{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Stability analysis of traffic flow with extended CACC control models
[Zheng Ya-Zhou1, Cheng Rong-Jun2, 4, Lo Siu-Ming3, Ge Hong-Xia2, 4, †,  ]
]
]
|
|


† Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant Nos. 71571107 and 11302110). The Scientific Research Fund of Zhejiang Province, China (Grant Nos. LY15A020007, LY15E080013, and LY16G010003). The Natural Science Foundation of Ningbo City (Grant Nos. 2014A610030 and 2015A610299), the Fund from the Government of the Hong Kong Administrative Region, China (Grant No. CityU11209614), and the K C Wong Magna Fund in Ningbo University, China.
To further investigate car-following behaviors in the cooperative adaptive cruise control (CACC) strategy, a comprehensive control system which can handle three traffic conditions to guarantee driving efficiency and safety is designed by using three CACC models. In this control system, some vital comprehensive information, such as multiple preceding cars’ speed differences and headway, variable safety distance (VSD) and time-delay effect on the traffic current and the jamming transition have been investigated via analytical or numerical methods. Local and string stability criterion for the velocity control (VC) model and gap control (GC) model are derived via linear stability theory. Numerical simulations are conducted to study the performance of the simulated traffic flow. The simulation results show that the VC model and GC model can improve driving efficiency and suppress traffic congestion.
The modern traffic system is one of the most important symbols of social modernization. Nevertheless, traffic problems such as the pollution of fog and haze, traffic congestion and fuel consumption have influenced human daily life. To address these problems, there has been a lot of studies on capturing the complex mechanisms behind the phenomena of vehicular traffic flow from the microscopic or macroscopic viewpoints. Consequently, various driving assistant systems, such as adaptive cruise control (ACC) and cooperative adaptive cruise control (CACC), have been introduced over recent decades to improve driving efficiency and safety. Studies have been done on investigating the mechanism of traffic flow as much as possible, and some interesting results have been acquired.[1–5]
To date, some regional traffic signal control systems have been used to enhance driving efficiency since the 1960s. The early Urban Traffic Control System (UTCS) project was completed in the US. Afterwards, the Split, Cycle and Offset Optimization Technique (SCOOT) was developed by the Transport and Road Research Laboratory (TRRL) in the UK.[6] Now, this system has been introduced in several cities of China due to its good performance in application. Sydney Coordinated Adaptive Traffic System (SCATS) was developed by New South Wales Roads and Transport Authority (NSWRTA) in Australia.[7] These systems have been successfully introduced to improve traffic conditions.
Many car-following models have been proposed to investigate traffic behaviors on a single lane without overtaking.[8–10] The early linear car-following model is presented by Chandler et al.,[11] and a nonlinear model is put forward by Pipes.[12] Newell[13] extended a car-following model with a differential equation and gave a graphic description of the optimal velocity (OV) function. Konishi et al.[14] proposed the famous chaotic car-following model by setting the time delay feedback control signals, and provided further results through theoretical analysis. Subsequently, Bando et al.[15] presented the classical microscopic traffic model called optimal velocity model (OVM). Later, much work has been done based on the optimal velocity model by introducing multiple comprehensive information into relative velocity or headway in various ways.[16–20]
As a famous traffic control system, the adaptive cruise control(ACC) system allows drivers to keep a suitable headway or velocity with respect to the preceding vehicle based on the sensor devices.[21] Studies have shown that traffic jams can be suppressed in the mixed traffic of human-driven cars with the adaptive cruise control cars constituting at least 20% of the traffic flow.[22] To further improve highway throughput and safety, cooperative adaptive cruise control system was introduced in 1997 to integrate the adaptive cruise control system and wireless communication. Later, many studies have shown the advantages of using signals received from multiple cars farther ahead.[23–25]
The cooperative adaptive cruise control system, which can receive more comprehensive information from multiple vehicles ahead via vehicle to vehicle communication or radar sets, has gained more and more interest of scholars. So far, many studies have been done in this research field. Tang et al.[26] proposed an improved car-following model considering inter-vehicle communication and extended the OV model by taking account of the effect of the driver’s memory. Based on the full velocity difference (FVD) model, Peng and Sun[27] presented a car-following model considering multiple preceding cars’ information in 2010. Li et al.[28] investigated the intelligent driver model and carried out its numerical simulation under the open boundary condition. All in all, much literature has shown the great potential and broad prospects of the cooperative adaptive cruise control system to suppress traffic congestion.
Up to the present time, much work has been done on the traffic with ACC/CACC vehicles.[29,30] Nevertheless, there is little study of the CACC system from the viewpoint of control methods. Moreover, the safety distance should be related to the velocity of the considered car. In this study, some vital comprehensive information, such as multiple preceding cars’ speed differences and headway, variable safety distance (VSD) and time-delay effect are investigated. Further details are given in Section 2 and Section 3.
The organization of this paper is as follows: In Section 2, a comprehensive control system which can handle three traffic conditions to guarantee driving efficiency and safety is designed. In Section 3, the stability criterion for VC model and GC model are obtained by using linear stability theory. In Section 4, numerical simulations are carried out to validate the theoretical results. Some conclusions are given in Section 5.
The existing car-following models can be formulated as follows

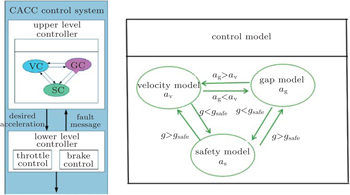
To better study the car-following mechanisms in the cooperative adaptive cruise control (CACC) system, an improved control system considering more comprehensive information is presented, which consists of three models: (i) velocity control (VC) model, (ii) gap control (GC) model, and (iii) safety control (SC) model. The longitudinal control system is typically designed as a hierarchical two level controller. The upper level controller is determined by the desired acceleration while the lower level controller is determined by the throttle or brake commands required to track the desired acceleration.[31] In this paper, we also adopt a hierarchical two-layer controller for CACC as shown in Fig.
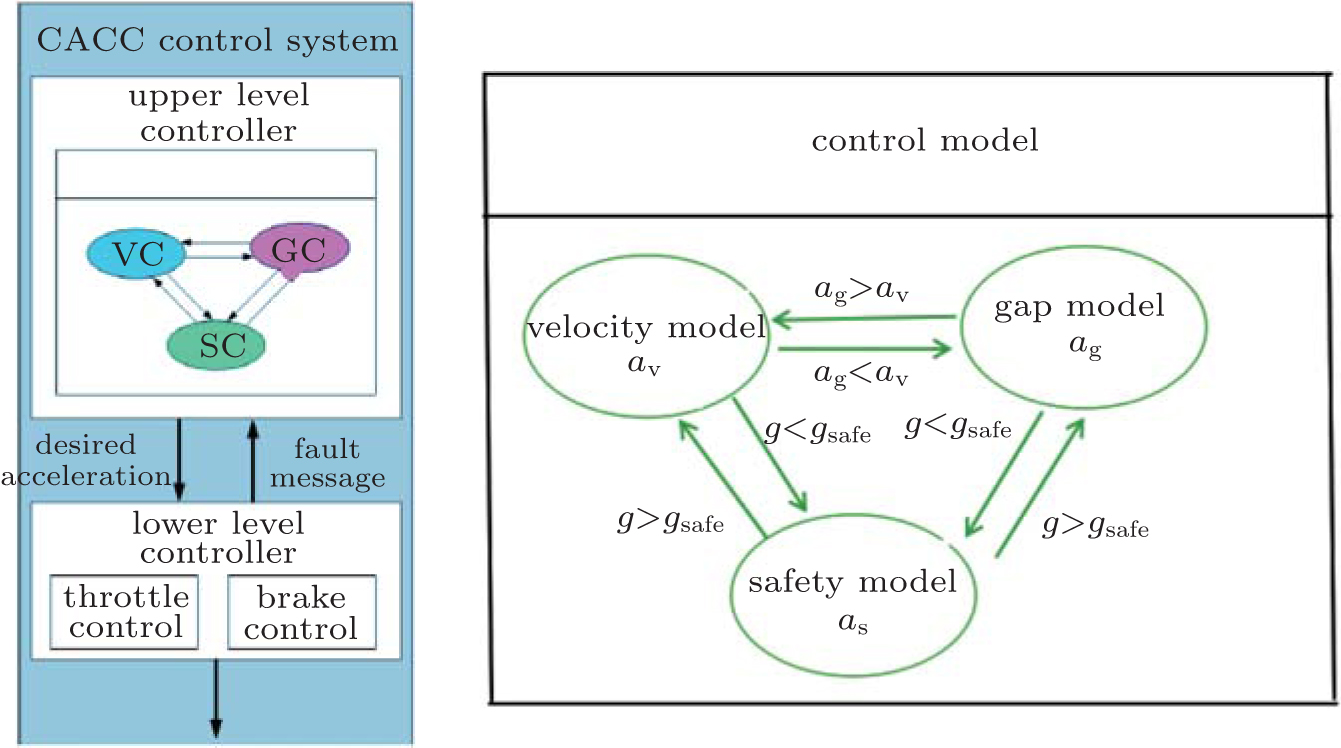 | Fig. 1. The controller and the diagram of interaction between the three control models. |
The VC control model can capture multiple preceding cars’ headway and velocity difference based on sensor devices. So, vehicles can maintain the desired velocity 
The velocity control model considering multiple preceding cars’ headway and speed differences is constructed. The intended acceleration for this model can be expressed as follows





Vehicles will operate in GC model when following a close-by preceding car. This model is designed to maintain a space with constant time gap to its preceding car. In addition, preceding vehicle acceleration an+1 is also available through wireless communication. Thus, the desired acceleration in gap control mode is proposed by

When the space gap is smaller than the safe gap (g < gsafe), the vehicle will switch to SC model. The function of SC model is to avoid vehicle collisions by applying the maximum deceleration. The safe gap gsafe is determined by velocity and maximum deceleration ability of the current and the preceding vehicle.


In this section, we mainly focus on stability of the VC model and the dynamic equation is rewritten as follows

Applying the time delay τ of lower level controller as a first order lag, we have desired acceleration ades, that is

Under this condition, the dynamic equation (
Then, traffic system (



The Laplace transform for Eq. (


Substituting Eq. (





In reality, a small disturbance will not magnify through vehicle streams, if the polynomial p(s) is stable and ‖G(s)‖∞ ≤ 1. |G(jw)| must be smaller than one for all positive w2 to ensure string stability. As the local stability of p(s) can be maintained for the improved model under the condition (
In this section, we rewrite the dynamics equation of new GC model from the perspective of the control system as follows:
In this model, the intended acceleration of CACC is given by Eq. (

Similar to the theoretical analysis of the last part, after Laplace transform for traffic system (


In reality, the traffic jams will be weakened on the condition that the characteristic function p̄(s) is stable and ‖Ḡ(s)‖∞ ≤ 1 according to the control theory. Then, we can get the criterion for local stability, that is

As |Ḡ(jw)| must be smaller than 1 for all positive w2 to ensure string stability, the stability criterion of the CACC mode is given by


In this simulation, several numerical simulations are carried out to verify the model by simulating the real traffic flow. We just consider some simple situations for the presented models. The parameters for the vehicles are set as Ksc = 2 s−1, d = 0.5, v* = 15 m/s, y* = 5.5 m, vmax = 20 m/s, and T = 0.1 s. It is assumed that all vehicles have the same parameters in the traffic system. Particularly, in Fig. 
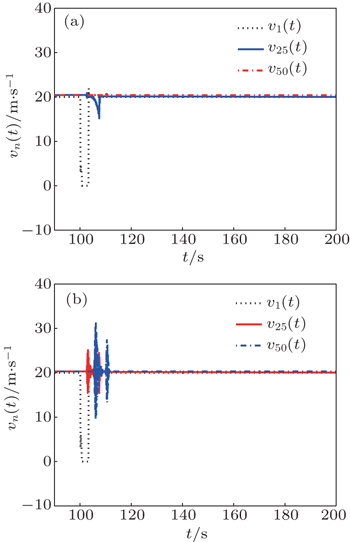
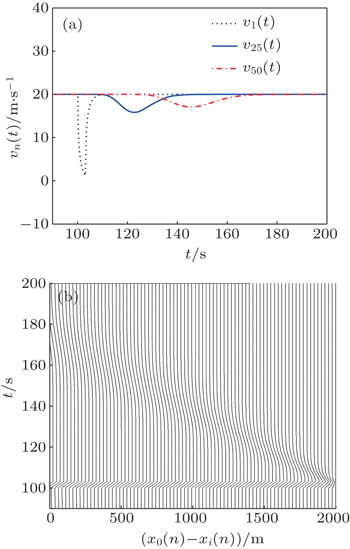
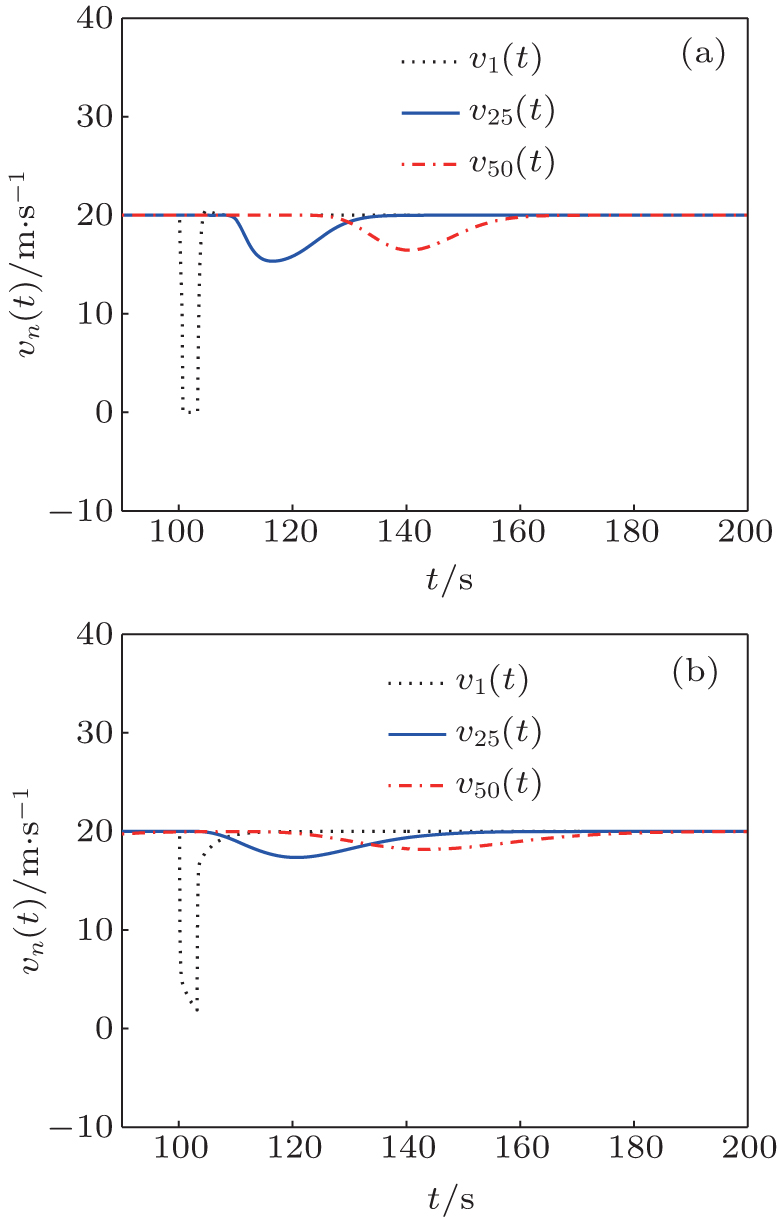
 | Fig. 2. Numerical simulations for the VC model with (a) τ = 0.25, (b) τ = 0.5. |
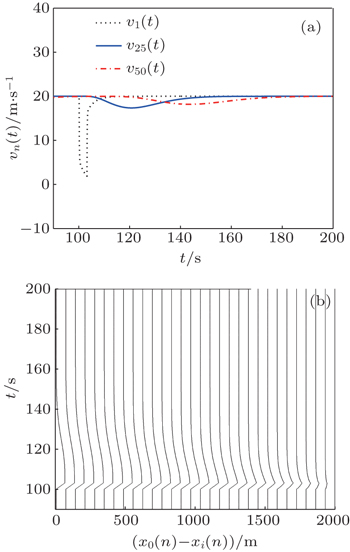
 | Fig. 3. Numerical simulations for the VC model with (a) vmax = 21.5 m/s, (b) vmax = 20.5 m/s. |
Figure
Figure
The simulation results in Fig.
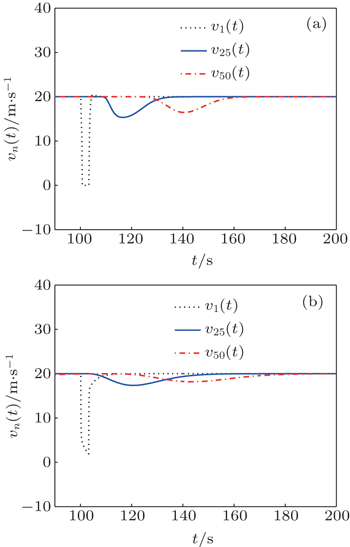
 | Fig. 4. Numerical simulations for the VC model with (a) τ = 0.25, γ = λ = 2, (b) τ = 0.25, γ = λ = 3. |
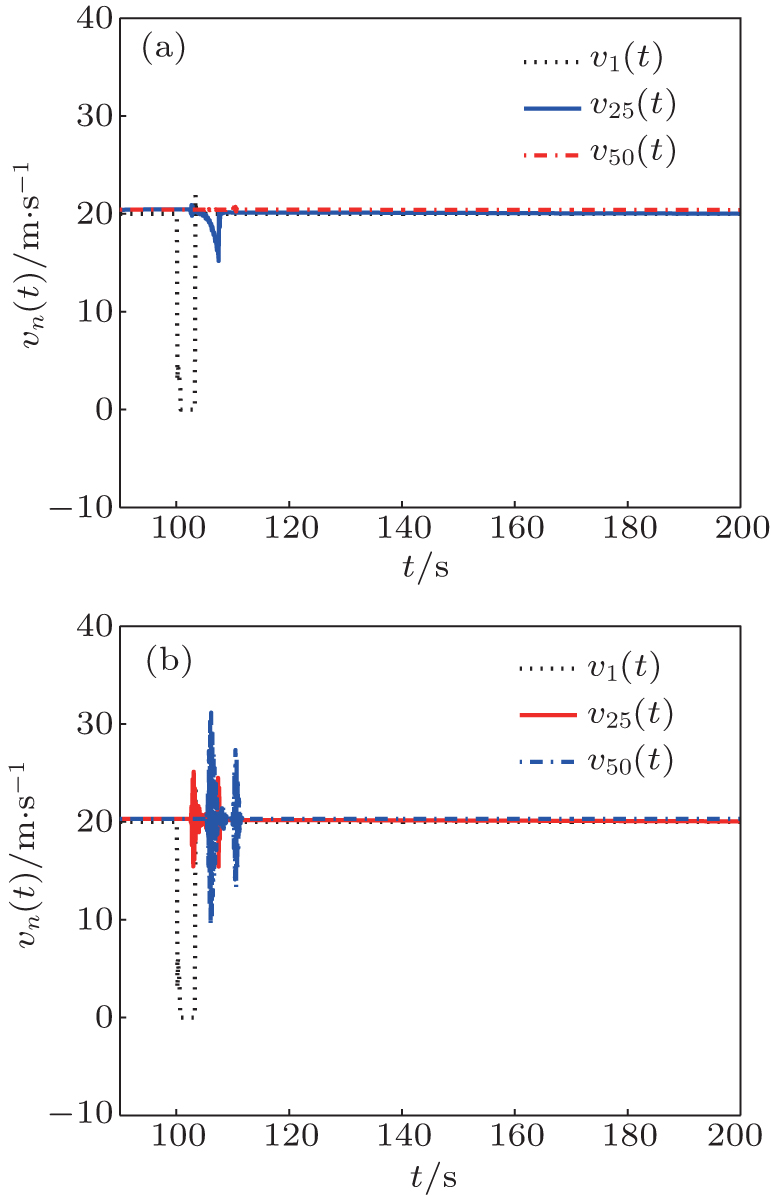
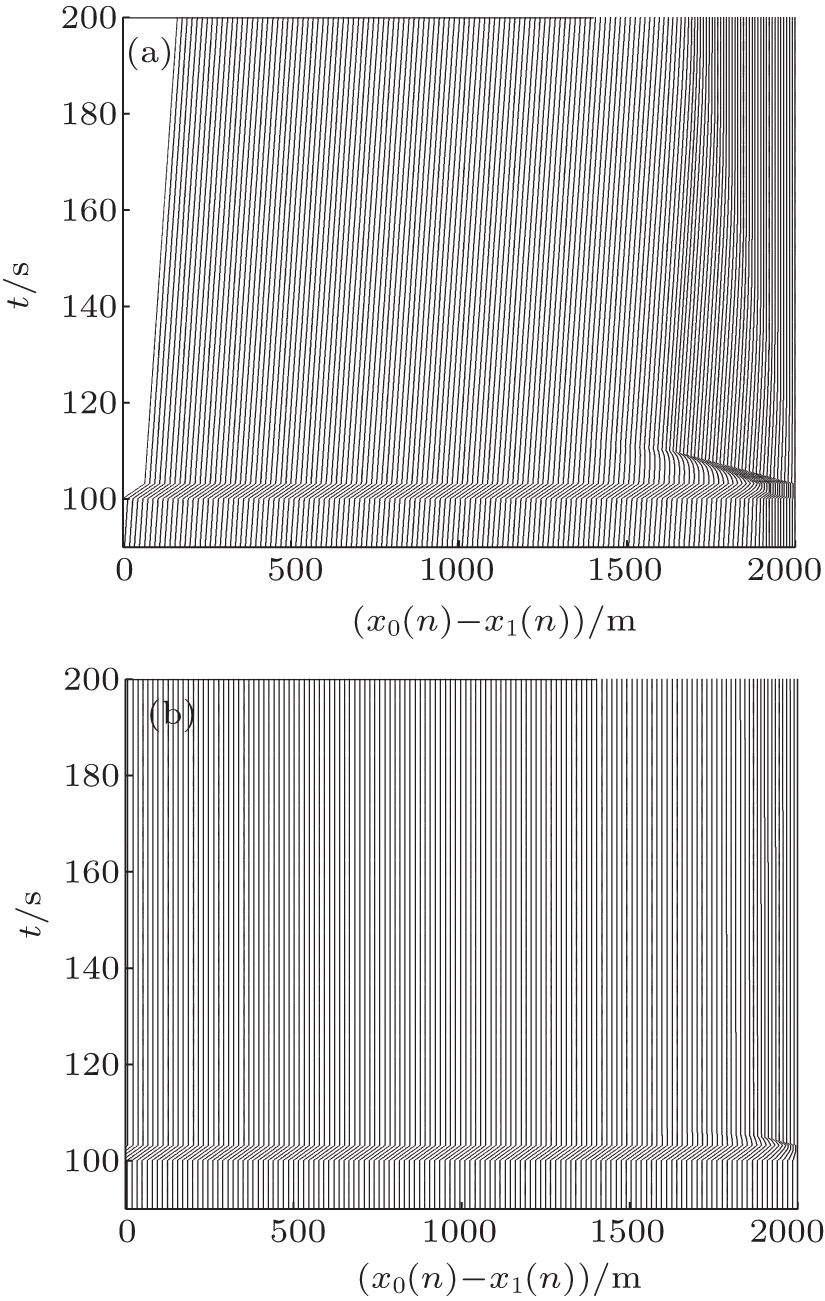
Now we consider the system with GC control model. The simulation results in Fig.
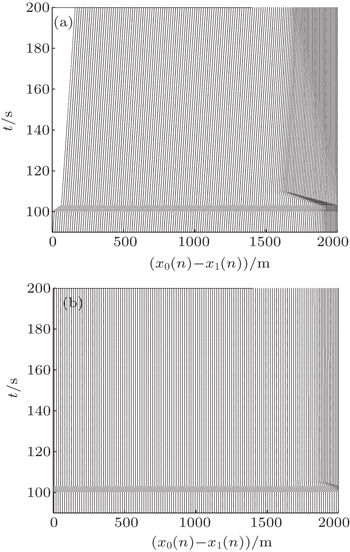
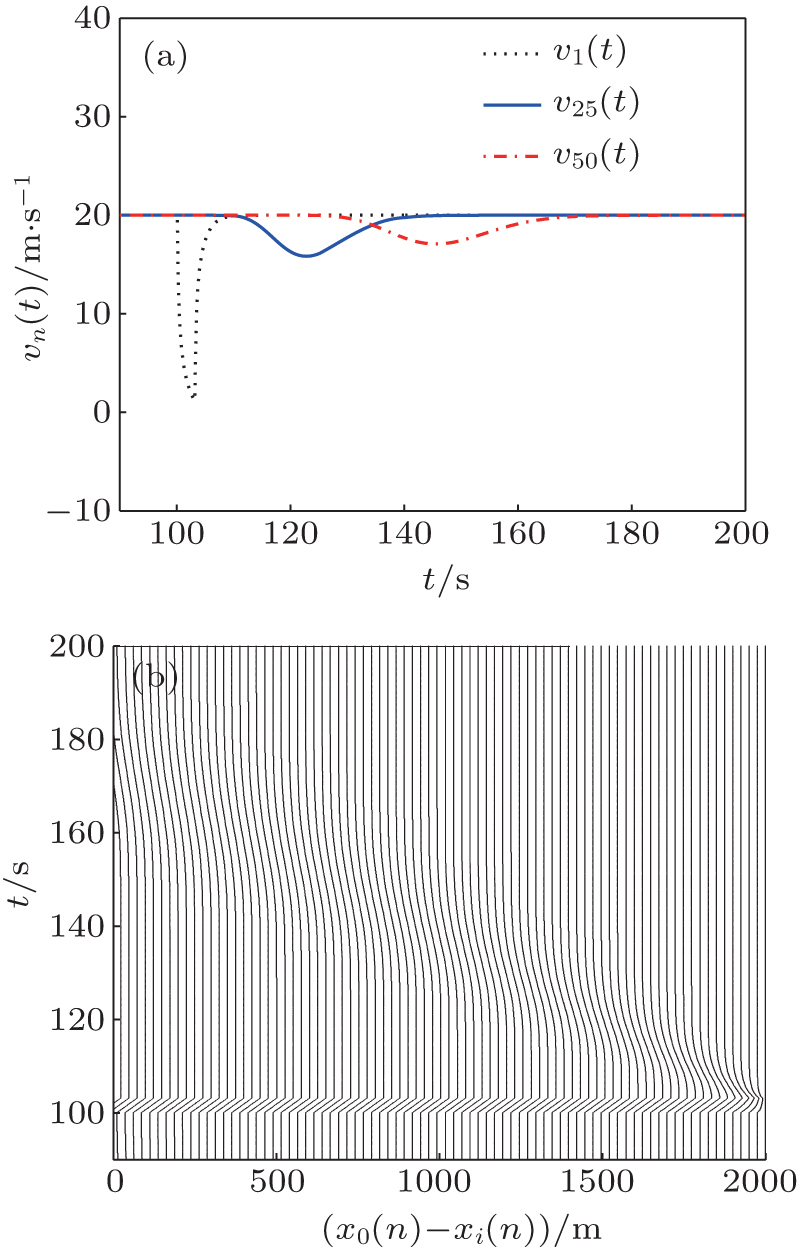 | Fig. 5. (a) Space-time plot of the traffic system. (b) Temporal velocity behavior of the 1st, 25th, and 50th vehicles. (Kv = 0.85, Kg = 0.8, Ka = 0.35, τ = 0.25 s). |
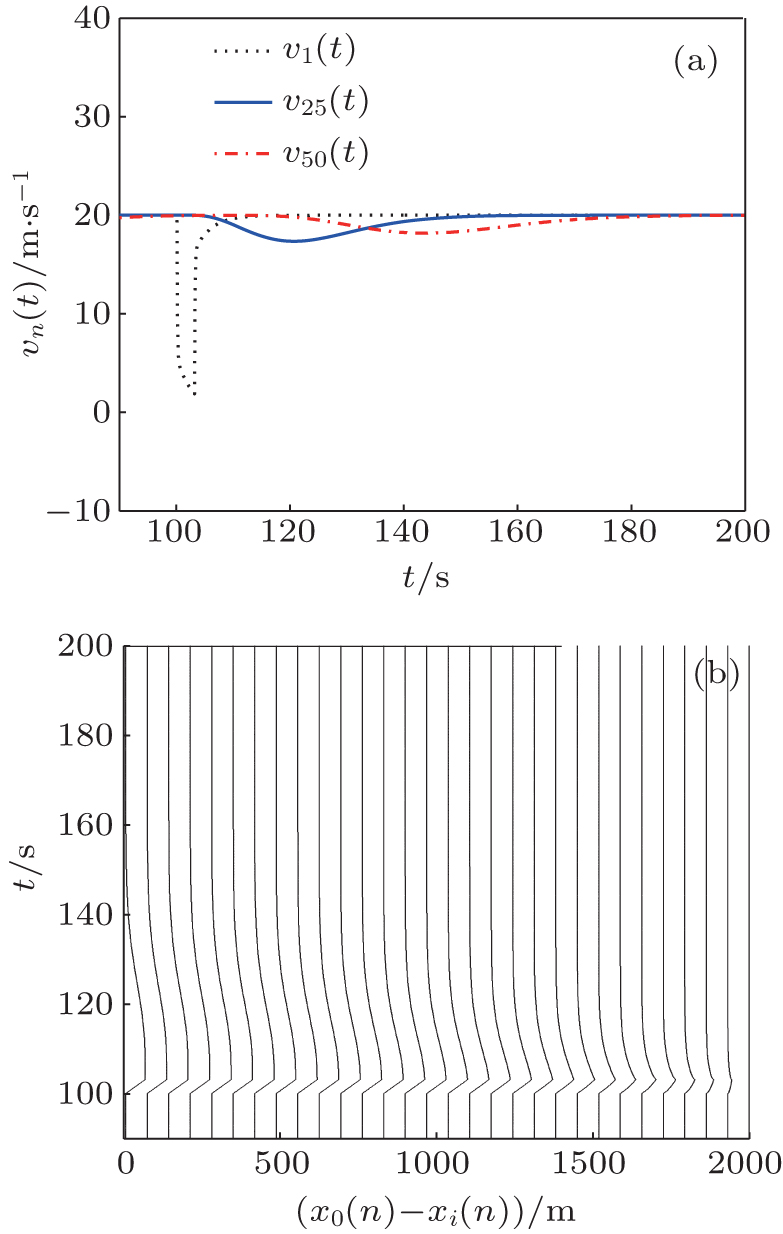 | Fig. 6. (a) Space–time plot of the traffic system. (b) Temporal velocity behavior of the 1st, 25th, and 50th vehicles. (Kv = 0.85, Kg = 0.8, Ka = 0.75, τ = 0.25 s). |
Based upon the above simulation results, it can see that the extended control system considering more comprehensive information from multiple preceding vehicles ahead can suppress the increasing traffic jams and enhance traffic safety.
In this study, a comprehensive control system which can handle different traffic conditions to guarantee driving efficiency and safety is designed based on the classical cooperative adaptive cruise control theory. In this control system, some vital comprehensive information (such as multiple preceding cars’ speed differences and headway, variable safety distance (VSD) and time-delay effect) have been investigated. The stability criterion for the VC model and GC model are derived via linear stability theory. Several simulations are carried out to verify the model by simulating the real traffic flow, and the results prove that the extended control system can suppress traffic jams and enhance traffic safety.
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 | |
| 21 | |
| 22 | |
| 23 | |
| 24 | |
| 25 | |
| 26 | |
| 27 | |
| 28 | |
| 29 | |
| 30 | |
| 31 |