

{kind=link}
{kind=link}
{kind=link}
Effect of a force-free end on the mechanical property of a biopolymer — A path integral approach
[Zhou Zicong1, †,  , Joós Béla2]
, Joós Béla2]
, Joós Béla2]
|
|


† Corresponding author. E-mail:
Project supported by the MOST and the NSERC (Canada).
We study the effect of a force-free end on the mechanical property of a stretched biopolymer. The system can be divided into two parts. The first part consists of the segment counted from the fixed point (i.e., the origin) to the forced point in the biopolymer, with arclength Lf. The second part consists of the segment counted from the forced point to the force-free end with arclength ΔL. We apply the path integral technique to find the relationship between these two parts. At finite temperature and without any constraint at the end, we show exactly that if we focus on the quantities related to the first part, then we can ignore the second part completely. Monte Carlo simulation confirms this conclusion. In contrast, the effect for the quantities related to the second part is dependent on what we want to observe. A force-free end has little effect on the relative extension, but it affects seriously the value of the end-to-end distance if ΔL is comparable to Lf.
The conformational and mechanical properties of biopolymers have attracted considerable attentions owing to their importance in understanding the structure and function of biological materials.[1–29] In continuous elastic theory, a biopolymer is often modeled as a filament. The study of a filament has a long history dating back to Euler and Lagrange, and it has an increasing importance because it can be used to described the property of many microscopic objects such as biopolymers.[1–24,28] The simplest model for a biopolymer is the freely jointed chain (FJC) model and it is used to account for the conformational and mechanical properties of a flexible biopolymer. Another example is that the wormlike chain (WLC) model, which views the biopolymer as an inextensible chain with a uniform bending rigidity, has been used successfully to describe the entropic elasticity of a double-stranded DNA (dsDNA) or a semiflexible biopolymer.[1,4,5] Furthermore, the wormlike rod chain (WLRC) model, which is obtained by adding to the WLC model a term related to the intrinsic twist, has been used to explain the supercoiling property of dsDNA.[4,5,8] Owing to the importance of biopolymers, recently there has been a lot of works on the WLC and WLRC models as well as their modifications and extensions.
On the other hand, the path integral provides a powerful technique to study many physical phenomena. The basic idea of this technique can be traced back to Norbert Wiener, who introduced the Wiener integral to solve problems in the theory of diffusion and Brownian motion.[30] The complete method of the path integral was developed in 1948 by Richard Feynman,[31] with the original motivation to obtain a quantum mechanical formulation for the Wheeler–Feynman absorber theory. Since then, the path integral method has been applied widely to different areas in theoretical physics, including quantum field theory, solid state physics, statistical physics, polymer physics, and biophysics.[30–33] It has proved to be especially useful to describe the collective excitations in the theory of critical phenomena. This method often gives a simple way to obtain an exact solution for some physical problems. It also usually provides a solid foundation for the result obtained from other methods, to clarify the limits of their applicability and to indicate the way of finding corrections. For some realistic problems which are not exactly solvable, the path integral technique can help to build up a qualitative picture of the corresponding phenomenon and to develop some approximate methods of calculation.
For a time evolution system, the path integral is an analytic continuation of a method for summing up all possible trajectories of a moving body. It replaces the classical notion of a single, unique trajectory of a system with a sum over infinite possible trajectories to compute an amplitude or propagator. It is straightforward to see that a special configuration of a filament or a chain can be mapped into a trajectory of a moving body, with a replacement of the arclength of the filament by the time of the moving body. Therefore, it is straightforward to generalize the path integral technique to study the conformational and mechanical properties of a filament or a biopolymer.[4,10–12,14,16,21–23,30,32]
Traditional studies on the mechanical property of a filament usually assume that the external force or torque is applied exactly at one end of the filament. However, it is not easy to realize such a condition in a microscopic system so in practice the force is applied away from the end leaving a segment with a force-free end. Therefore, to have a complete understanding of the mechanical property of a microscopic filament, it is necessary to clarify the role of such a force-free end. In this paper we apply the path integral technique to answer this question.
The paper is organized as follows. In Section 2 we set up the two-dimensional (2D) model. Section 3 presents the results for the ground state. Section 4 makes a brief discussion in the configuration average. In Section 5 we present the results for the effect of the force-free end at finite temperature. Section 6 gives a brief discussion in the three-dimensional (3D) system. Finally, we end the paper with conclusions and discussions.
Many observations on semiflexible biopolymers are conducted in a 2D environment so that the property of biopolymers in 2D has attracted growing interest.[3,13,15–17,19,21,23,28] It is also relatively easier to find some exact results in a 2D system.[21,28] Therefore, we begin from a 2D system.
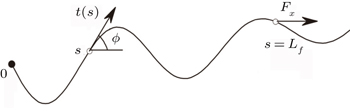
In two dimensions, the configuration of a filament is determined by a vector,
 | Fig. 1. Schematic diagrams of a curved filament showing the notation used. |
Applying a uniaxial force (along the x axis) Fx at s = Lf, we can write the reduced elastic energy of a filament as[17,19,21,23,28]




Extremizing E, we obtain the shape equation and boundary conditions (BCs) that govern the configuration of a filament in the ground state,


It is clear that when s ≥ Lf, ϕ(s) = ϕf + c̃s. Moreover, the equation with s ≤ Lf is exactly the same as that of a filament with L = Lf. The filament with L = Lf has been studied in detail and it is found exactly that at T = 0 and when c̃ ≠ 0, x(L) undergoes a multiple-step discontinuous transition with increasing force[21,28] for a long filament, i.e., when L ≫ 2π/c̃, regardless of k.
In statistical mechanics, at finite temperature a static macroscopic quantity B̄ is defined as the average with Boltzmann weight over all possible conformations. For a continuous system, the average becomes a path integral in the form[4,10–12,14,16,21–23,30–33]


In the realistic calculations, we can always arrange B[{ϕ(s)}] properly so that we can write it as B[ϕ,ϕn, …, ϕ1, ϕ0; s,sn, …, s1, s0] with L ≥ s ≥ sn ⋯ ≥ s1 ≥ s0, where ϕ ≡ ϕ(s), ϕk = ϕ(sk), k = 0,…,n. For instance, the end-to-end distance can be written as




Note that if C is dependent on ϕ or ϕ′, then equation (
From Eq. (
When f = 0, the exact distribution function, P(ϕ,s;ϕ′,s′) = P0(ϕ,s;ϕ′,s′) (s > s′), is found to be[23]


It is straightforward to show that (s ≥ s1 ≥ s′)

In experiment, usually ϕL is free so that we consider this case first.
In this case, using


Alternatively, we can use the standard path integral technique to discretize the functional integration in Eq. (
Equation (
To check the conclusions obtained from the path integral method, we discretize the model and perform the Monte Carlo simulation method with the Metropolis algorithm to study it in the off-lattice system. For convenience, we only simulate the system with constant k and c̃. In the discrete model, the filament is consisted of N straight segments of length l0 and joined end by end. The coordinates of two ends of the i-th segment are therefore {xi−1, yi−1} and {xi, yi} with x0 = y0 = 0. The external force is applied at the Nf-th segment. Replacing 


We have presented reports on the results with N = Nf (or L = Lf) for this model.[28] We found that if c ≠ 0 and at T > 0, zN undergoes a one-step first-order transition in the thermodynamical limit if the filament has a sufficiently large κ.
In this work we simulate the system with ΔN ≡ N − Nf > 0. We take c = 0, 0.1, 0.2, and 0.5 in this work. We set κ = 6 when c = 0 and 0.5; κ = 20 when c = 0.1; κ = 2 and 6 when c = 0.2. Nf = 50, 100, 200, and 300. ΔN = 2, 4, 6, 8, 10, 15, 20, 30, 40, and 50. The initial configurations are set randomly in this work. We equilibrate every sample for 106 Monte Carlo steps (MCS) before performing the averaging. The thermal average for a sample is taken to be 5 × 106 MCS. The MCS in this work are much less than that used in Ref. [28] since here we need only some qualitative results.
Some typical simulation results for zN are shown in Fig.
 | Fig. 2. zN versus F when κ = 6, c = 0.5 (black); κ = 2, c = 0.2 (red); and κ = 20, c = 0.1 (green). Nf = 300 in all cases. The lines (solid, dashed, dotted) are the systems with N = Nf and MCS = 3 × 108.[28] The black solid circle is for a filament with N = 315, the red empty-circle is for a filament with N = 320, and the green empty-square is for a filament with N = 310. MCS = 5 × 106 for circles and squares. Reduced units are used. |
In the same way as in the last section, when s > Lf, B̄ can be found in two steps






Replacing ΔL by L, 〈cosϕf〉 by cosϕ0, and 〈sinϕf〉 by sinϕ0, equation (

 | Fig. 3. 〈cosϕf〉2 + 〈sinϕf〉2 versus F for a filament when κ = 6, c = 0.5 (solid-circle); κ = 2, c = 0.2 (empty-circle); and κ = 20, c = 0.1 (solid-square). Nf = 300 in all cases. Reduced units are used. |
From Eq. (
We can find similar results for some other quantities. Especially, replacing ΔL by L, we can show that 



Intuitively, it is very difficult to apply a constraint on ϕL without an associated force, except for binding some parts of a filament to form loops. Evaluating the effect of loops is a rather complex task so we will not discuss it in this work. For simplicity, we only present some expressions for a constraint in the form of a Gaussian distribution in ϕL, to demonstrate the complicated nature of the problem. Fixing ϕL can be regarded as taking α → ∞, so we do not consider it separately. In this case




Again equation (
Similarly, when s > Lf, we can find


Again, since P0 and p(ϕ,s) are well known, it is possible to find a closed form for some quantities with complex expressions.
In the 3D case, the configuration of a filament can be described by a triad of unit vectors {

Applying a uniaxial force (along the z axis) Fz at s = Lf, we can write the reduced elastic energy of a filament with intrinsic curvatures ζ1(s), ζ2(s), intrinsic twist rates ζ3(s) and persistence lengths ai(s) as[12,14]

Again, a static macroscopic quantity B̄ is defined as a path integral

Similar to the 2D case, we can show exactly that when s ≤ Lf and with a free end at s = L,


In summary, using the path integral technique, at finite temperature, we show exactly that for a filament if we focus on the quantities related to s ≤ Lf, then we can ignore the force-free end completely. In this paper we consider a uniaxial force only, but it is straightforward to generalize this conclusion to more general cases. In contrast, if we are interested in the quantities related to s > Lf, then the importance of a force-free end is quantity-dependence. A force-free end has little effect on the relative extension. But if ΔL is comparable to Lf, then a force-free end affects seriously the value of the end-to-end distance. Our conclusions are valid in both 2D and 3D, regardless of bending rigidity, intrinsic curvatures and intrinsic twist rates.
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 | |
| 21 | |
| 22 | |
| 23 | |
| 24 | |
| 25 | |
| 26 | |
| 27 | |
| 28 | |
| 29 | |
| 30 | |
| 31 | |
| 32 | |
| 33 |