










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Estimation of sea clutter inherent Doppler spectrum from shipborne S-band radar sea echo
Cite this Article
Zhang Jin-Peng, Zhang Yu-Shi, Xu Xin-Yu, Li Qing-Liang, Wu Jia-Ji. Estimation of sea clutter inherent Doppler spectrum from shipborne S-band radar sea echo. Chinese Physics B, 2020, 29(6): 068402 
Permissions
Estimation of sea clutter inherent Doppler spectrum from shipborne S-band radar sea echo
† Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant No. 61801446).
Abstract
Measurement of shipborne radar sea echo is instrumental in collecting the sea clutter data in open sea areas. However, the ship movement would introduce an extra Doppler component into the spectrum of the sea clutter, so the sea clutter inherent spectrum must be estimated prior to investigating the sea clutter Doppler characteristics from the shipborne radar sea echo. In this paper we show some results about a shipborne sea clutter measurement experiment that was conducted in the South China Sea in a period between 2017 and 2018; abundant clutter data have been collected by using a shipborne S-band clutter measurement radar. To obtain the sea clutter inherent Doppler spectrum from these data, an estimation method, based on the mapping relationship between the shipborne clutter spectrum and the inherent clutter spectrum, is proposed. This method is validated by shipborne clutter data sets under the same measuring conditions except for the ship speed. Using this method, the characteristics of the Doppler spectrum lineshapes in the South China Sea are calculated and analyzed according to different sea states, wave directions, and radar resolutions, which can be instrumental in designing the radar target detection algorithms.
1. Introduction
The Doppler spectrum of radar sea clutter refers to the Fourier transform of the autocorrelation function of the radar sea echo in a single radar range gate, that is, it is a power spectrum essentially.[1] The sea clutter spectrum is closely related to the scattering mechanism of sea wave,[2,3] thus it depends not only on the radar parameters but also on the spatial structure of the sea surface, which can be described by the wave height, wave direction, wave period, etc.[4] The different velocity components of the sea wave make the sea clutter spectrum have a mean shift and a bandwidth, which change with time variation and space variation of sea surface.
When searching for sea-skimming targets and during horizon searches, radars can encounter sea clutter in a variety of extreme weather conditions. For the coherent pulsed Doppler and MTI radars, the understanding of the sea Doppler characteristics is very conducible to predicting their performance correctly.[5,6] Therefore, continuous effort has been made to analyze the Doppler spectra of the sea clutter in various circumstances. Early in 1968, Pidgeon[7] investigated the Doppler dependence of radar sea clutter based on C-band clutter data and found the difference in Doppler characteristics between horizontal-polarization clutter and vertical-polarization clutter. Subsequently, Lee et al.[8] concentrated on exploring the different components of the Doppler spectra, which were induced by different sea surface scattering mechanisms. They have suggested that the Doppler spectrum of the radar sea clutter could be represented by the combination of several physically motivated basis functions, describing both Bragg and non-Bragg scattering mechanisms. Walker[9] presented a three-component model for the Doppler spectra of low grazing angle radar sea echoes, based on the findings of a laboratory wind-wave tank experiment. Lamont–Smith[4,10] focused on the explanation of the frequency and angle behaviors of the Doppler spectrum from the perspective of sea surface scattering mechanisms. In this century, Rosenberg and Watts et al.[11–14] have systematically analyzed the Doppler characteristics of the radar sea clutter measured under different radar parameters, different sea states, and different measuring geometries.
In general, the statistical properties of the wave height vary considerably in different maritime areas; thus, the Doppler characteristics of the radar sea clutter differ remarkably.[15] For example, according to our early qualitative research results of the sea clutter characteristic difference in various sea areas, it is indicated that the Doppler spectra in the South China Sea show larger bandwidths and have more sub-peaks than in Yellow Sea; this may be due to a larger depth and a faster current of the South China Sea. Therefore, it is of great significance to study the sea clutter Doppler spectra in different maritime areas. From 2017 to 2018, a long-term experiment for multiple sea states, aiming to collect the radar sea clutter data of the South China Sea, was carried out by China Research Institute of Radiowave Propagation (CRIRP). In the experiment, a shipborne S-band clutter measurement radar (SSCMR) was fixed on the “Qiongsha 3” ship to measure the sea echo, and an ultrasound micrometeorological observation system was installed to collect the environmental data. The data collected provided a sound basis to investigate the Doppler characteristics of the radar sea clutter in the South China Sea.
This paper focuses on the experimental description of clutter collection and the estimation method of the sea clutter inherent Doppler spectrum. Because SSCMR measures the clutter data, the Doppler spectrum, if directly estimated from the clutter data, contains the Doppler component introduced by the ship movement. Therefore, to select the inherent Doppler spectrum of the sea clutter, which is mainly a result of the sea wave motion, the authors proposed a procedure in which used are the spectral formula of the sea clutter measured on ship platforms and a method of estimating the sea clutter inherent Doppler spectrum. Based on that procedure, the authors have analyzed the Doppler characteristics of the S-band sea clutter in the South China Sea for different sea states, wave directions, and radar resolutions. The results can be beneficial to designing the radar target detection algorithm in the corresponding sea area.
2. Clutter measurement experiment
2.1. Overview of experiment
The clutter measurement experiment has been conducted by CRIRP in a period between January 2017 and March 2018 in the South China Sea. To acquire the sea clutter data in the open sea, the SSCMR was installed on a supply ship “Qiongsha 3.” This ship has been traveling between Hainan Province and Xisha Islands of China irregularly; therefore, the sea clutter was measured during the ship navigating.
The “Qiongsha 3” is 84-m-long and 13.8-m-wide, with a displacement of about 2500 tons, and it is shown in Fig.
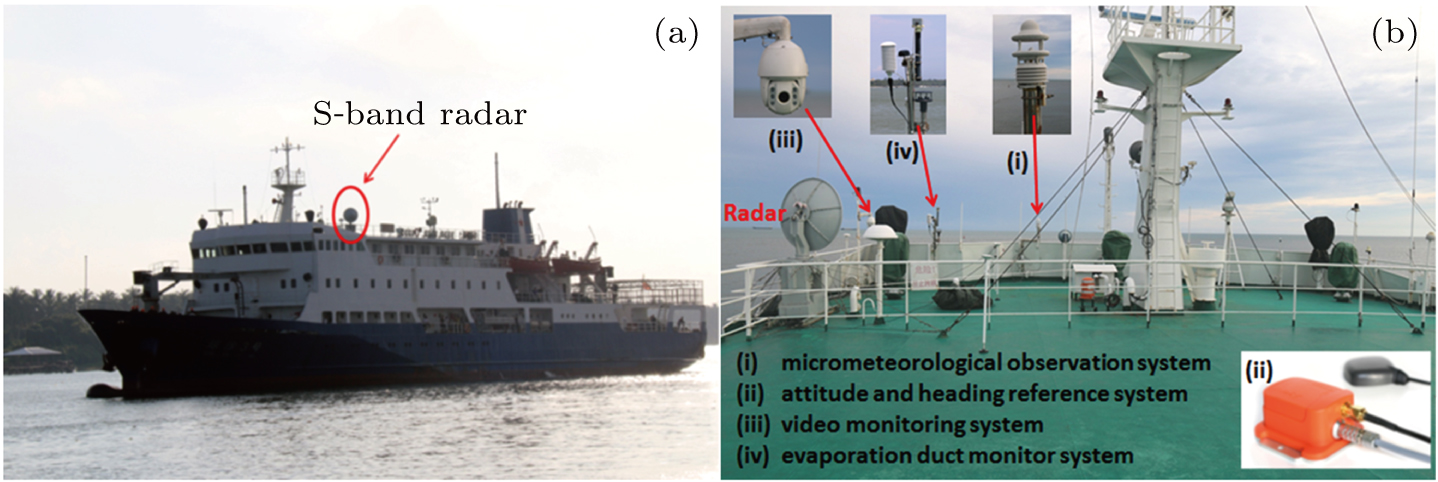 | Fig. 1. Scene of shipborne sea clutter measurement system, showing (a) “Qiongsha 3” ship and (b) instruments mounted on deck. |
The four other instruments installed on the ship deck as shown in Fig.
2.2. Radar system and data
The SSCMR system was equipped with a high-precision stabilization platform to maintain the stability of the radar beam pointing. By using a steerable pedestal, it was possible to conveniently steer the antenna in 360° azimuth and from 90° to –10° in elevation. The radar is a coherent, polarimetric system having 16 frequency points ranging from 3100 MHz to 3400 MHz, in steps of 20 MHz. In this study, we have used 3200-MHz frequency to measure the sea clutter. The radar design comprises four chirp bandwidths: 2.5, 5, 10, and 20 MHz, resulting in range resolutions of 60, 30, 15, and 7.5 m, respectively. Such a setup enables the investigation of the clutter in different radar resolutions. There are 794 range cells, corresponding to a maximum sampling distance of 5955 m. The detailed list of SSCMR parameters can be found in Table
| Table 1. Main parameters of SSCMR. . |
During the two years of experimenting, having 18 voyages in total, many trials of the measurement have been carried out; the average radar measurement time was about 30 h per voyage. The acquired valid sea clutter data contained about 10784 sets or 6954 GB; the sea conditions varied from 2 to 5 (sea state scale, World Meteorological Organization). According to the sea state of each voyage and the number of data sets per voyage, the shares of the data volume with sea states 2, 3, 4, and 5 were about 33%, 23%, 32%, and 13%, respectively; there were relatively little data for sea state 5. The wave directions included upwave, downwave, and crosswave.
Figure
 | Fig. 2. Range–pulse intensity plots of sea clutter in sea state of (a) 2, (b) 3, (c) 4, and (d) 5. |
3. Method of estimating sea clutter inherent spectra
3.1. Spectral formula of sea clutter measured on ship platform2 ) can be simplified by
2 ) can be rewritten as
5 ) shows that the sea clutter Doppler spectrum of a moving platform can be represented by the convolution of the sea clutter inherent Doppler spectrum and the radar antenna two-way beam pattern.5 ).
8 ) can have different simplified forms under different conditions. In the case of the radar antenna with a narrow beamwidth (for example, the beamwidth of SSCMR is 5.3° in this paper), if the azimuth angle of the radar beam is large enough, which makes the velocity vector not included in the main radar beam (i.e., | φ | > θb/2), the expression of the Doppler bandwidth induced by the ship movement given by Eq. (8 ) can be simplified into
In the case of a shipborne radar looking at the sea surface, if the position of the scatterer on the sea surface is represented by (rl,θm), the velocity is represented by (vrl, vθm), where(l,m) are the position indices in the slant-range and azimuth direction. The total sea clutter return measured by the radar in the spatial frequency (kr,k{θ) domain can be written as

Based on the expression of the sea clutter intensity given by Eq. (



By transforming the spatial frequency kθ into the Doppler frequency f, the power spectral density is given by Eq. (

The antenna beam pattern is a function of the azimuth angle, which is in the Gaussian form and can be expressed as

Figure
 | Fig. 3. Geometry of shipborne radar beam. |
According to the geometry shown in Fig.

In calculating the Doppler bandwidth induced by the ship movement, we consider three scattering points P1, P2, P3 on the sea surface, with all points being equally distant from the radar as shown in Fig.



3.2. Estimation method
The sea clutter Doppler spectrum measured by a moving ship-based platform is widened by the aspect dependent Doppler spread due to the antenna beam pattern, so it is referred to as the sea clutter “spread” spectrum in this paper. The above subsection gives the mapping relationship between the spread spectrum and the sea clutter inherent spectrum determined by the wave movement. If the inherent spectrum is known, and the relevant parameters such as moving velocity, radar pointing direction, radar beamwidth, and grazing angle are given, the spread spectrum is easily calculated through the convolution given by Eq. (
Based on Eq. (
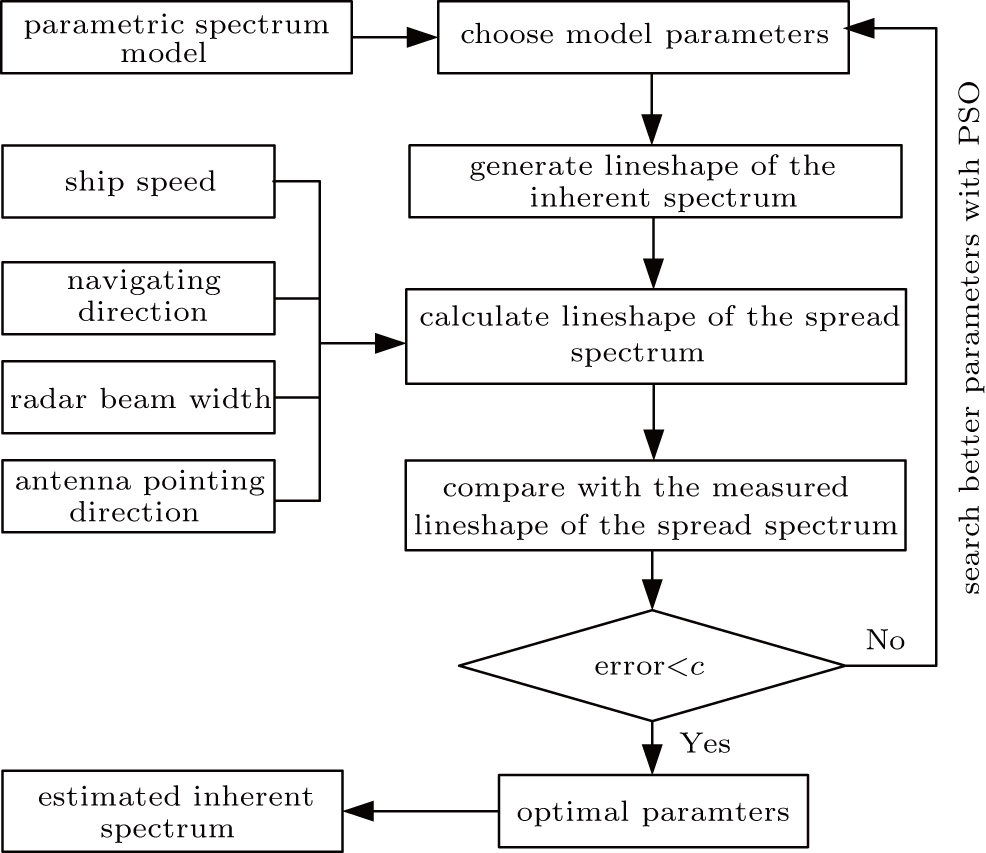 | Fig. 4. Estimation process of sea clutter inherent spectrum. |
The ability of the Doppler model to describe the actual sea clutter Doppler spectrum determines the quality of the estimated shape of the inherent spectrum.[17] In the modeling of the sea clutter Doppler spectrum, the Walker model[9] and Ward model[18] are two widely accepted and used models. Here in this work, the Walker model is adapted to describe the Doppler spectrum with the observation time longer than the period of the gravity sea waves (generally several seconds), which belongs to a long-time Doppler spectrum model. The Ward model is adapted for describing the Doppler spectrum with the observation time shorter than the period of the gravity sea waves but longer than the decorrelation times between the burst and whitecap scattering, which belongs to a short-time Doppler spectrum model.
The above two models have certain limitations in coping with the real sea clutter Doppler spectrum, so we use a suggested time-varying Doppler spectrum model for estimating the sea clutter inherent spectrum. This model is developed based on both the Walker model and Ward model. Thus, the real spectrum is described better by considering three different scattering mechanisms. The formula of the model can be written as





In the estimation process of the sea clutter inherent spectrum, nine parameters are required to be optimized by PSO, they are IB, IW, IS, wB, wW, wS, fB, fG, and Δ fs. Their initial values are chosen as random numbers between xmin and xmax, which represent the possible minimum and maximum values of each parameter. The possible values are determined by analyzing the real spread spectrum of the shipborne sea clutter.
3.3. Validation of estimation method
The method of estimating the sea clutter inherent Doppler spectrum was validated by the sea clutter data measured by SSCMR in the South China Sea in this section. The estimation process was as follows. First, we have chosen two sea clutter data sets with the same radar parameters, but one data set was acquired for the moving ship, and another data set was measured when the ship was static. To control the same sea conditions, the measurement time and sea area for the two data sets were made nearly equal. Secondly, based on the clutter data measured during the ship movement, we obtained the sea clutter spread spectrum by the Welch method, and then estimated the sea clutter inherent spectrum by using the method in this study. Finally, we have compared the estimated inherent spectrum with the Doppler spectrum yielded from the sea clutter data measured in the ship static state. If the two spectrum lineshapes have a good fit, it provee that the estimation method is valid.
Three validation tests were performed to evaluate the estimation method. Each test used two typical sets of clutter data: one corresponded to the static state of the ship and the other to the ship’s moving state. The measuring conditions of all the test data are given in Table
The comparisons among the sea clutter Doppler spectra measured by a moving ship-based platform, by a stationary ship-based platform, and the estimated clutter inherent spectrum are shown in Fig.
 | Fig. 5. Comparison between clutter inherent spectrum and stationary platform clutter spectrum for range gate 190. |
| Table 2. Measuring conditions of sea clutter data. . |
| Table 3. Estimation errors (in unit Hz) of Doppler parameters of clutter inherent spectrum. . |
To evaluate the accuracy of the estimation method quantitatively, the estimation errors of the Doppler mean shift and bandwidth for the three tests were calculated, and are shown in Table
4. Characteristics of Doppler spectrum lineshapes
Based on the method of estimating the sea clutter inherent spectrum given in the previous section, the characteristics of the S-band sea clutter Doppler spectra in the South China Sea were investigated. For the signal detection in radar systems, the covariance matrix of the detection range cell based on the clutter data of neighborhood reference range cells must be typically estimated. Thus, the sea clutter is usually assumed to be spatially uniform, that is, the sea clutter in neighborhood range cells shares the same Doppler characteristics. However, due to the different wind conditions in different radar ranges and the modulation effect of the slow varying wave components on the clutter power spectrum, the Doppler spectra for different radar range gates have different characteristics.[20] Therefore, firstly, the range-Doppler maps of the sea clutter in various conditions were analyzed to illustrate the variational manner of the spectrum lineshapes for different radar range gates, which is conducive to the estimation accuracy of the covariance matrix of the detection range cell. Then, the Doppler lineshapes for different sea states, different wave directions, and different radar range resolutions were compared and analyzed.
4.1. Different sea states
The typical range-Doppler maps of the sea clutter in the South China Sea estimated from the SSCMR clutter data in different sea states are presented in Fig.
 | Fig. 6. Range–Doppler maps of sea clutter in the South China Sea in sea states of (a) 2, (b) 3, (c) 4, and (d) 5. |
By comparing the Doppler spectrum intensities shown in Fig.
Figure
 | Fig. 7. Comparison of inherent spectrum lineshapes of sea clutter in the South China Sea in different sea states: (a) gate = 180 and (b) gate = 230. |
4.2. Different wave directions
Figure
 | Fig. 8. Range–Doppler maps of sea clutter in the South China Sea in (a) upwave, (b) downwave, and (c) crosswave directions. |
To illustrate the influence of wave direction on Doppler spectrum lineshape, figure
 | Fig. 9. Comparisons of sea clutter spectrum lineshapes of the South China Sea in different wave directions: (a) gate = 120 and (b) gate = 200. |
4.3. Different radar resolutions
The typical range–Doppler maps of the sea clutter in the South China Sea, estimated from the SSCMR clutter data with four different radar range resolutions, are displayed in Fig.
 | Fig. 10. Range–Doppler maps of sea clutter in the South China Sea for radar range resolutions of panel (a) 7.5 m, panel (b) 15 m, panel (c) 30 m, and panel (d) 60 m. |
Based on the clutter data of range gates 130 and 220 shown in Figs.
 | Fig. 11. Comparisons of sea clutter spectrum lineshape of the South China Sea in different radar range resolutions: panel (a) gate = 130 and panel (b) gate = 220. |
4.4. Doppler spectrum parameters
In addition to the characteristics of Doppler spectrum lineshapes, the quantitative results of the Doppler spectrum parameters, including the Doppler mean shift and bandwidth, play an important role in suppressing the clutters of radar target detection. Based on the estimated inherent Doppler spectrum lineshapes from the large data sets in the experiment, we calculate and analyze the characteristics of the two Doppler spectrum parameters in the South China Sea, and the statistical results are shown in Table
| Table 4. Statistics of Doppler spectrum parameters of radar sea clutter. . |
According to the results given in Table
(i) Under all measuring conditions, the variation trends of the Doppler mean shift and bandwidth as a function of sea state are very evident. The higher the sea state, the larger the absolute values of the two parameters are, which is in accordance with the scenario for faster wave speed and more complex sea wave components in higher sea states.
(ii) The sea wave direction has a distinct influence on the Doppler mean shift and bandwidth. The Doppler mean shift is positive in upwave and negative in downwave conditions, which meets the physical mechanism of the sea clutter Doppler spectrum. The Doppler bandwidth is wider for upwave and narrower in downwave cases, which indicates that there are more components of sea wave velocity in upwave conditions than in downwave conditions.
(iii) The radar range resolution has a little influence on the mean value of the Doppler mean shift and bandwidth. However, as shown in Fig.
5. Conclusions
The Doppler characteristics of the S-band radar sea clutter in the South China Sea are presented and analyzed in this study based on the clutter data measured by SSCMR deployed on “Qiongsha 3” ship in a period of 2017–2018. A novel estimation method used to acquire the sea clutter inherent Doppler spectrum from the shipborne clutter data is introduced, and good agreement between its results and the actual sea clutter spectrum (i.e., the spectrum from motionless ship) is obtained. Further, using this method, the Doppler spectrum lineshapes in the South China Sea are compared and analyzed in sea states, wave directions, and radar resolutions. The dependence of the Doppler lineshape on these measuring conditions is also presented.
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] |