






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Influence of warm eddies on sound propagation in the Gulf of Mexico
Cite this Article
Xiao Yao, Li Zhenglin, Li Jun, Liu Jiaqi, G Sabra Karim. Influence of warm eddies on sound propagation in the Gulf of Mexico. Chinese Physics B, 2019, 28(5): 054301 
Permissions
Influence of warm eddies on sound propagation in the Gulf of Mexico
† Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant Nos. 11434012 and 41561144006).
Abstract
Abstract
An automatic detection method is employed to identify and track eddies in the Gulf of Mexico. The physical parameters of the eddies, such as lifespan, radius, and distribution position are first examined and used to determine the spatio–temporal evolution of a strong warm eddy separated from the Mexico current. Then, the influence of this strong warm eddy on sound propagation during its lifespan are comprehensively analyzed with the parabolic equation and explained by using the normal mode and ray theories. Additionally, the influence of mesoscale eddies on the redistribution of total depth-integrated energy among the normal modes in the deep water is also discussed. The variation of arrival angle is investigated to explain the spreading acoustic energy caused by eddies. Overall, the results show that warm eddies can change the propagation paths and cause the convergence zone to broaden and approach the sound source. Moreover, the warm eddy can disperse sound energy and cause the total depth-integrated energy to incline to a lower normal mode. Throughout the whole of these three periods (eddy generating, eddy maturing, and eddy terminating), the fluctuation in the transmission loss is up to 30 dB (depending on the relative location of eddy center to the source).
1. Introduction
Mesoscale eddies, similar to cyclones or storms in the atmosphere,[1–4] are relatively large coherent rotating bodies of water in the ocean. They are often accompanied by large ocean currents. For instance, at the edge of the Kuroshio, there are usually mesoscale eddies with radii of tens to hundreds of kilometers. According to previous studies,[1–7] eddies move slowly and can thus be considered as the quasi-static feature in the water column when compared to the much faster time-scale of sound propagation. Since the cold or warm water carried by mesoscale eddies can significantly change the ocean temperature and salinity distribution, mesoscale eddies can significantly change the sound speed profile structure, thus affecting underwater sound propagation. Consequently, it is meaningful for oceanographers and acousticians to understand the influence of mesoscale eddies on acoustic propagation, which has a broad application in the inversion of sound field environment, the underwater communication, the detection of ocean information, and so on.
Several studies have investigated the physical characteristics of mesoscale eddies and their influence on long-range sound transmission.[5–13] Henrick presented an analysis of the influence of mesoscale eddies on sound propagation and the received time-series which were solved by the ray-mode theory algorithm.[6,7] Hall used adiabatic normal mode model to compute the horizontal refraction of the acoustic signal caused by mesoscale eddies.[8] The effects of cold-core eddies on the propagation of Sound Fixing and Ranging (SOFAR) channels were studied by Vastano and Owens[9] using numerical simulation based on geometric acoustics theory for a source that was located at the center of an eddy. Weinberg and Zabalgogeazcoa then discussed sound sources located outside the eddy.[10] Bare[11] studied the horizontal and vertical refraction of the sound propagation characteristics in the eddy area using three-dimensional parabolic equation model. Because of the seasonal distribution of mesoscale eddies, Lawrence studied the effects of eddy on sound propagation in winter and summer.[12] Chen[14] revealed the influence mechanism of eddies on acoustic propagation from the perspective of surface waveguide by using the Array for Real-Time Geostrophic Oceanography (ARGO) buoy data and typical two-dimensional (2D) ray algorithm. Heaney[15] used a fully three-dimensional parabolic equation model to examine the horizontal refraction due to mesoscale eddy at low frequency acoustics in the South Indian Ocean.
Generally, the influence of eddies on sound propagation is investigated using modelled eddy geometry.[5–13] However, the method using traditional acoustic propagation analysis method combined with the ideal eddy to examine the influence of the mesoscale eddy on the sound propagation cannot meet the actual applications. Furthermore, the physical characteristics of the real eddies and the influence of acoustic energy fluctuation during their whole lifespan are not systematically examined and analyzed. Therefore, it becomes increasingly important to use a data assimilation procedure that assimilates the actual physical properties of the eddies, in combination with typical and newest research method to analyze and explain the sound filed fluctuation throughout the different periods of actual eddies in the real ocean environment. In this paper, an automatic detection method for eddy[16] combined with the satellite data and oceanography assimilation data is used to identify and track regional eddies in the Gulf of Mexico throughout their lifespan; i.e., including the evolution of their radius and spatial distribution. In particular, the influences on sound propagation of a strong warm eddy, identified with this automated procedure, are comprehensively examined during the whole lifespan of the eddy and systematically analyzed. Additionally, the normal mode and ray theories, the total depth-integrated energy and single mode as initial field method, and the receiving arrival angle are all used to explain and understand the effect of warm eddies on acoustic propagation, such as energy deflection and mode coupling.
The rest of this article is organized as follows. Section
2. Eddy statistics in the Gulf of Mexico
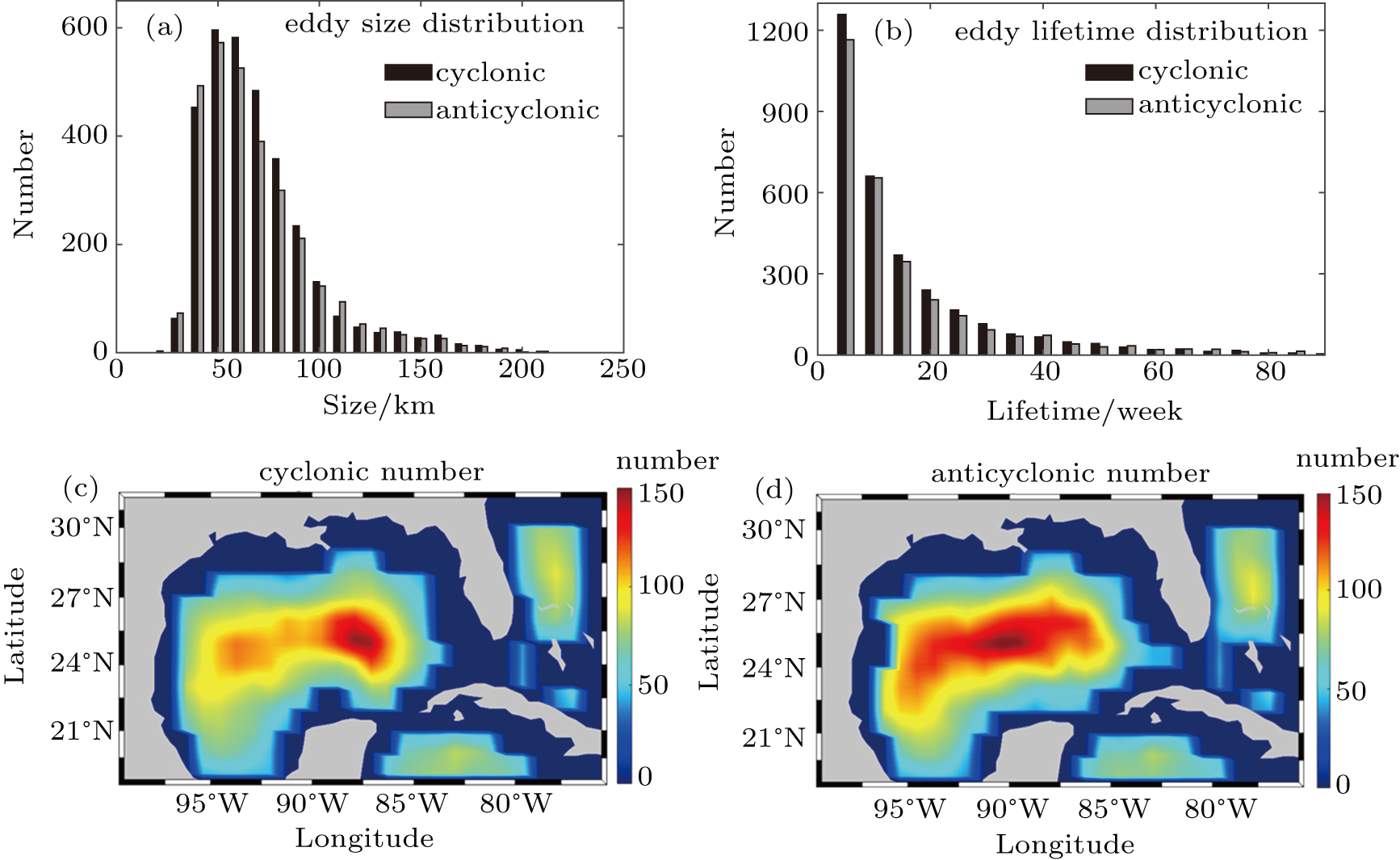
To study the effects of eddy on sound propagation, the characteristic parameters of the eddies in the Mexico Gulf are analyzed using the satellite remote sensing data from Copernicus Marine Environment Monitoring Service (CMEMS).[17] Specifically, we use the SEALEVEL_GLO_PHY L4_NRT_OBSERVATIONS_008_046 dataset. An eddy automatic detection method[16] is used to identify and track the eddies in the Gulf Stream region. The lifespan, radius, and distribution position of the eddies are examined from 1993 to 2014. The principle of this detection method is: (i) the sea level anomaly (SLA) is an enclosed curve; (ii) the depth needs to exceed 800 m at the center of the eddy; (iii) the height difference between the eddy center and the outermost layer of the closed contour is no less than 5 cm; (iv) the eddies can be traced for at least 20 days under the conditions of the first three criteria. The tracks of these eddies are identified every seven days, but only the eddies with a radius greater than 20 km are retrained for statistical analysis. Moreover, the spatial distribution of eddies is present by the number of eddies’ center at each pixel from 1993 to 2014.
The results show that the detected number of cyclone eddies (cold) and anti-cyclone (warm) eddies are 3191 and 3004, respectively. The histogram of radius distribution (Fig.
 | Fig. 1. Statistics of the Gulf Stream eddies of 20 years from 1993 to 2014. (a) Histograms of the eddy size. Black color indicates cyclonic eddies, while the gray color indicates anticyclonic eddies. (b) Histograms of the eddy lifetimes. (c) The spatial distribution of the site associated with the vertical color scale indicates the number of eddies’ center at each pixel. (d) Same as (c), but for anticyclonic eddies. |
3. Quantifying the influences of a strong eddy on sound propagation
To better capture the marine environment for calculating the effect of mesoscale eddy on sound propagation, the profiles of the temperature T and salinity S obtained from the Global Ocean Reanalysis[18] are used to compute the effective sound speed profile. This product is a reanalysis of the ocean state obtained by constraining the nucleus for European modelling of the ocean model at 1/4° resolution with in situ T and S profiles including ARGO and Marine Mammals Exploring the Oceans Pole to Pole (MEOP) profiles, the satellite sea surface temperature, and along-track sea level anomalies. In this section, a strong eddy is picked up in the region of [85°W–92°W, 24.5°N–28°N] on September 26, 2014, as shown in Figs.
 | Fig. 2. The ocean environment parameter of the Gulf of Mexico with the presence of a strong eddy. (a) Surface velocity field and sea level anomaly (SLA) on September 26, 2014. The solid lines indicate the eddy boundaries. The color scale indicates the SLA in m. (b) SLA of the region is shown and magnified. The green cross indicates the horizontal location of eddy center. (c) Sound speed displacement contour along the red line in fig. |
The ocean environment in Fig.








| Table 1.
Geoacoustic parameters for acoustic propagation modeling. . |
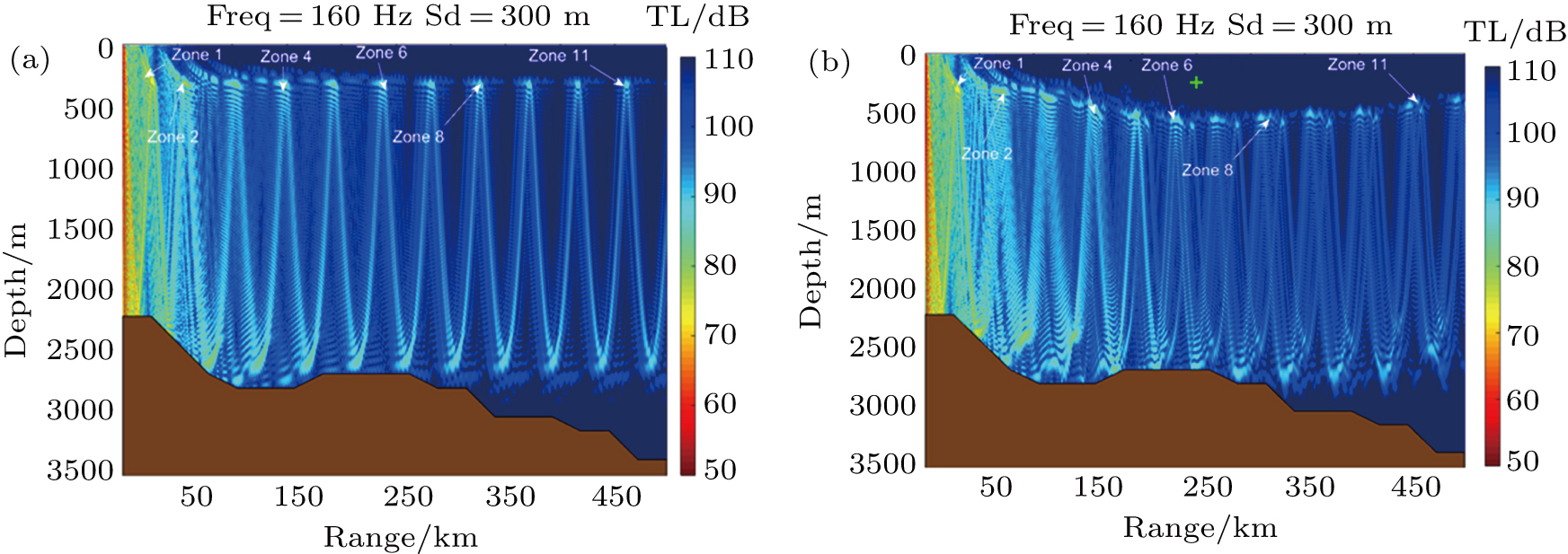
Figure
 | Fig. 3. The comparison of the transmission losses for the environments with/without eddy, with the source depth (Sd) at 300 m and the frequency (Freq) at 160 Hz. The labels “zone n” represents the number of convergence zone for (a) without eddy and (b) with the presence of a warm eddy. The green cross indicates the location of eddy center. |
Figure
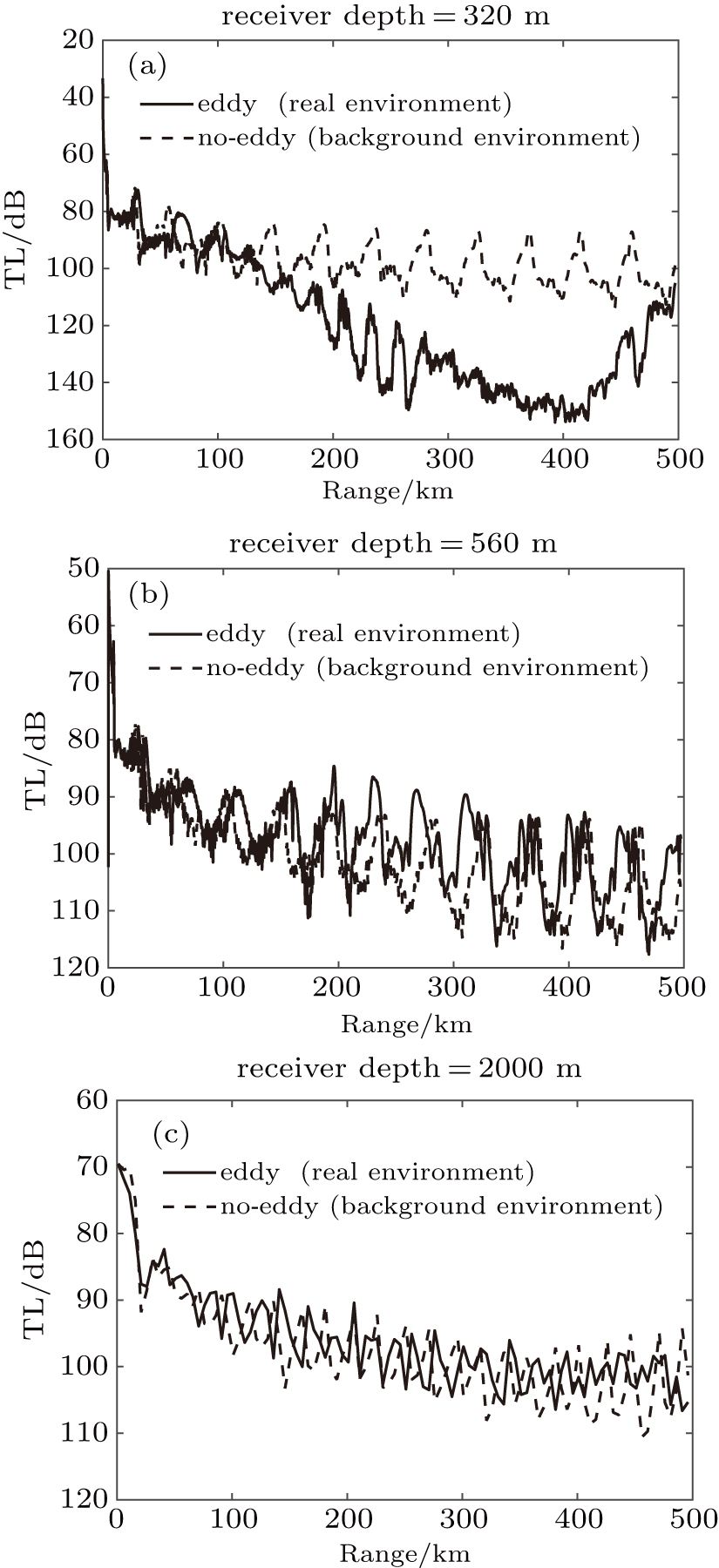 | Fig. 4. Transmission losses at three receiver depths: (a) 320 m, (b) 560 m, and (c) 2000 m. |
3.1. Normal mode interpretation
To further understand the physical mechanisms causing the acoustic energy fluctuation shown in Fig.


Figure
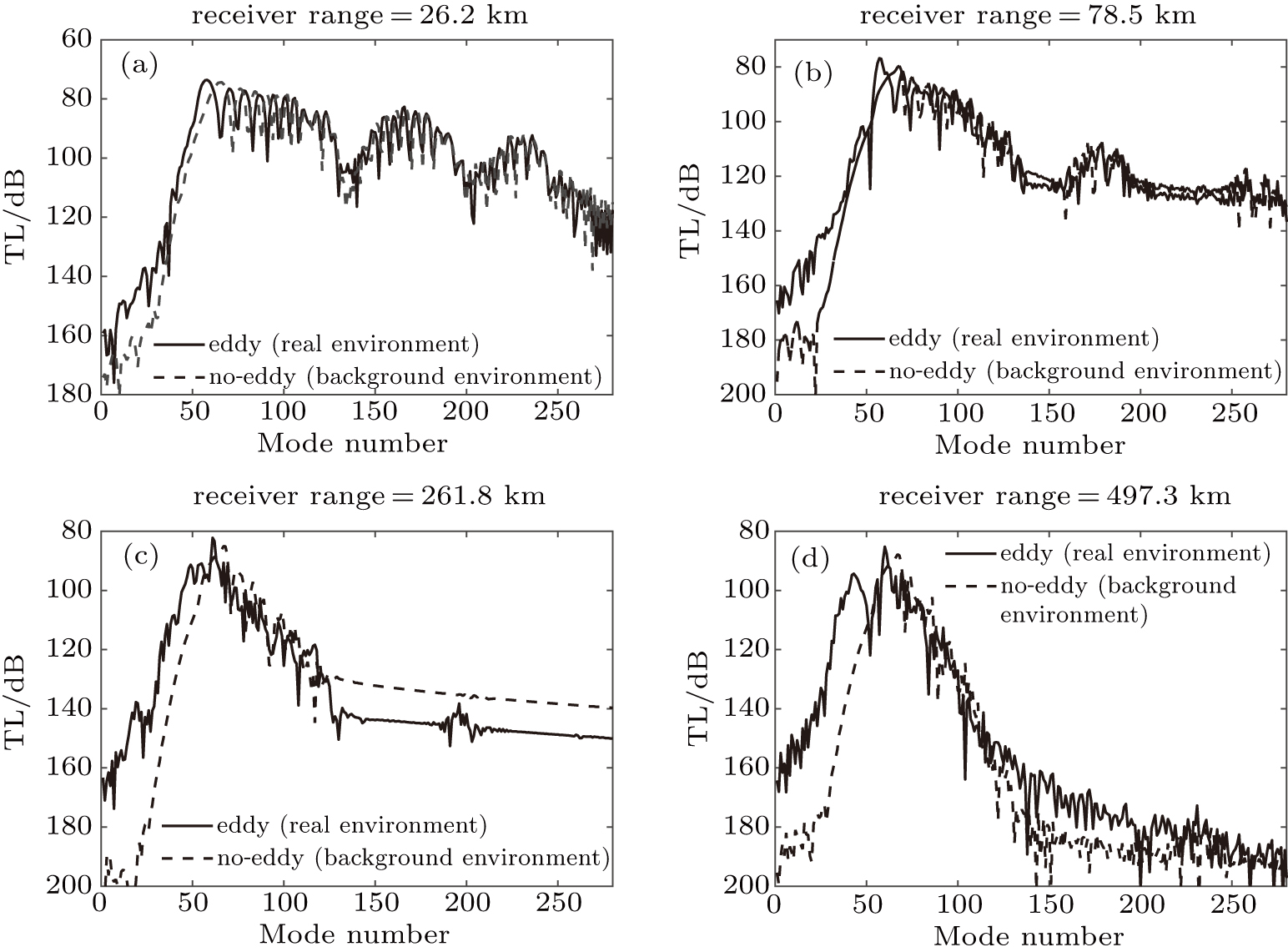 | Fig. 5. Comparison of the transmission loss for different modes in the environments with/without eddy at four different ranges: (a) 26.2 km, (b) 78.530 km, (c) 261.8 km, and (d) 497.3 km. |
Furthermore, due to the influence of the warm eddy, the energy contained in higher normal modes gets redistributed into the lower modes. In the range of 26.2 km, the influence of the eddy on the sound speed is relatively small, hence a relatively small acoustic field fluctuation in energy of modes. As the range value approaches the center of eddies, the influence on acoustic propagation becomes more obvious. That, in turn, leads to the redistribution of the energy. Meanwhile, as bathymetry increases, the energy occupied by the waterborne mode increases. For instance, at the range of 497.3 km, the waterborne mode takes up a certain amount of energy and the structure of energy reaches a steady state. As a result, the energy integrated along with the depth is dominated by the bottom bounce modes and waterborne modes at longer ranges such as 261.8 km and 497.3 km. However, although the energy is biased toward the smaller modes, the bottom bounce modes still dominate.
To explain the energy deflection caused by the eddy shown in Fig.
To show the influence of warm eddy on the energy path of sound propagation, the field from normal modes 42 and 57 serves as the initial field. The TLs for two different environments with/without eddy are given in Fig.
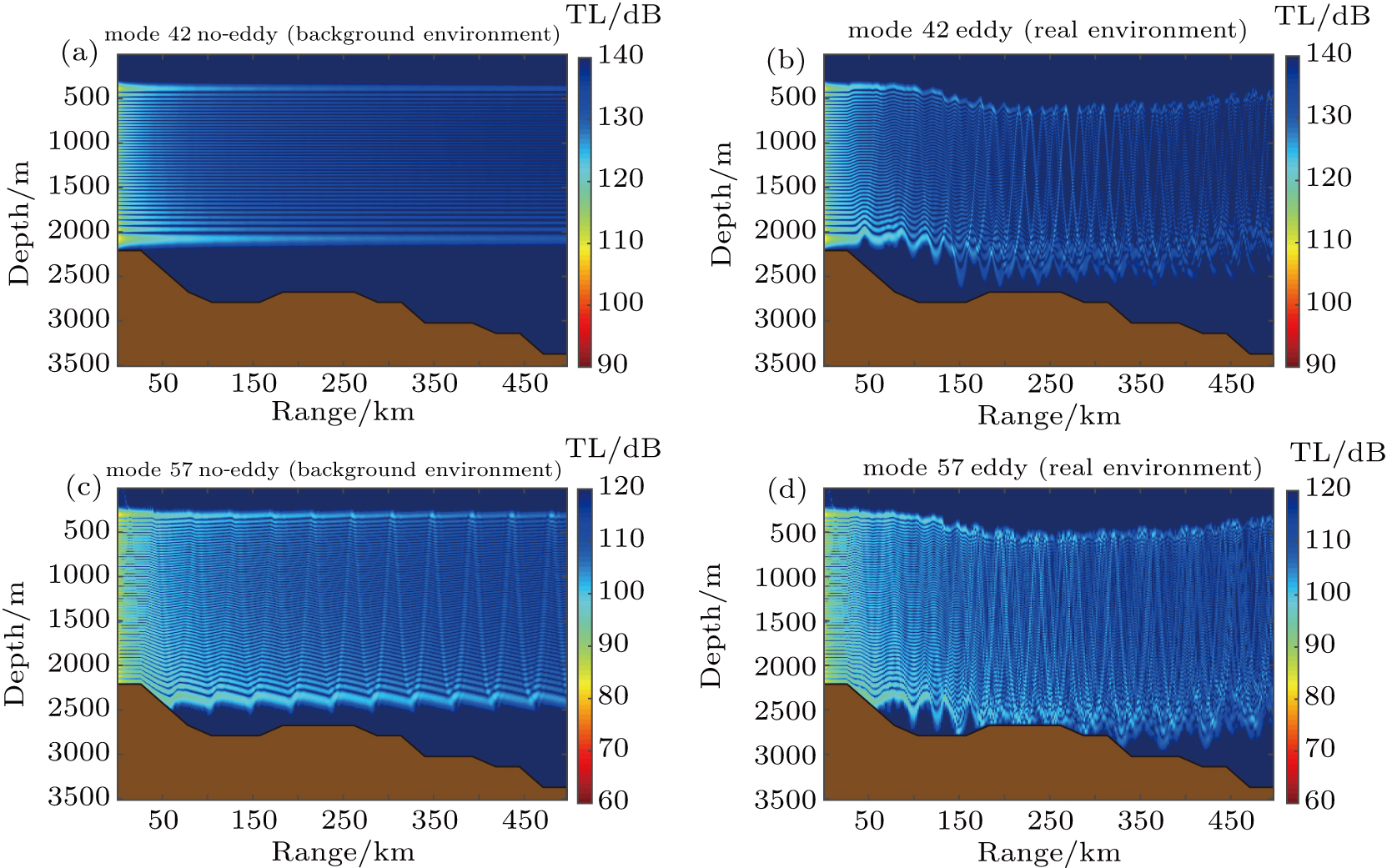 | Fig. 6. Comparison of TLs for environments with/without eddy with the initial field of single mode. (a) Waterborne mode 42 in an environment without eddy, (b) mode 42 in an environment with eddy, (c) bottom-bounce mode 57 in an environment without eddy, and (d) mode 57 in an environment with eddy. |
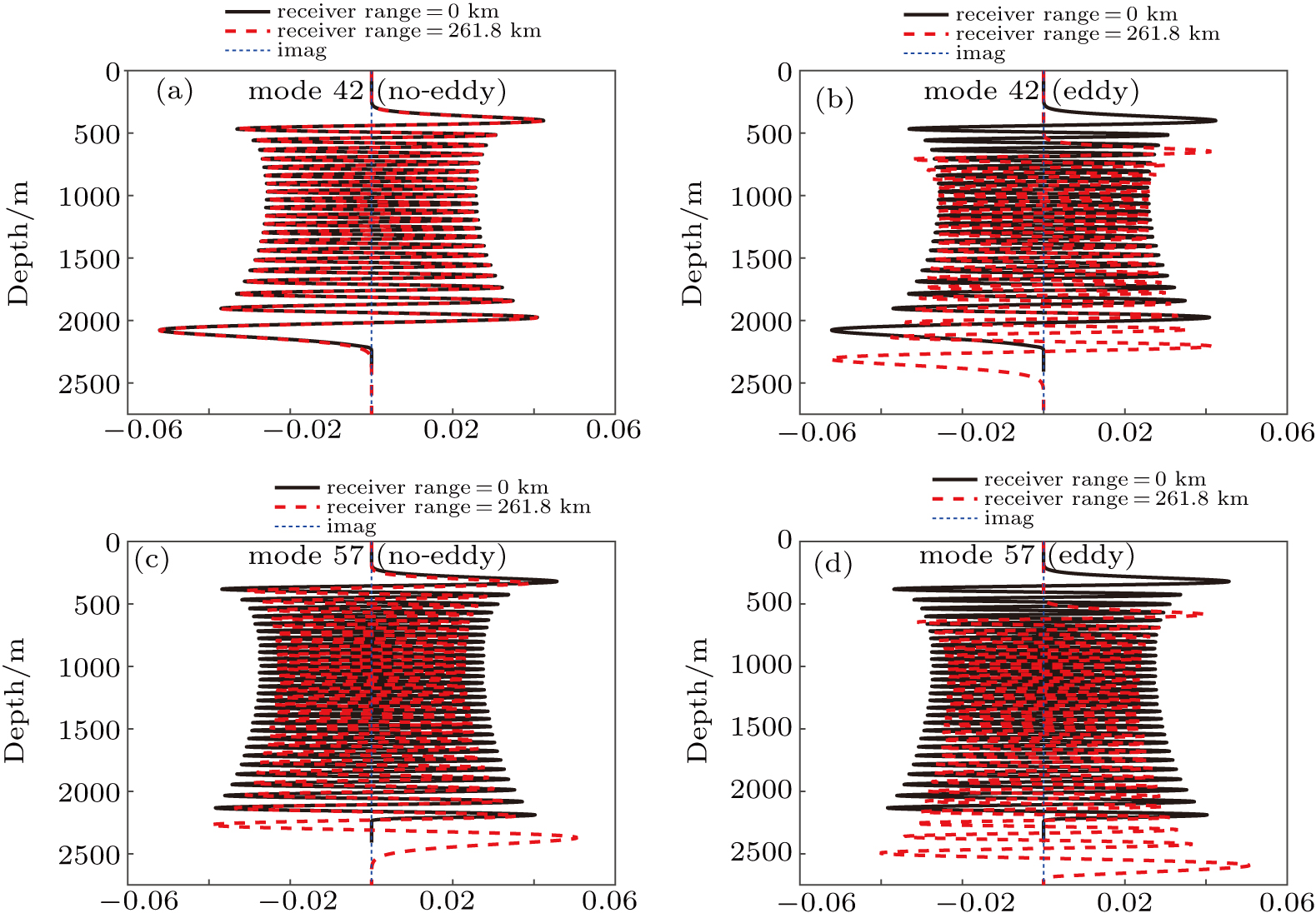
Figure
 | Fig. 7. Comparison of the normal mode eigen-functions for environments with/without eddy. (a) Mode 42 in an environment without eddy, (b) mode 42 in an environment with eddy, (c) mode 57 in an environment without eddy, and (d) mode 57 in an environment with eddy. |
In contrast, Figure
3.2. Ray theory interpretation
As stated in Ref. [23], the normal mode has a corresponding relation with the ray path, so the ray calculated by Bellhop[25] can also be used to illustrate the change in the acoustic propagation path. Since the energy occupied by waterborne modes and leaky modes at a long distance is small, Figure
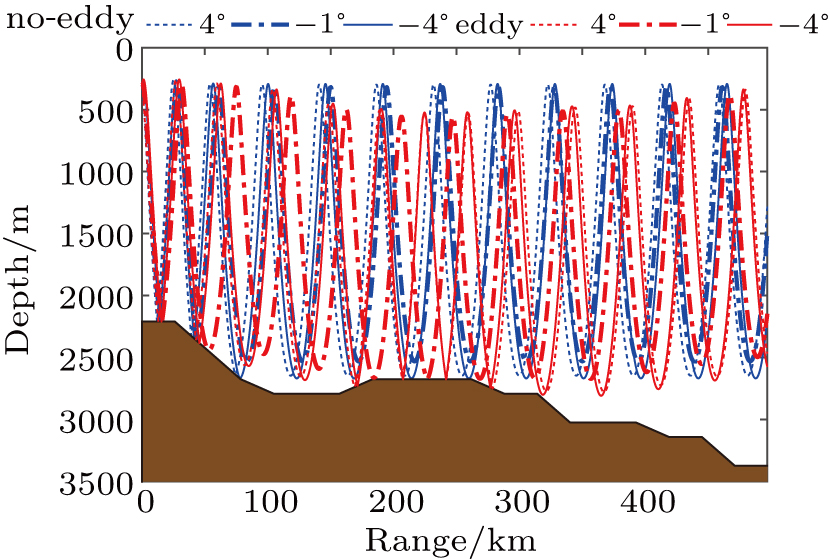 | Fig. 8. Comparison of the ray paths for the environments with (red line)/without eddy (blue line). |
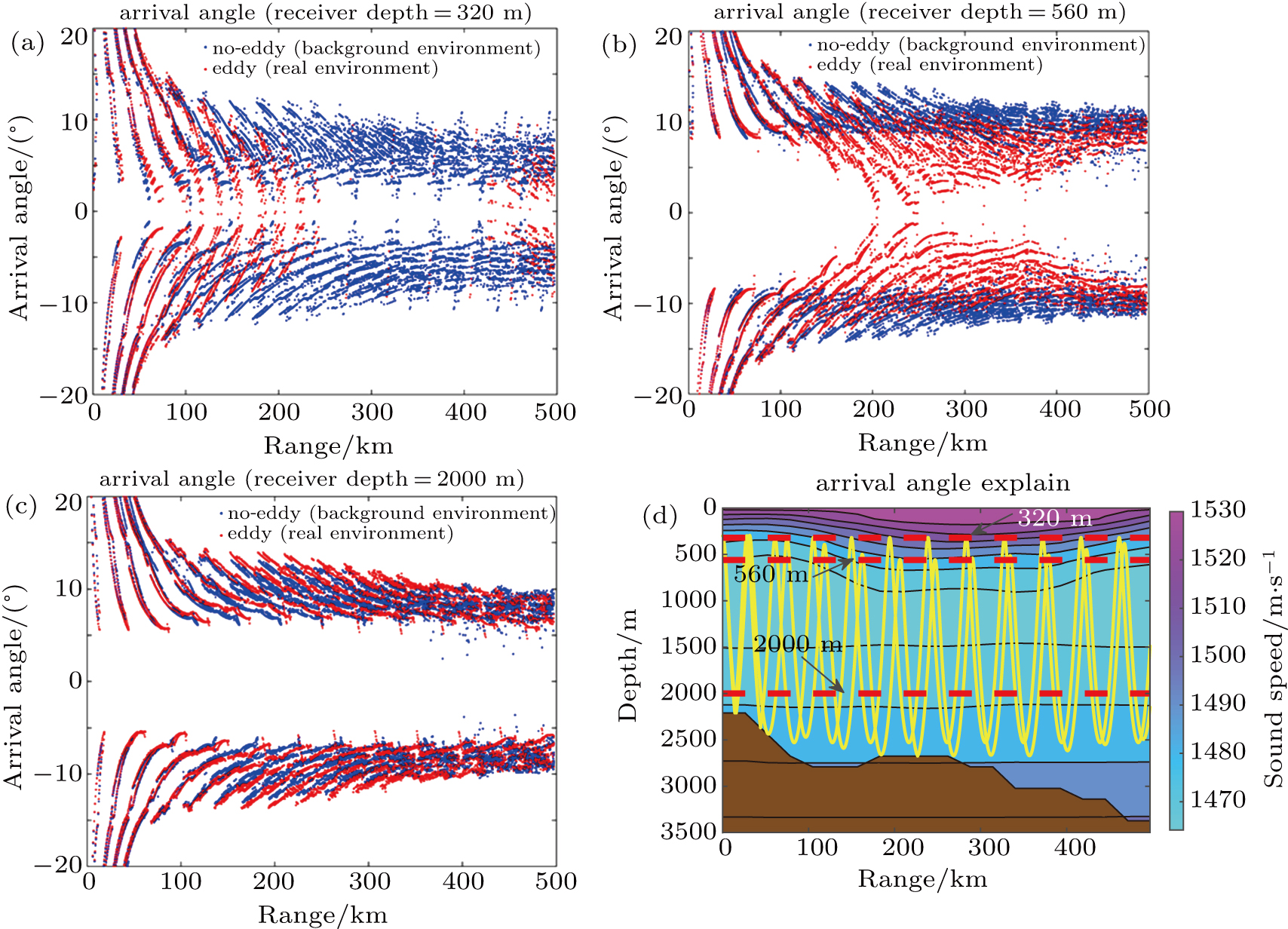
The warm eddy has a diverging effect on energy, as shown in Fig.
 | Fig. 9. The arrival angles at three different depths for the environments with and without eddy: (a) 320 m, (b) 560 m, (c) 2000 m, and (d) ray paths. |
4. Sound field fluctuations caused by the eddy's dynamic
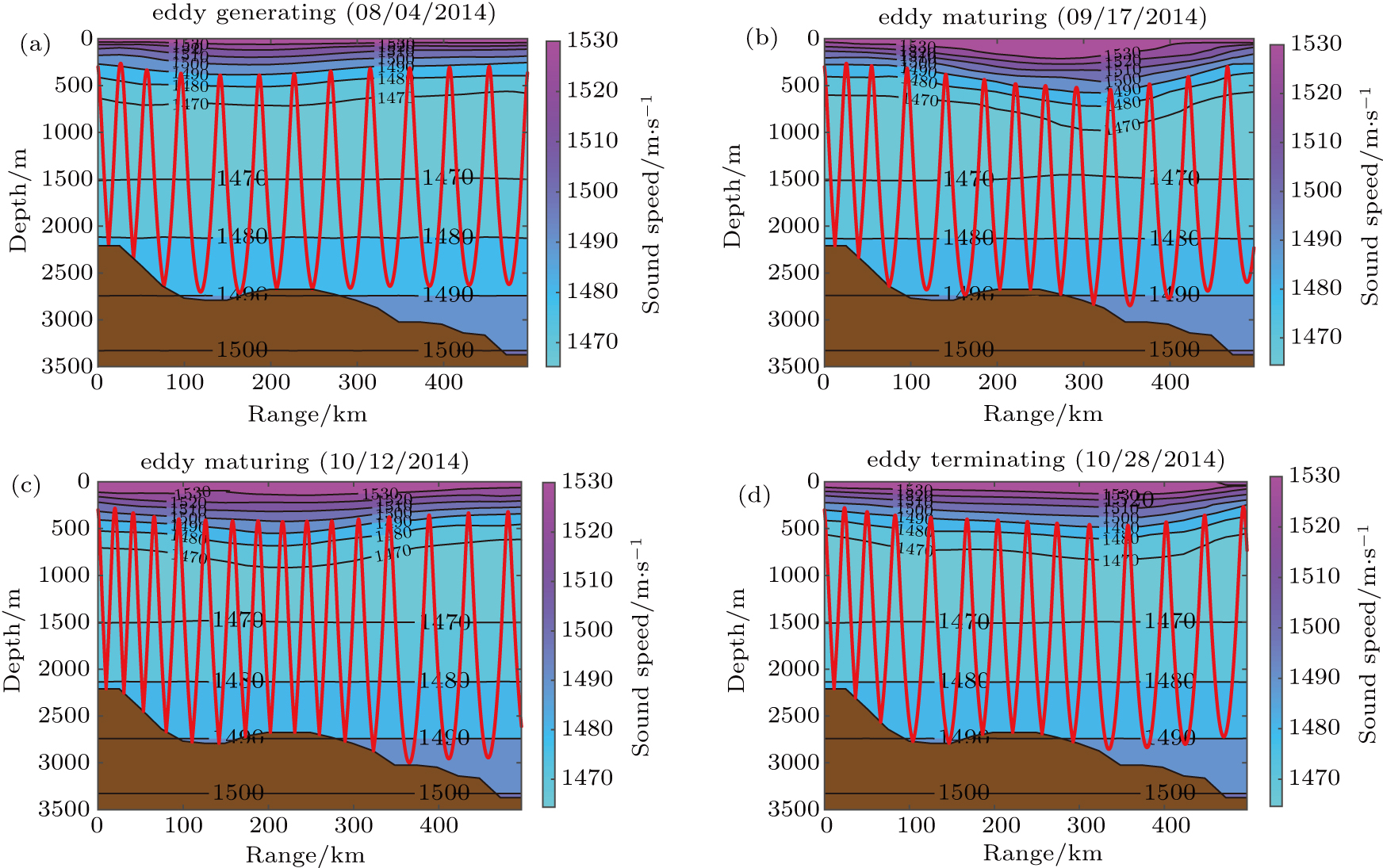
Previous research has been limited to the study of static eddies. However, the acoustic environment in the Gulf of Mexico is complex and dynamic, thus affecting the acoustic field dynamically. In terms of the temporal evolution of its shapes and the change rate of the temperature, the warm eddy in this section is roughly divided into time interval, eddy generating (August 4, 2014–August 19, 2014), eddy maturing (August 20, 2014–October 12, 2014), and eddy terminating (October 13, 2014–October 29, 2014). The formation and extinction features throughout the eddy's evolving process are confirmed by the change of the shape of the eddy,[26] as determined by the eddy tracking method described in Section
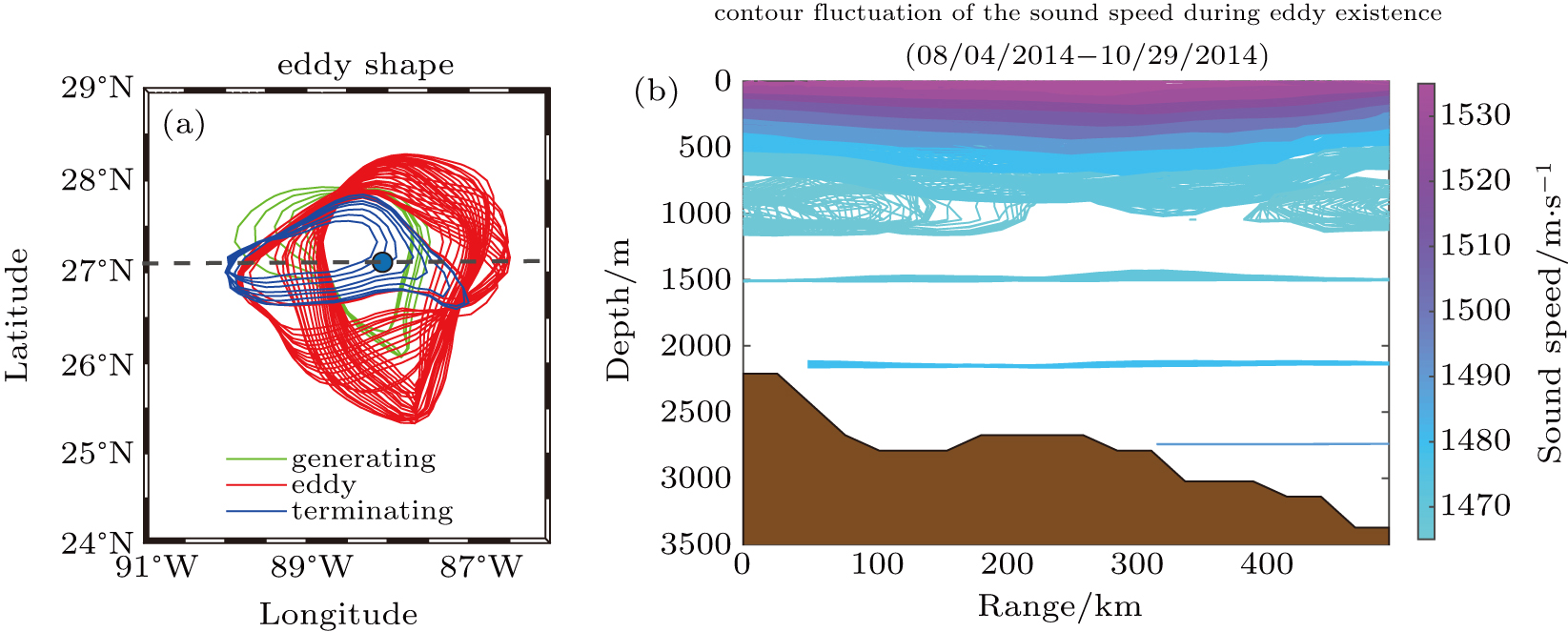 | Fig. 10. Example of eddy tracking. (a) The eddy shapes at three different time periods. (b) Superimposed contours of sound speed structure obtained during the whole existence of the warm eddy. |
The fluctuation of sound field in different periods along the propagation path is examined, as shown by the black-dashed line in Fig.
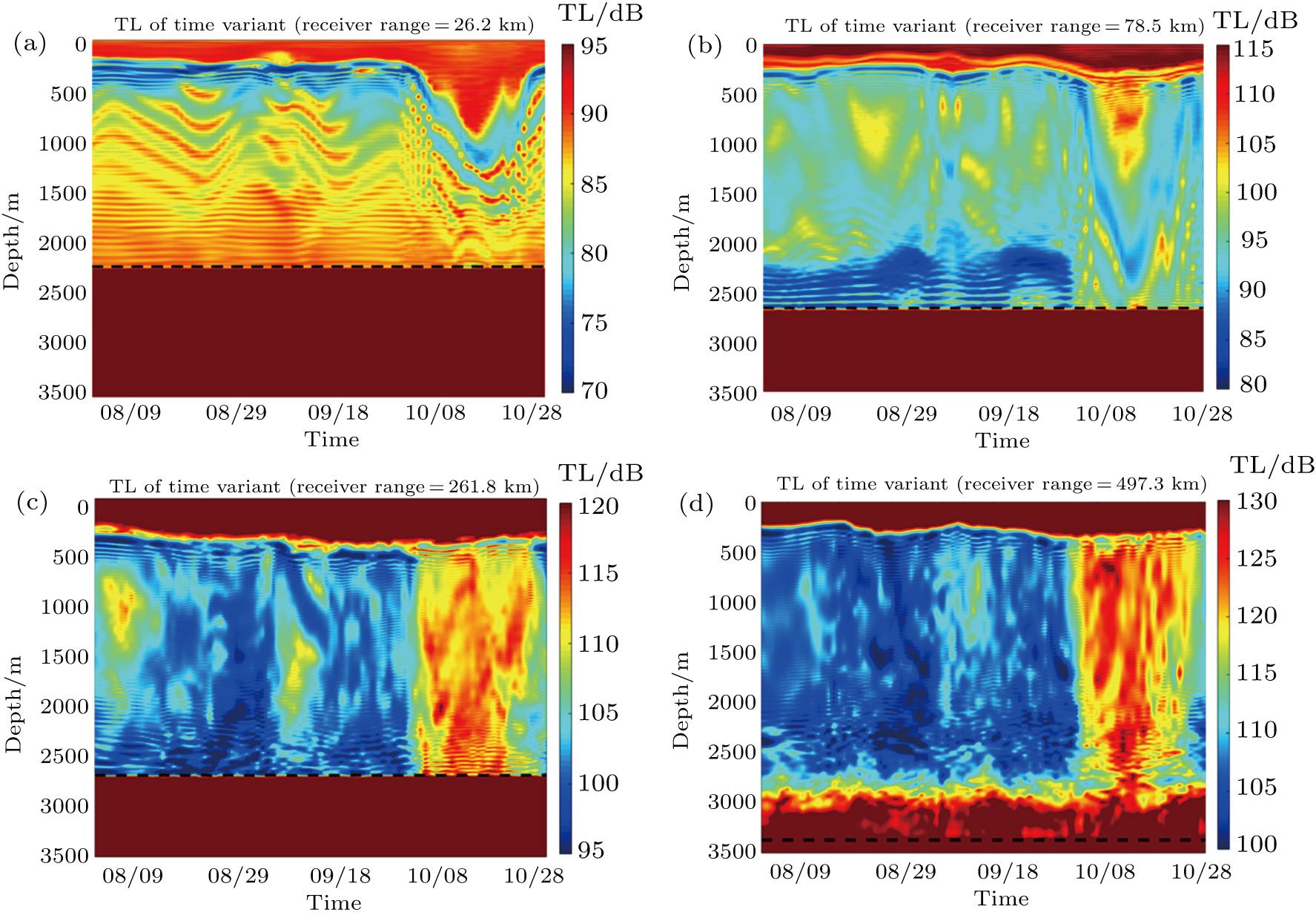 | Fig. 11. Fluctuations of the transmission loss vs. depths throughout the whole eddy lifespan at receiving ranges of (a) 26.2 km, (b) 78.5 km, (c) 261.8 km, and (d) 497.3 km. |
The maximum fluctuation of sound field significantly depends on the receiving distance. It can be found that the energy at the range of 497.3 km has the biggest change during the eddy's lifespan, followed by 261.8 km, while it will be much smaller at 26.2 km. Although at different receiving distances, the maximum fluctuation of acoustic field varies significantly, there are some similarities. The energy demonstrates rich variety before and after October 2. The energy disturbance caused by the change of the warm eddy is oscillating and will not exceed 15 dB before that day. However, the received energy has sharply decreased ever since.
As shown in Fig.
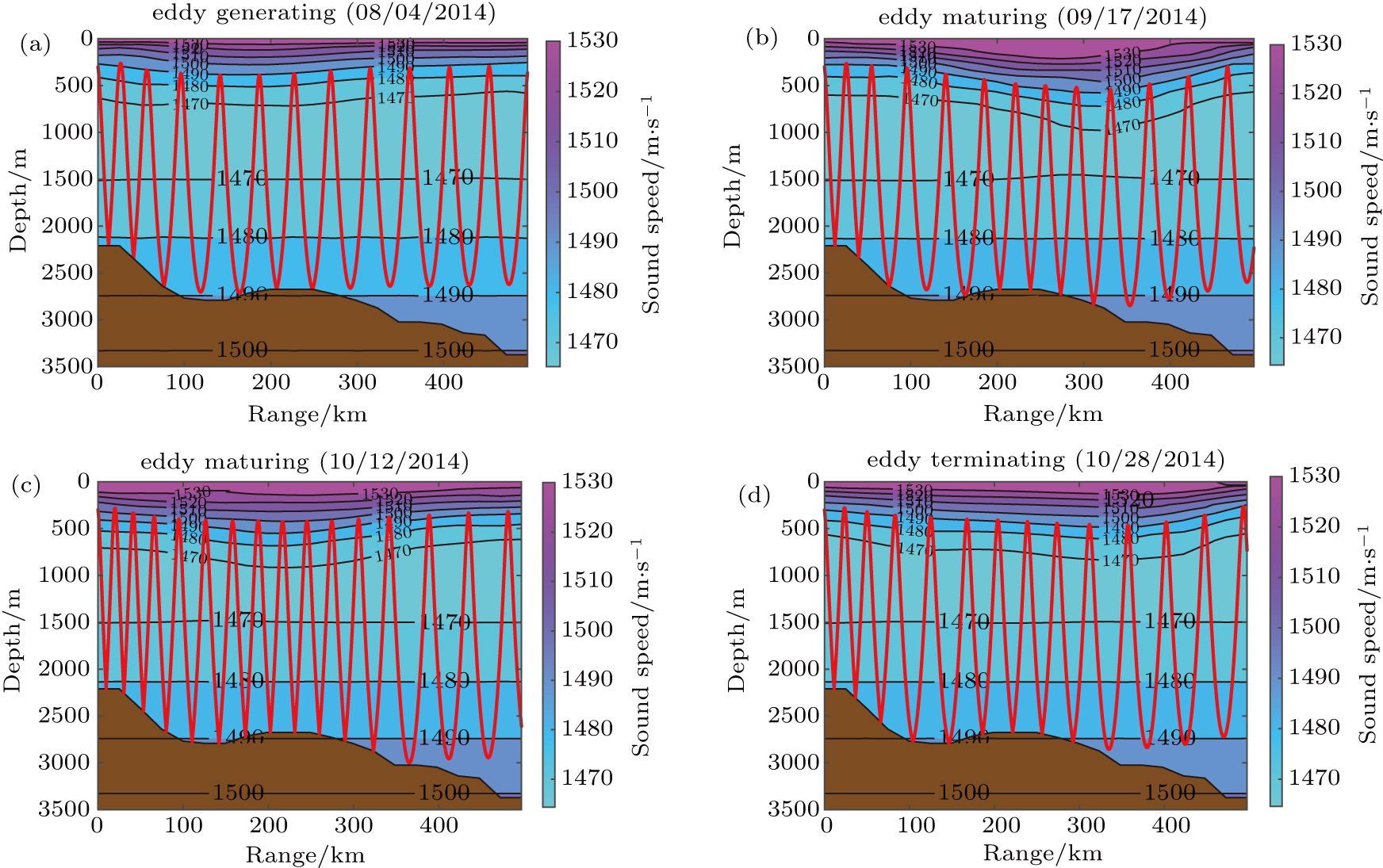 | Fig. 12. Sound speed disturbance colormap with sound ray explanation at four different periods of a warm eddy: (a) eddy generation, (b) eddy maturing with small attenuation, (c) eddy maturing with strong attenuation, and (d) eddy terminating. |
Although the eddy remains stable, the acoustic energy is strongly attenuated by the seabed from October 2 to October 12. As shown in Fig.
5. Conclusions and further studies
In this study, an automatic detection method in combination with satellite remote sensing data and CMEMS data is used to identify and track eddies in the Gulf of Mexico. Physical parameters of the eddies, such as lifespan, radius, and distribution position are first examined and used to determine the spatio-temporal evolution of a strong warm eddy separated from the Mexico current. Then, the parabolic equation method is used to comprehensively analyze the influence of this strong warm eddy on sound propagation during its lifespan. Furthermore, the normal mode and ray theories, the total depth-integrated energy and single mode as initial field method, and the receiving arrival angle are all used to explain and understand the effect of warm eddies on acoustic propagation. Based on the methods and models that are used for analysis, the following conclusions have been obtained.
(i) The location of the convergence area, the depth of reversal, and the energy propagation path vary significantly with the existence of eddies compared with background environment. The results show that the warm eddies can disperse the sound energy, change the propagation paths, cause the convergence zone to approach the sound source, and broaden the convergence zone. Moreover, the mode coupling caused by the warm eddy contribute to redistribution amongst normal modes and the change of the acoustic propagation path.
(ii) The effects of the warm eddies on the sound speed, acoustic propagation path, and arrival angle remain active at the scale of eddy existence.
(iii) Throughout the whole of these three periods (eddy generating, eddy maturing, and eddy terminating), the fluctuation in the transmission loss is up to 30 dB and presents different features. The results show that the sound speed fluctuation is a critical factor to cause the energy oscillating disturbance, while the energy propagation path change is mainly triggered by the relative location change between the eddy and source, so that the acoustic energy is strongly attenuated by the seabed.
(iv) The receiving arrival angle is an important parameter in understanding the divergence effect of warm eddies on acoustic propagation.
However, it should be noted that, for the sake of simplicity, the three-dimensional effects caused by mesoscale eddies have not been taken into account in the current study. Further developments may consider this point. In addition, more physical characteristics of mesoscale eddies can be further determined to potentially create more realistic modes for dynamic eddies throughout their lifespan.
Acknowledgment
The authors would like to thank Prof. Jixun Zhou, Ph.D. candidate Nick Durofchalk in Georgia Tech, and Dr. Jun Tang in Harbin Engineering University for their invaluable suggestions and discussions. The authors would also like to thank Prof. Changming Dong and Prof. Sen Wang from Nanjing University of Information Science and Technology for sharing the eddy detection and tracking code.
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] | |
| [21] | |
| [22] | |
| [23] | |
| [24] | |
| [25] | |
| [26] |