





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Hybrid-triggered consensus for multi-agent systems with time-delays, uncertain switching topologies, and stochastic cyber-attacks
Cite this Article
Chen Xia, Yin Li-Yuan, Liu Yong-Tai, Liu Hao. Hybrid-triggered consensus for multi-agent systems with time-delays, uncertain switching topologies, and stochastic cyber-attacks. Chinese Physics B, 2019, 28(9): 090701 
Permissions
Hybrid-triggered consensus for multi-agent systems with time-delays, uncertain switching topologies, and stochastic cyber-attacks
† Corresponding author. E-mail:
Abstract
We propose a new approach to discuss the consensus problem of multi-agent systems with time-varying delayed control inputs, switching topologies, and stochastic cyber-attacks under hybrid-triggered mechanism. A Bernoulli variable is used to describe the hybrid-triggered scheme, which is introduced to alleviate the burden of the network. The mathematical model of the closed-loop control system is established by taking the influences of time-varying delayed control inputs, switching topologies, and stochastic cyber-attacks into account under the hybrid-triggered scheme. A theorem as the main result is given to make the system consistent based on the theory of Lyapunov stability and linear matrix inequality. Markov jumps with uncertain rates of transitions are applied to describe the switch of topologies. Finally, a simulation example demonstrates the feasibility of the theory in this paper.
Keyword:hybrid-triggered consensus;multi-agent system;time-delay and cyber-attacks;switching topologies
1. Introduction
In the recent decade, multi-agent systems have been extensively studied due to the wide applications in many fields, for example, unmanned aerial vehicle (UAV) cooperative control,[1,2] formation control,[3–5] etc. The consensus problem is a critical issue in multi-agent systems, consistency means that some variables of all agents in a multi-agent system must converge to the same state in the end. There are plenty of results about the consistency of multi-agent systems. In Ref. [6], the concept of partial component consensus in multi-agent system was proposed firstly, and then the consensus problem of partial component in a leader–following multi-agent system with the directed topology was investigated. In Ref. [7], the consensus problem of fractional-order multi-agent systems by sampled-data control based on directed topology with order 
Because the event-triggered mechanism can greatly reduce information transmission among agents and the time of agent controller adjustment, its application is more and more extensive. In Ref. [14], the leader–following consensus problem of discrete multi-agent systems with parameter uncertainties was solved based on the event-triggered control strategies. In Ref. [15], aiming at the consensus problem of leader–follower under fixed and switching communication topologies, a decentralized event-triggered controller was designed. The event-triggered scheme provides a useful method to improve the communication efficiency compared to the time-triggered scheme. Nevertheless, most of the event-triggered mechanisms mentioned above always come at the expense of system performance, and it should usually strike a balance between the amount of communication and system performance. In multi-agent systems, optimizing data transmission methods remains a challenge. In an actual control system, the utilization of the communication bandwidth is sometimes low, and information transmission can be less in a certain period of time. For this system, neither the event triggering scheme nor the time triggering scheme can guarantee the best system performance. How to fully cope with this situation is still a challenge, therefore, we propose a hybrid-triggered mechanism,[16] which includes time-triggered scheme and event-triggered scheme, the purpose is to shorten this gap. There are plenty of results about the hybrid-triggered scheme. For example, the issue of quantized state estimation for neural networks with cyber-attacks was addressed with the hybrid-triggered mechanism in Ref. [17]. In Ref. [18], the hybrid-triggered scheme was proposed to exclude the Zeno behavior. The issue of 
In recent years, the rapid development of the network has made the connection between the control field and the network more tight. The introduction of the network has improved the efficiency in many aspects of the control system, for instance, the processing speed of the control system becomes faster. Nevertheless, it also brings huge challenges, e.g., packet loss, cyber-attacks, network induced delay, etc, among which the cyber-attack is the hottest issue. Therefore, the majority of scholars began to consider cyber-attacks from the perspective of control theory. In Ref. [20], the issue of decentralized event-triggered 
Inspired by the above mentioned works, we concentrate on the design of a hybrid-triggered consensus controller with random network attacks, time-varying delayed control inputs, and uncertain switching topologies. The main contributions of this paper are as follows.
1) The multi-agent system can be described by a linear system, linearizable system, and time invariant system. And a hybrid-triggered scheme is introduced, which includes time-triggered scheme and event-triggered scheme to reduce the burden of network transmission. Switching between the two strategies follows a random Bernoulli distribution.
2) Cyber-attacks are taken into account, the probability of a random network attack occurring also obeys the Bernoulli distribution and the time-varying delay of each agent control input can be non-differentiable and non-uniform.
3) Topologies switching has an uncertain transition probability, which is used to describe network system communication failures or changes in neighbor relationships.
It should be noted that the topology states do not necessarily contain a spanning tree, and the topologies switching can be regarded as a continuous-time Markov chain with an uncertain transition probability. Therefore, the Markov jump linear system can be used to replace the original multi-agent system, and the analysis of the original system consistency is completed by analyzing the stability of the Markov jump linear system. To solve the problem of uncertain conversion rate, we are inspired by Refs. [23]–[26]. As far as we know, there is no research on hybrid-triggered consensus for multi-agent systems with time-varying delayed control inputs, uncertain switching topologies, and stochastic cyber-attacks.
The remainder of this paper is organized as follows. In Section
In this article, the following symbols are used: 









2. Basic theory of graphs
Then
The Laplacian matrix has an important property, i.e., 0 is one eigenvalue of

and

is its corresponding eigenvector.
Graph theory is an important tool for studying multi-agent systems. Each agent can be represented as a node in graph theory. The information interaction among agents is represented as an edge in graph theory. A simple directed graph can be expressed as 















Therefore, the Laplacian matrix 
 |
 |
3. Problem formulation
3.1. Consensus problem
where

represents the state variables of the i-th agent, the order of the agent dynamics is determined by n, and

is the control input of the i-th agent.

changes with time, and represents the connected agents of the multi-agent system at each instant of time t.

is the time-varying delay that affects the control input of the i-th agent. Let
, where τ is a constant,

is disturbances that change with time, which satisfies

, therefore

is satisfied for all agents in the multi-agent systems.
where

is the constant matrix gain,

determines the current topology state, for instance, if there is no communication between nodes i and j, then

, and

represents the control input based on the current topology of agent i. The initial conditions of agents’ states are shown as follows:
in interval

, the function

is arbitrary and corresponds to the set of initial conditions.
In the above formula,

represents the probability of switching from topology p to topology q in interval

at time t, for

,

holds,

are the elements of the uncertainty transfer rate matrix
where

represents an estimated value of the probability of switching from state p to state q, and

represents an error of the estimated value. Here

is unknown and
with

. It is obvious that both

and

are positive, and

,

, therefore,

is obtained. Finally, let the initial distribution of the Markov chain be
.
Here

is a complete stacked state vector and

,

is the current input vector of the k-th agent, moreover,

and

are arranged in the same form, where

is a column vector of nm dimension, its k-th term is one, and the other terms are zero, and

is the Laplacian matrix of the current subgraph, only the edge pointing to the vertex

is considered at this time. Notice that

, where

is the the Laplacian matrix which contains all the edges in the current topology

.
where tr are positive integers, which satisfy

,

is the corresponding delay caused by the network, and h is the sampling period. According to Ref. [29], let

, therefore equation (10 ) can be rewritten as
where

, with

being the maximum value of the delay.
where

,

, and

The expression of the threshold error is

.
where

. Here

has the following properties:
![]()
where

is the expectation of

, and

represents the variance of

.
where

is the expression of the cyber-attacks, and

represents the time-delay of the cyber-attacks. Here

is also a random Bernoulli variable, which indicates the probability of occurrence of the cyber-attacks and

,

.
where

and

. Therefore, the definition of consistency is given as follows.
where

is the constant matrix upper bound of the nonlinear function

.
where

.
Consider a multi-agent system with m agents, each with the following dynamic mathematical model:
 |
The consensus controller in this paper is proposed as follows:
 |
 |
According to Ref. [27], the continuous time Markov chain determines the dynamics of the parameter 

 |
 |
The dynamic mathematical model (
 |
 |
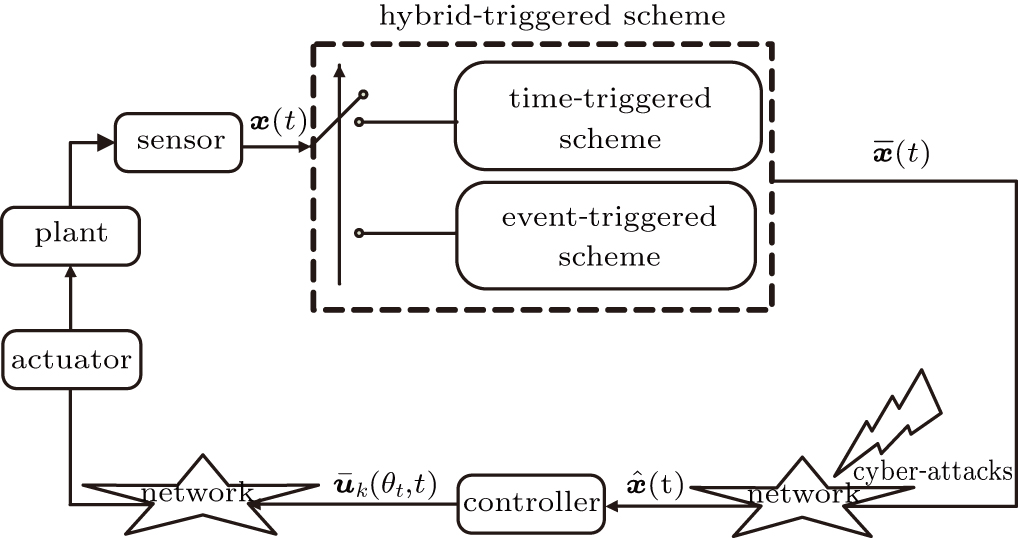
The structure of the hybrid-triggered consensus for the multi-agent systems with time-varying delayed control inputs, uncertain switching topologies, and stochastic cyber-attacks is shown in Fig.
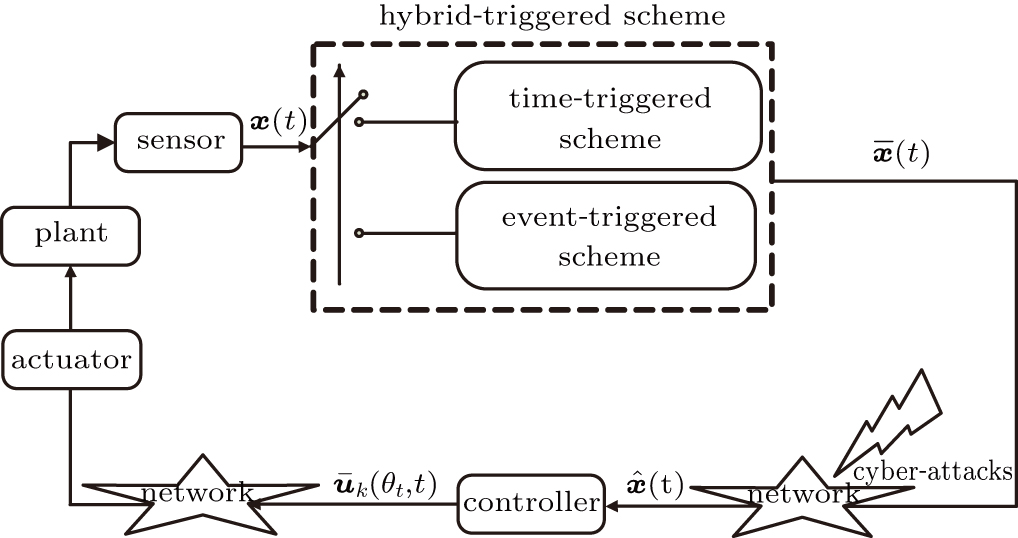 | Fig. 1. Structure of hybrid-triggered consensus for multi-agent systems with time-varying delayed control inputs, uncertain switching topologies, and stochastic cyber-attacks. |
When the time-triggered mechanism is used in the hybrid-triggered mechanism, the sampled data will be transmitted as follows:[28]
 |
 |
According to Fig.
 |
For the convenience of operation, according to Refs. [31] and [32], we can divide interval 





The sampled signal in the event-triggered mechanism can be written as follows:
 |

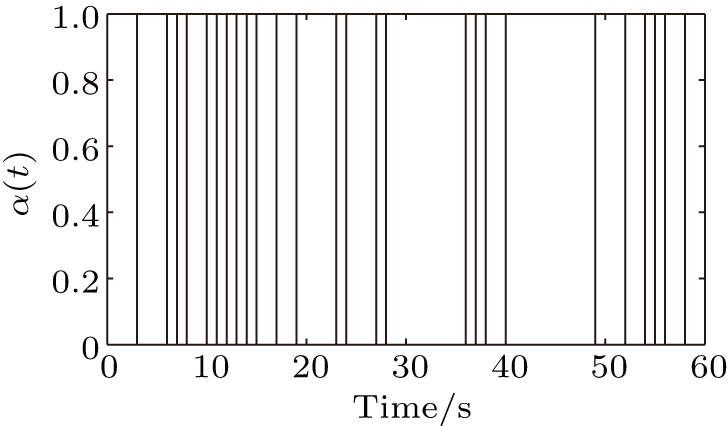
According to Ref. [32], in order to make full use of the limited network resources, the hybrid-triggered mechanism is introduced. The probability of switching between the time-triggered mechanism and the event-triggered mechanism is described by the random Bernoulli variable 

 |




Because of the introduction of networks in multi-agent systems, not only the delay caused by the network, but the stochastic cyber-attacks should be considered, in fact, the stochastic cyber-attacks are deception attacks, which will tamper with and destroy data from multi-agent systems in a network environment, which will result in each agent in the multi-agent system failing to receive correct and complete information, and degrade the performance and even cause system system crashes. In this paper, cyber-attacks are represented by a nonlinear function 

 |
Therefore, by substituting Eq. (
 |




The closed-loop equation for the system can be obtained by substituting Eq. (
 |




An assumption and some lemmas are introduced in the following.

 |


 |


 |



 |


 |
3.2. Transformed multi-agent system
for

. The above equations are written in compact forms as follows:
where

,

,

,

, and

.
substituting Eq. (17 ) into Eq. (32 ), then combining with Eqs. (29 )–(31 ), and applying the fact that

,

, and

to eliminate the terms that have

,

,

,

, and

, then the following disagreement system (33 ) could be obtained:
where
,

, and

.
According to Refs. [40] and [41], the method of tree-type transformation is used to translate the consensus problem into a stability problem. This is finished by introducing new variables that represent the disagreement of variables
 |
 |
 |
 |
 |
 |
 |
 |
 |
We calculate the derivative of time of Eq. (
 |
 |
Therefore, the consistency of system (

Notice that for the convenience of derivation and calculation, 

4. Consensus analysis
where
![]()
with
![]()
![]()
where

corresponds to the state vector

value and

,
with

. Each matrix variable in each term of (36 ) is assumed to be positive definite, therefore,

is positive definite.
where

, and

and

are both matrices that have appropriate dimensions. And we know the fact that
with
Next, we apply Lemma 4, and have
Substituting Eq. (47 ) into Eq. (45 ), we can obtain
Furthermore, according to Eq. (36 ), we have
In the above formula,

is discussed firstly. Based on Eq. (37 ) and appling Lemma 3, we have
we know
and let

, therefore the following inequality can be obtained:
We can also obtain
Applying Lemma 2 to Eq. (53 ), we have
with

.
where

,

. For

in the above formula, we have
and

,

,

are established. Then substitute Eq. (33 ) to Eq. (55 ) and apply Assumption 1 and the event-triggered condition, combine with Eq. (56 ) at the same time, finally, both ends of the inequality take mathematical expectations simultaneously, we can obtain
where

and
. We also have
according to Lemma 1, we can obtain
where
and

is defined in Theorem 1. We must know that
and
Therefore, equation (61 ) can be rewritten as
where
, causing the inequality (35 ), therefore,

and assume that
and the generalized Itô’s formula is applied, we obtain
where

is the random initial topology when the time is zero. So
which illustrates

, therefore, system (33 ) is stochastic asymptotically stable in the mean square sense, i.e., the loop-closed system (17 ) finishes consensus in the light of Definition 2. This completes the proof.
The following theorem gives the sufficient conditions that can guarantee the consistency of the multi-agent system with time-varying delayed control inputs, switching topologies, and stochastic cyber-attacks under the hybrid-triggered mechanism.



























 |
 |

 |
 |
 |
 |
 |
 |
 |
According to Eq. (
 |
 |
Combine Eq. (
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
For 
 |
 |
 |
 |
 |
 |
Therefore, the following inequality can be obtained:
 |
 |
 |
 |
In order to guarantee 

 |
 |
 |
 |
 |
5. Numerical simulation
where

is the position, b is the damping constant, and c is the spring constant. And the controller is designed as follows:
where k is the constant gain, and

are used to calculate the desired constant distance

. Substituting Eq. (71 ) into Eq. (70 ), we have
In this section, a numerical example is given to illustrate the feasibility of the algorithm designed in this paper. According to Refs. [44] and [45], the following system is considered:
 |
 |
 |
 |
Therefore, formulas (




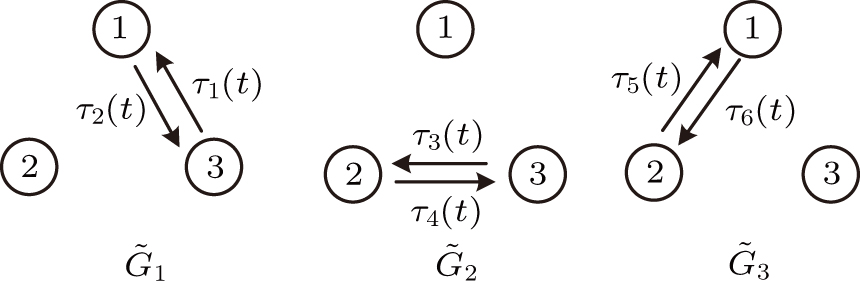
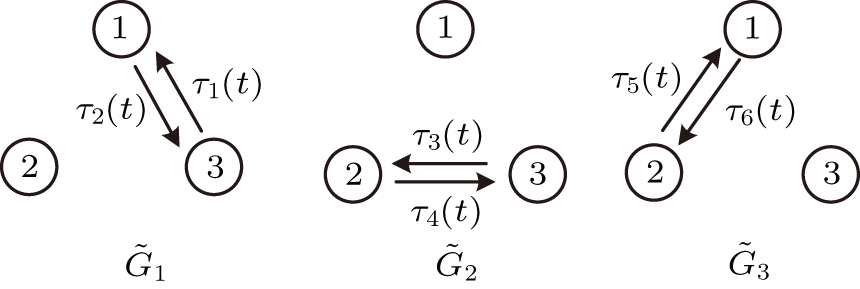 | Fig. 2. Multi-agent systems with three topologies 


|
So the Laplacians are
 |
In order to match the 
 |
Notice that if there is no edge that points to vk in a topology, then its Laplacian 





Set 

 |
We have the sampling period h=0.002 s, the initial state 









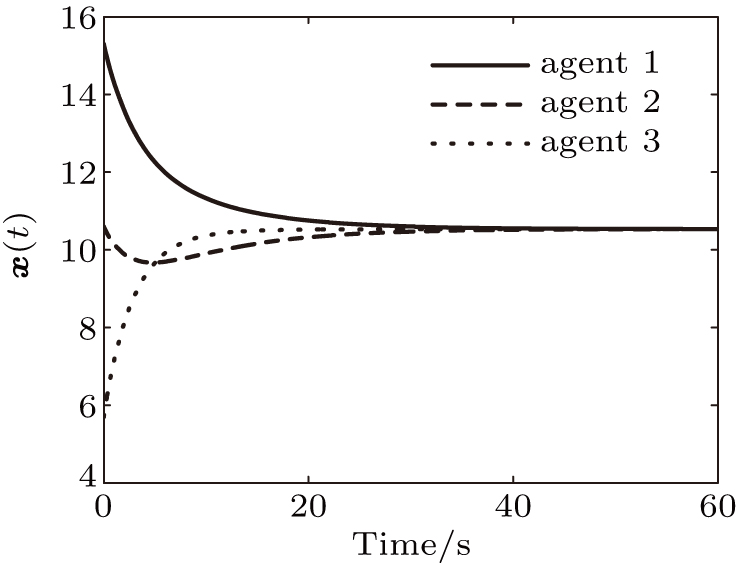
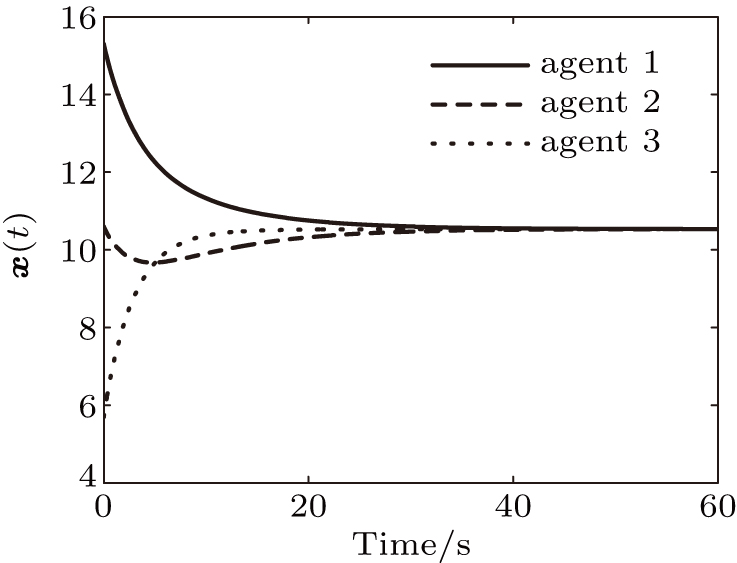 | Fig. 3. The response curve of three agents’ states. |
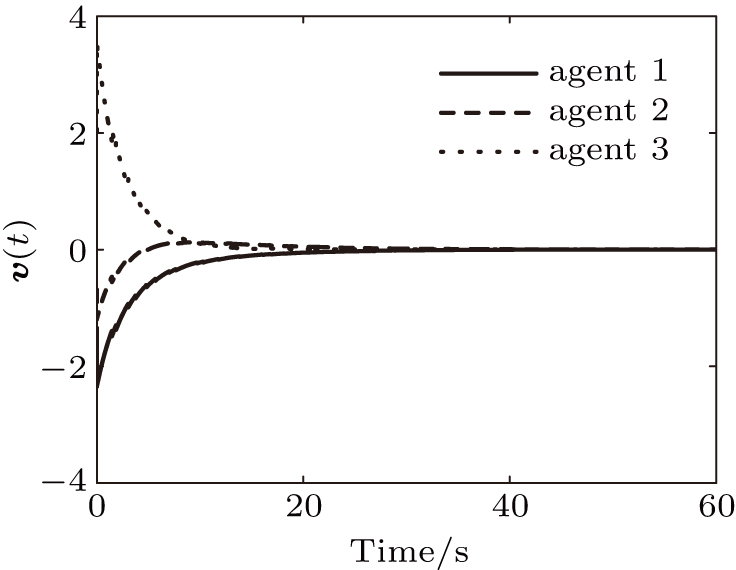
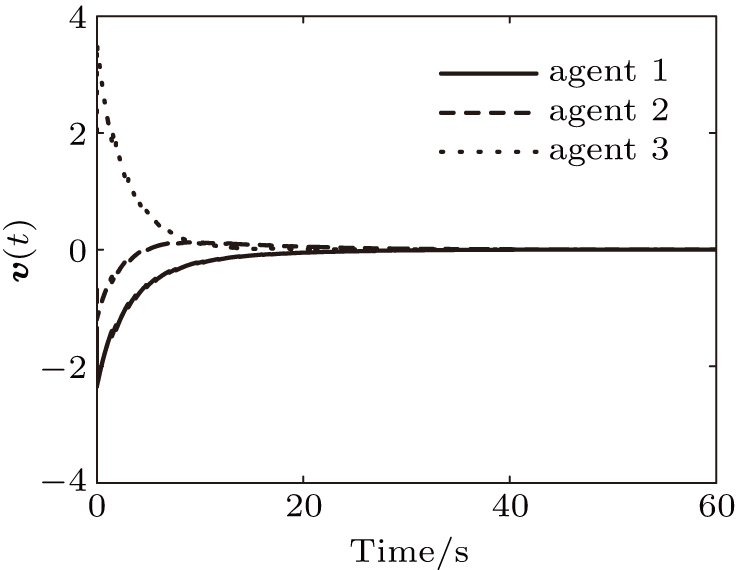 | Fig. 4. The response curve of three agents’ velocities. |
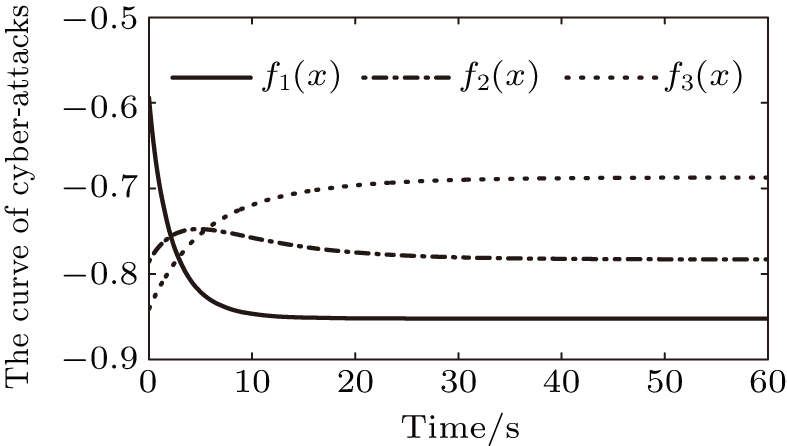
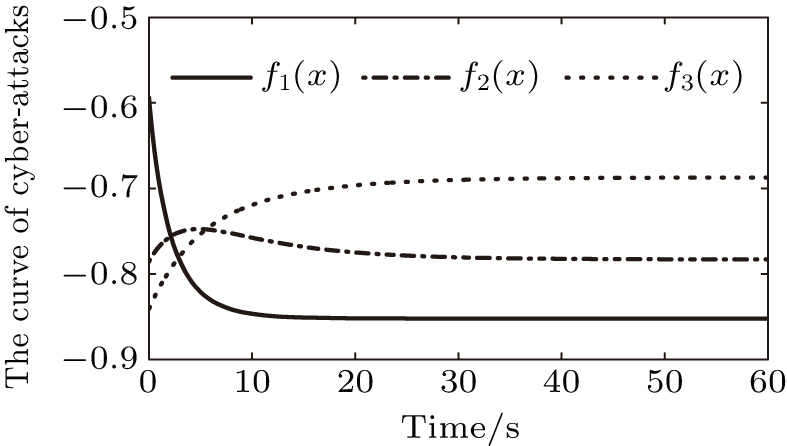 | Fig. 5. The graph of cyber-attacks. |
 | Fig. 6. The triggered moments and released intervals of the event-triggered scheme. |
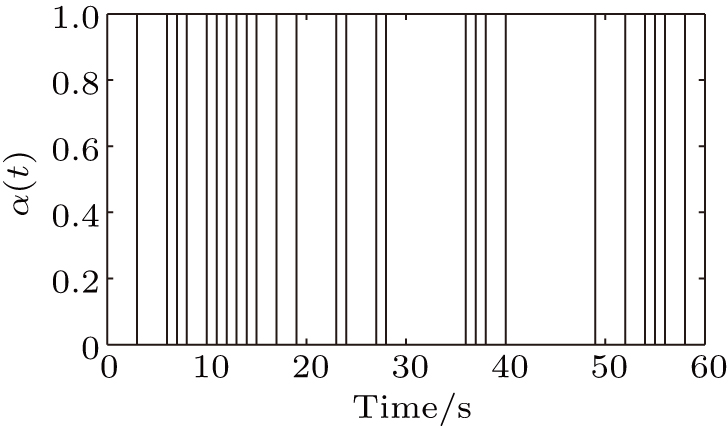
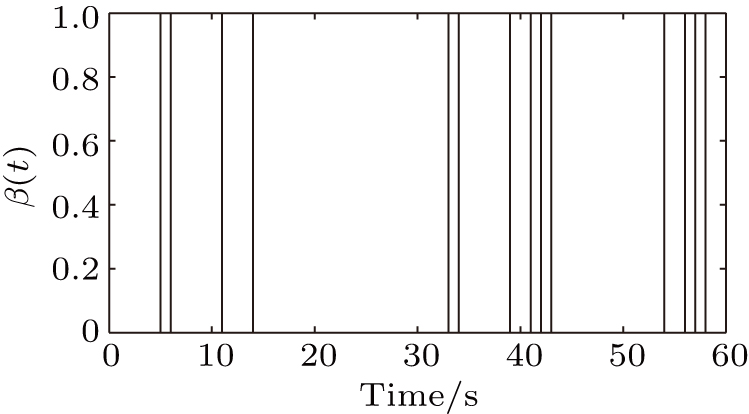
 | Fig. 7. The 
|
Figure 


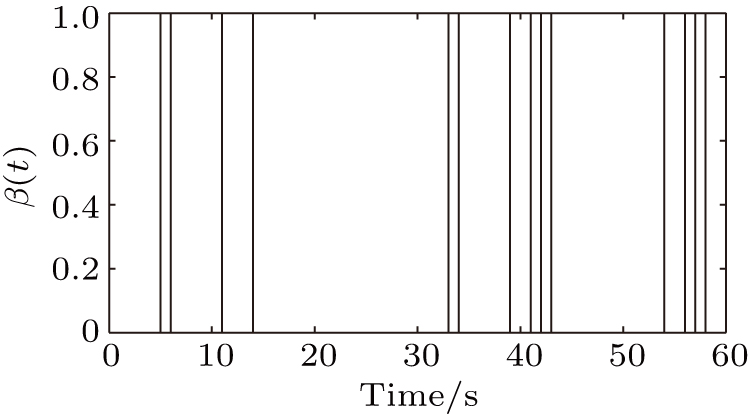
 | Fig. 8. The 


|
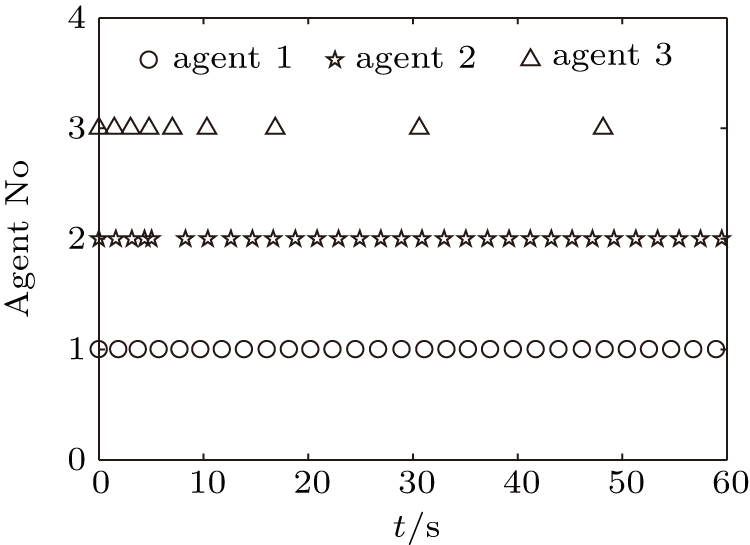
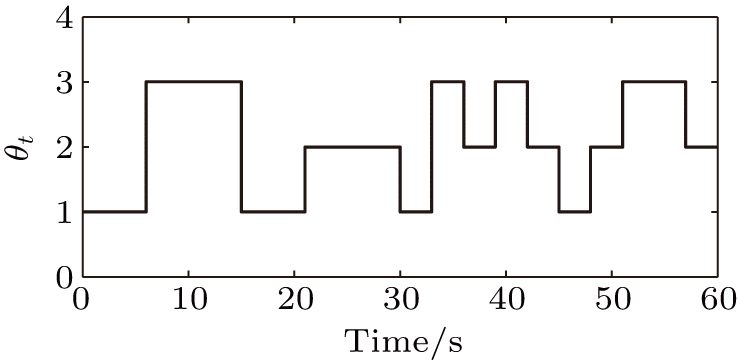
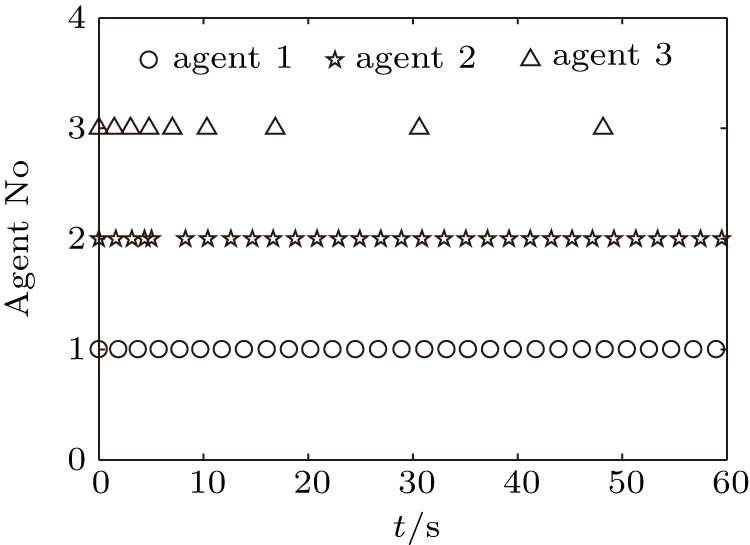
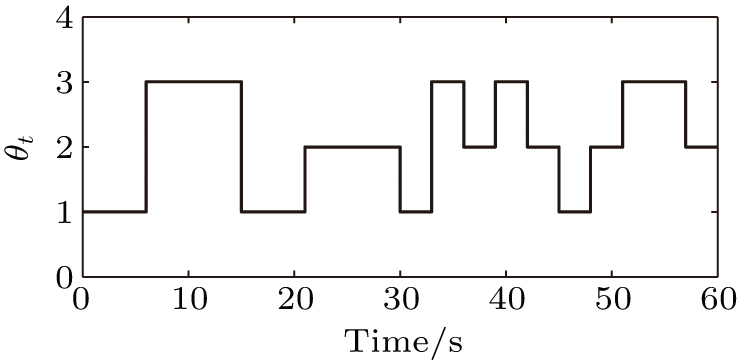 | Fig. 9. The switching between three topologies 


|
Since the hybrid-triggered mechanism is introduced in this paper, therefore its usefulness should be demonstrated. Comparisons between different triggered mechanisms are displayed in Tables
| Table 1.
Number of data transfers in different mechanisms. . |
According to Table
| Table 2.
Number of data transfers in different mechanisms. . |
Through the above analysis, we can see that the hybrid-triggered scheme proposed in this paper can adaptively gather the massive data in the initial stage to promote the control system to reach stability. After the system reaches the steady state, the hybrid-triggered mechanism can effectively reduce the number of transmitted data and save lots of network resources.
The simulation example shows that the proposed algorithm in this paper can be applied to the consistency verification of general linear dynamic systems with time-delay. Moreover, it can be proved that even if there are no spanning trees in all three topologies, the system can still converge. Finally, the probability of switching between the three topologies is uncertain and the method in this paper can analyze the consistency of the system under uncertainty and estimation. Therefore, the method can more flexibly ensure system consistency . Based on the above analysis, it can be seen that the multi-agent system finally achieves asymptotic stability and consistency, i.e., the hybrid-triggered consensus controller designed for multi-agent systems with network attacks, time-varying delays control inputs, and uncertain switching topologies is effective.
6. Conclusion
In this paper, the consistency problem of multi-agent systems with time-varying delay control inputs, switching topologies, and stochastic cyber-attacks under a hybrid-triggered mechanism is investigated. First of all, the hybrid-triggered scheme is introduced to alleviate the network burden. In order to be closer to the actual situation, the time-varying delay, switching topologies, and cyber-attacks are also considered, where the cyber-attacks are described by a Bernoulli variable. Secondly, the consistency condition that can guarantees the system consensus in the mean-square sense is given by a theorem even if there is no spanning tree in the communication topologies, and the theorem is obtained by using the theory of Lyapunov stability and linear matrix inequality. Finally, a simulation example is given to demonstrate the effectiveness of the method proposed in this paper.
Reference
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 | |
| 21 | |
| 22 | |
| 23 | |
| 24 | |
| 25 | |
| 26 | |
| 27 | |
| 28 | |
| 29 | |
| 30 | |
| 31 | |
| 32 | |
| 33 | |
| 34 | |
| 35 | |
| 36 | |
| 37 | |
| 38 | |
| 39 | |
| 40 | |
| 41 | |
| 42 | |
| 43 | |
| 44 | |
| 45 | |
| 46 | |
| 47 |