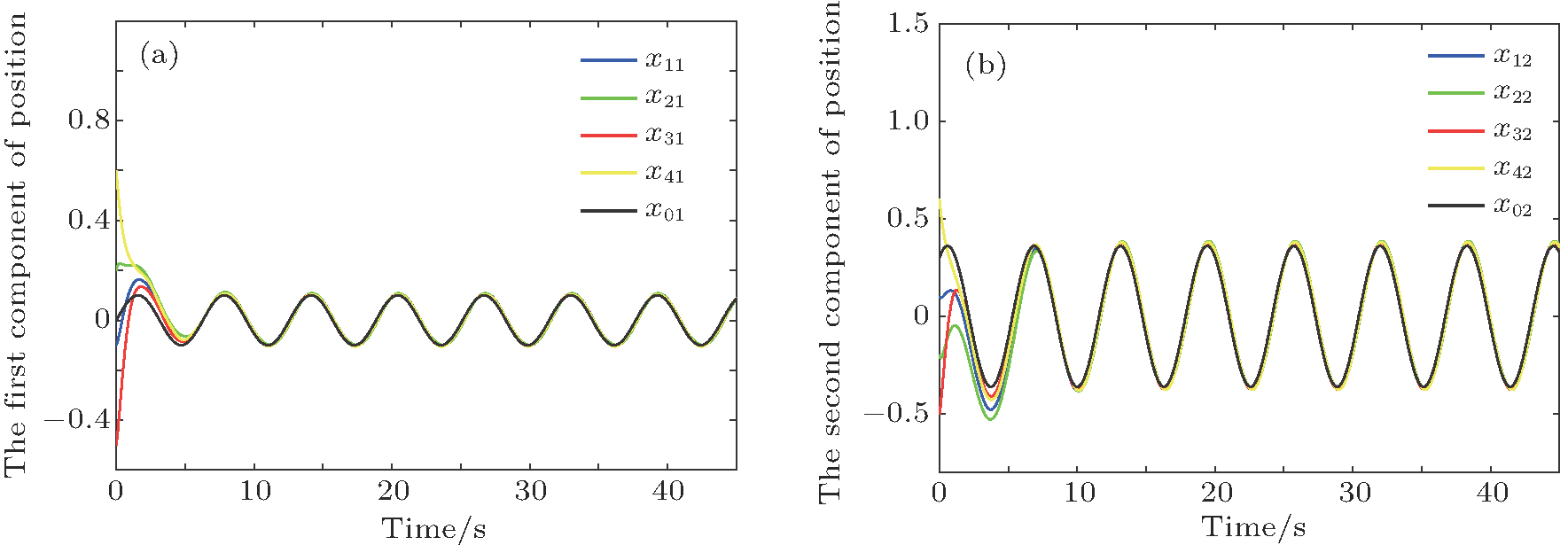
and  , i=1, 2, 3, 4, respectively, from which one observes that the state estimates generated from observer (3) converge to their real values fast and accurately in finite time. The position and velocity tracking trajectories of MAS based on linear sliding mode (5) are shown in figs. 4 and 5, respectively. It can be seen that the trajectory of each agent is convergent. Figures 6 and 7 describe the position and velocity tracking trajectories of dynamics via nonsingular terminal sliding mode (11), which can guarantee the states of the followers to converge to a small neighborhood of the leader in finite time.
, i=1, 2, 3, 4, respectively, from which one observes that the state estimates generated from observer (3) converge to their real values fast and accurately in finite time. The position and velocity tracking trajectories of MAS based on linear sliding mode (5) are shown in figs. 4 and 5, respectively. It can be seen that the trajectory of each agent is convergent. Figures 6 and 7 describe the position and velocity tracking trajectories of dynamics via nonsingular terminal sliding mode (11), which can guarantee the states of the followers to converge to a small neighborhood of the leader in finite time.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}