









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
UAV flight test of plasma slats and ailerons with microsecond dielectric barrier discharge
Cite this Article
Su Zhi, Li Jun, Liang Hua, Zheng Bo-Rui, Wei Biao, Chen Jie, Xie Li-Ke. UAV flight test of plasma slats and ailerons with microsecond dielectric barrier discharge. Chinese Physics B, 2018, 27(10): 105205 
Permissions
UAV flight test of plasma slats and ailerons with microsecond dielectric barrier discharge
† Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant Nos. 51336011 and 51607188), the China Postdoctoral Science Foundation (Grant No. 2014M562446), and the PhD Research Startup Foundation of Xi’an University of Technology (Grant No. 256081802).
Abstract
Plasma flow control (PFC) is a promising active flow control method with its unique advantages including the absence of moving components, fast response, easy implementation, and stable operation. The effectiveness of plasma flow control by microsecond dielectric barrier discharge (μs-DBD), and by nanosecond dielectric barrier discharge (NS-DBD) are compared through the wind tunnel tests, showing a similar performance between μs-DBD and NS-DBD. Furthermore, the μs-DBD is implemented on an unmanned aerial vehicle (UAV), which is a scaled model of a newly developed amphibious plane. The wingspan of the model is 2.87m, and the airspeed is no less than 30m/s. The flight data, static pressure data, and Tufts images are recorded and analyzed in detail. Results of the flight test show that the μs-DBD works well on board without affecting the normal operation of the UAV model. When the actuators are turned on, the stall angle and maximum lift coefficient can be improved by 1.3° and 10.4%, and the static pressure at the leading edge of the wing can be reduced effectively in a proper range of angle of attack, which shows the ability of μs-DBD to act as plasma slats. The rolling moment produced by left-side μs-DBD actuation is greater than that produced by the maximum deflection of ailerons, which indicates the potential of μs-DBD to act as plasma ailerons. The results verify the feasibility and efficacy of μs-DBD plasma flow control in a real flight and lay the foundation for the full-sized airplane application.
1. Introduction
Flow separation is an important problem which is widely concerned in aviation. Once the flow over aircraft has been separated properly, great lift will be lost and drag will increase. Therefore, the control of flow separation is important for the better performance of aircraft.[1–4]
Plasma flow control (PFC) is a promising active flow control method with fast response, simple structure, and broad frequency band, and able-to-suppress the boundary layer separation effectively.[5–8] Since Roth first employed One Atmosphere Uniform Glow Discharge Surface Plasma as boundary layer separation control devices,[9] a large number of researches dealing with dielectric barrier discharge (DBD) actuators have been conducted.[9–25] The DBD actuators driven by alternating-current high-voltage (AC-DBD) are studied most.[12–17] The stall angle of an NACA 0015 wing model can be improved by 7° at a freestream velocity of 30 m/s with AC-DBD.[17] The DBD actuators driven by nanosecond pulses can concentrate their power in several to tens of nanoseconds and create the rapid localized heating of the gas layer near the surface,[20] which has a good flow control performance with Mach number up to 0.74.[18–25] Although the flow control effect[16] and the global flow response[25] of AC-DBD and NS-DBD are similar, and the question remains over which of them is better, there is a great potential for the NS-DBD in separation control. However, the NS-DBD may generate severe electromagnetic interference (EMI) and disable other devices (like computers, servo motors, and flight control systems) without being properly protected. Whether such actuators can be used in real flight and whether they work well without destroying the airborne equipment is still unknown. Therefore, flight tests are necessary to verify the feasibility of PFC before putting it into practical application.
Several flight tests using AC-DBD as the flow control method have been reported. Sidorenko applied AC-DBD to a real flight in 2008, but the results of flow control were not explicit.[26] In 2009, Grundman compared the stall speed of an unmanned aerial vehicle (UAV) between plasma actuation on and off by the statistical method and verified the control efficacy of AC-DBD.[27] In 2014, Friedrichs built a PFC flight testing platform and introduced the process in detail, but no result of the flight test was given.[28] In 2016, Zhang conducted a UAV flight test with AC-DBD plasma flow control. The variation of roll angle and the static pressure of the leading edge were recorded and analyzed.[29] So far, the airspeed in the flight tests is within 20 m/s, and the flight altitude is low, which is very different from the conditions of real planes. Meanwhile, there are only qualitative results or preliminary quantitative results to show the efficacy of PFC in flight, and no flight test is conducted with DBD actuators driven by high-voltage pulses (pulsed-DBD) like NS-DBD which has good flow control performance from low speed (Ma ≤ 0.1)[21,25] to the high subsonic conditions (Ma = 0.74).[18] To pave the way to the practical application, more comprehensive and quantitative data of flight tests must be acquired, and the feasibility of pulsed-DBD in real flight needs to be proved.
In the present study the typical NS-DBD is modified with a pulse rising time of several-to-tens of nanoseconds by relaxing the pulse rising time to 700 ns to remit the EMI. The pulse rising time of these modified pulses is close to 1 μs so the actuators driven by these pulses are defined as microsecond dielectric barrier discharge (μs-DBD) actuators. In this paper, the flow control ability of μs-DBD and typical NS-DBD are compared in the wind tunnel tests. The μs-DBD is applied to a real flight with a scaled model of a certain type of amphibious plane to study its practical application efficacy. The airspeed of the scaled model is larger than 30 m/s. In this process, a miniaturized microsecond high-voltage pulse generator is designed to feed the actuators and fit the limited cabin capacity of the scaled model. Abundant flight attitude data, wing pressure data together with tufts images are recorded and analyzed systematically to demonstrate the flow control efficacy comprehensively.
2. Experimental setup
2.1. Flight testing model
A scaled model of a certain type of amphibious plane is chosen as a flight testing model, as shown in Fig.
 | Fig. 1. (color online) Scaled model showing (a) arrangement of airborne facilities and (b) coordinate setup. |
2.2. DBD plasma actuator
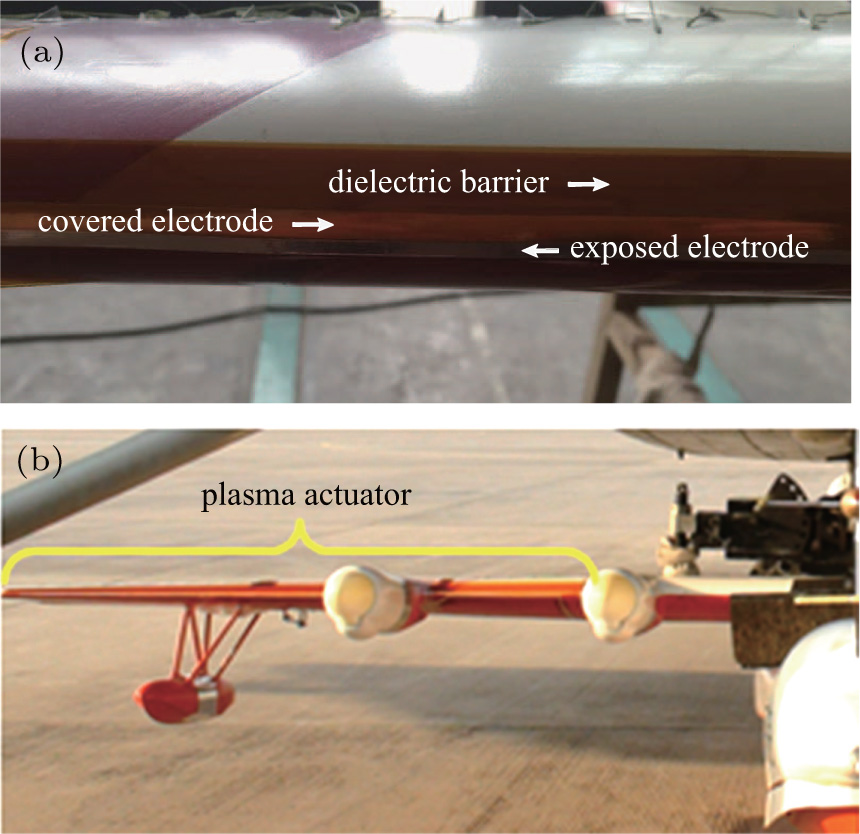
The DBD plasma actuator consists of two copper electrodes separated by a dielectric barrier with no overlap, as illustrated in Fig.
 | Fig. 2. (color online) DBD plasma actuator, showing (a) configuration and (b) location of plasma actuator. |
2.3. Microsecond high-voltage pulse generator
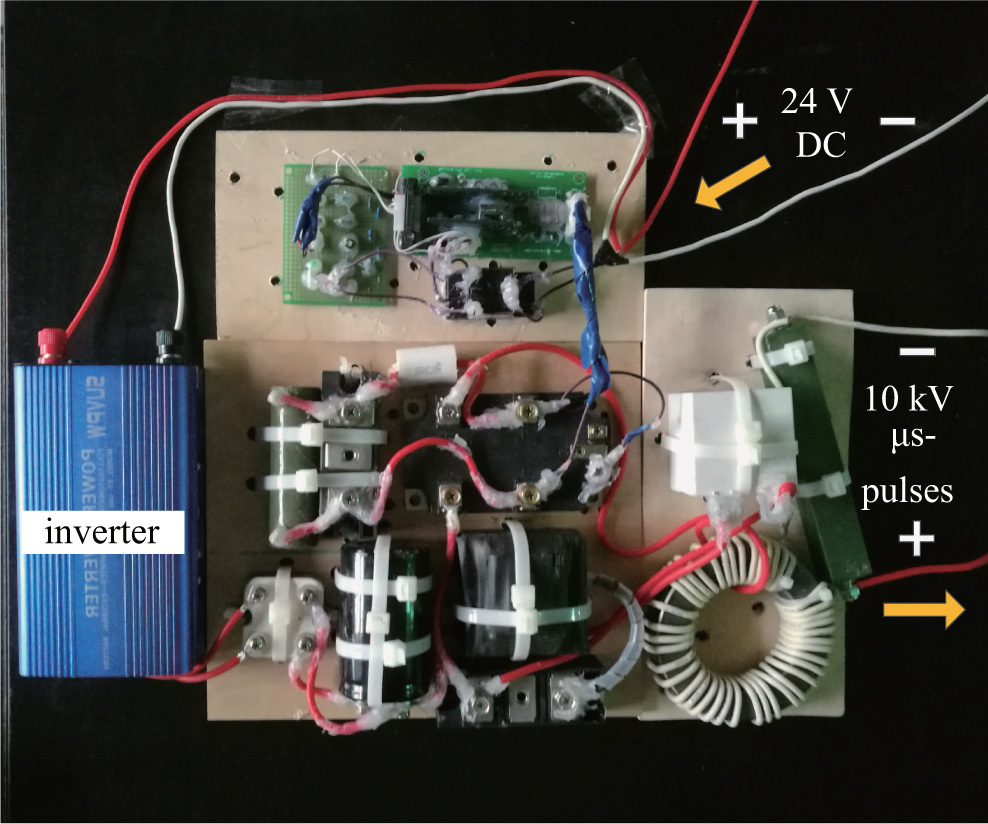
The cabin capacity of the scaled model is limited within 0.01 m3 and batteries are the only power supply in the model. So, a specialized small-sized high-voltage generator is designed to generate the microsecond high-voltage pulses on board as shown in Fig.
 | Fig. 3. (color online) Microsecond high-voltage pulse generator. |
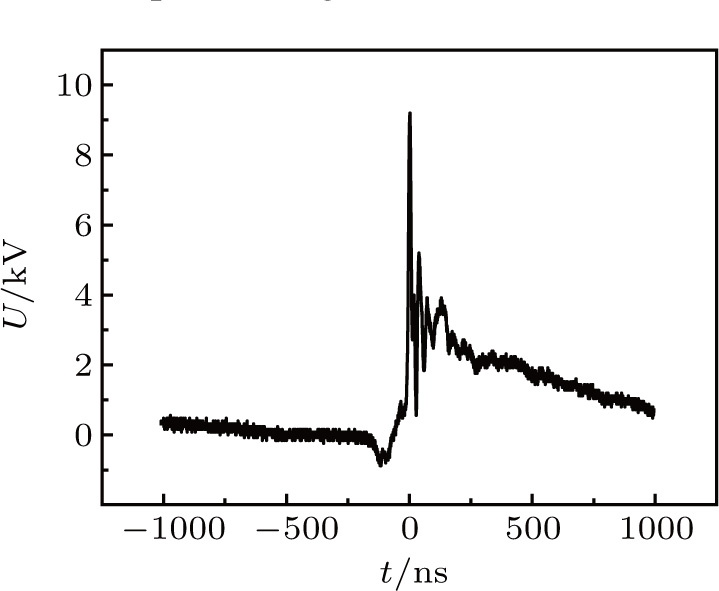
 | Fig. 4. Voltage waveform of a microsecond pulse. |
| Table 1. The sizes of different parts of microsecond high-voltage pulse generator. . |
The circuit of the high-voltage generator consists of three parts, as shown in Fig.
 | Fig. 5. (color online) Circuit of microsecond high-voltage pulse generator. |
2.4. Measuring methods
Two circuit boards equipped with fourteen MS5611-01BA03 static pressure sensors on each board are placed chordwise with 0.47 m from the wing tip on either side of the wing because there is the largest variation of static pressure before and after actuation at that airfoil section. The first sensor is 35 mm away from the leading edge, and the distance between adjacent sensors is 10 mm for the 1st to 12th sensors and 15 mm for the 12th to 14th sensors as shown in Fig.
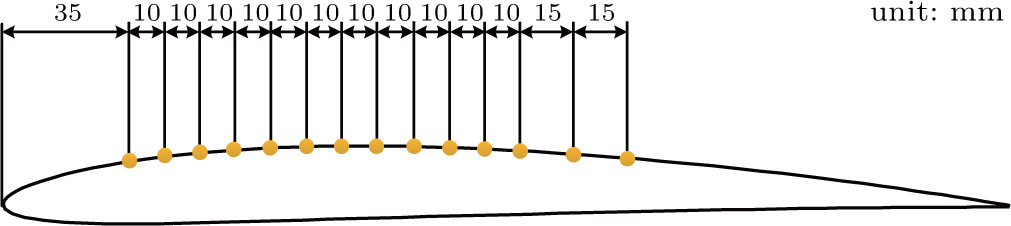 | Fig. 6. (color online) Distribution of pressure sensors. |
3. Results and discussion
3.1. Wind tunnel test
According to the Maxwell equation, fluctuation of voltage and current can produce an electromagnetic wave. For the airborne devices, the electromagnetic wave also means EMI. The shorter the pulse rising time, the stronger the EMI will be due to the stronger fluctuation of pulse voltage.[30,31] Thus, to alleviate EMI, the pulse rising time of NS-DBD is relaxed from a few nanoseconds to tens of nanoseconds to about one microsecond, producing the discharge called μs-DBD. Although the EMI is reduced, it is not sure whether this method of increasing pulse rising time will damage the flow control effect. So, the flow control effects of μs-DBD and NS-DBD with pulse rising time of 700 ns and 10 ns respectively are compared with a typical NACA 0015 airfoil in the wind tunnel test.
The test is conducted in a low-speed wind tunnel at Air Force Engineering University with a typical NACA 0015 airfoil as shown in Fig.
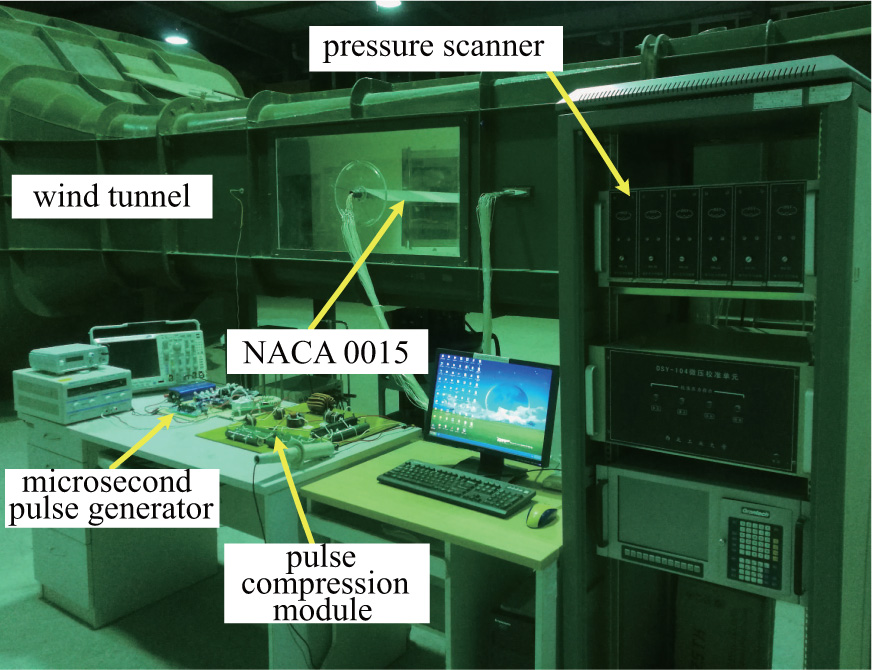 | Fig. 7. (color online) Wind tunnel test setup. |
The small-sized microsecond pulse generator and a nanosecond pulse generator that generates pulses with a pulse rising time of 10 ns are used in the wind tunnel test to make a comparison. The output waveform of the nanosecond pulse generator is shown in Fig.
 | Fig. 8. Voltage waveform of a nanosecond pulse. |
 | Fig. 9. (color online) Pulse compression module, showing (a) circuit and (b) photograph of the pulse compression module. |
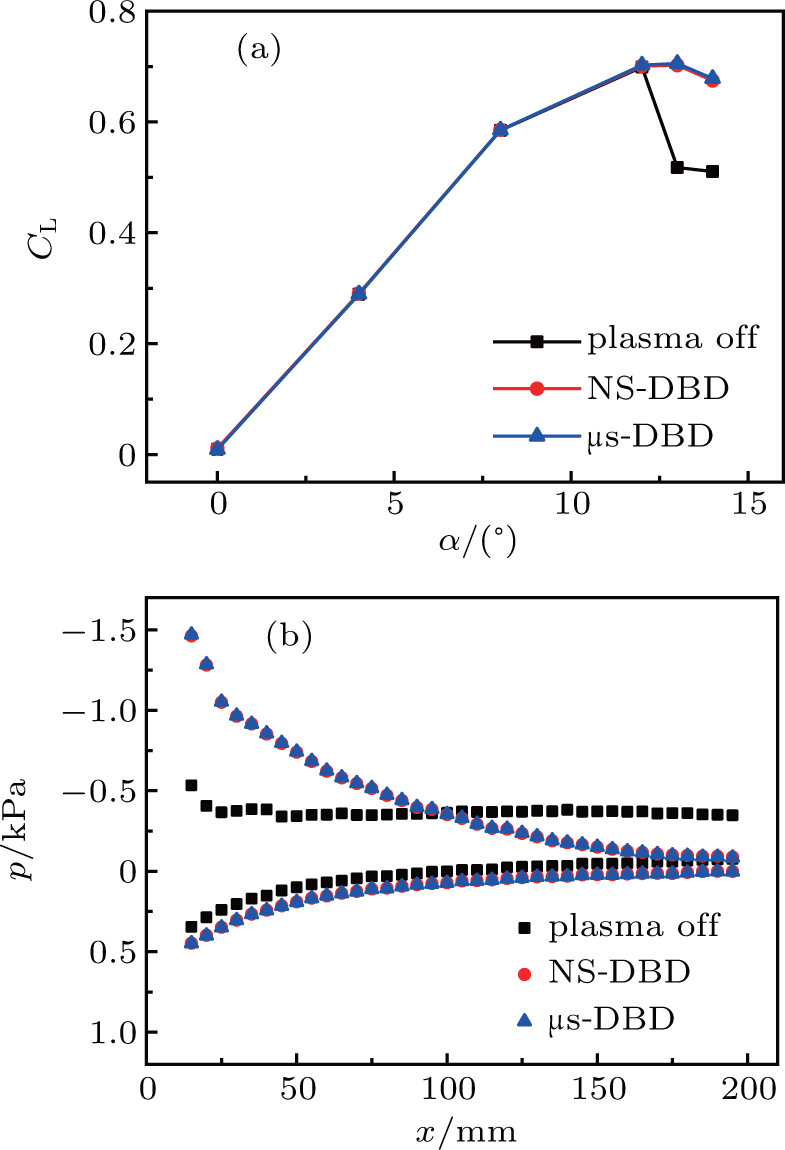
The lift coefficient curves and pressure distributions of the airfoil with and without plasma actuation are compared in Fig.
 | Fig. 10. (color online) Comparison between flow control effects with NS-DBD and μs-DBD, showing (a) lift coefficient curves and (b) pressure distribution curves at α = 13°. |
3.2. Flight test
To verify the practical application capability of μs-DBD and simulate the function of typical slats and ailerons, flight tests of μs-DBD with two actuation configurations are conducted. Firstly, actuators on either side of the wing are turned on, which is called bilateral actuation. Then, the actuator at the left wing is turned on, which is named left-side actuation. The bilateral actuation configuration is designed to demonstrate the overall lift enhancement, stall delay, and pressure variation of the wing surface caused by the plasma actuation, which is similar to the function of typical slats. The left-side actuation configuration aims to highlight the control of varying the roll angle of plasma actuation through flight attitude change and to verify the capability of μs-DBD actuators to act as plasma ailerons in real flight. When the actuator of the left wing is turned on, the lift of the left wing will be improved, but the lift of the right wing is still the same, which will produce a rolling moment and make the model roll to the right.
During the flight test, the model is adjusted to level flight right after being released. Then, the plasma actuation is turned on. The model is controlled to increase its angles of attack gradually with bilateral actuation or left-side actuation. When the model stalls due to a large angle of attack, it is controlled to pitch down quickly and recovers to level flight. The model can pitch up and down four times before it reaches an altitude of 600 m where the plasma actuation is turned off. When the model continues gliding and reaches an altitude of 400 m, the parachute is opened, and the model lands slowly. The remote control and servo motors are slightly interfered by the μs-DBD during the flight, but this does not affect the normal operation of the whole aircraft.
3.2.1. Lift coefficient analysis1(b) respectively. Both the data points of the lift coefficient calculated, and the lift coefficient curves acquired by polynomial fitting are shown in Fig. 11 . The baseline statistics are acquired from the clean wing before any actuator is applied.
Based on the overload (n), angle of attack, density of the air (ρ), and airspeed (v) recorded by the AFCS, together with the mean aerodynamic chord (ca) and the weight (W) of the UAV model, the lift coefficient of the model can be calculated with the following equation acquired with force analysis:

 | Fig. 11. (color online) Plots of lift coefficient versus angle of attack in the cases with and without plasma actuation in flight. |
When the angle of attack is less than 5°, the lift coefficient of the baseline increases linearly with the angle of attack and the lift coefficient with bilateral actuation is slightly less than that of the baseline condition. This is because no conspicuous flow separation exists at such an angle of attack, and the lift coefficient cannot be improved by plasma actuation through separation control. However, the shape of the airfoil leading edge is changed slightly because of the presence of plasma actuators and deviates from the designed condition, which causes the lift loss. When the angle of attack is greater than 5°, the growth of lift coefficient turns slower, and the lift coefficient reaches a maximum value at the stall angle αstall = 8.7° due to severe flow separation without plasma actuation. After that, the lift coefficient drops sharply and the UAV model stalls. When the actuators on both sides are turned on, the flow separation is suppressed effectively, and the lift coefficient increases substantially. The stall angle and maximum lift coefficient are increased by 1.3° and 10.4%, respectively, which shows a remarkable flow control performance of μs-DBD in real flight. Such a phenomenon is similar to the effect of typical slats so the bilateral μs-DBD actuator is defined as plasma slats. The μs-DBD actuator has a simpler structure, better flexibility, and it is much easier to achieve closed-loop control than with the mechanical slats.
3.2.2. Flight attitude analysis
To verify the rolling control capability of μs-DBD and show the lift enhancement generated by plasma actuation in an intuitional way, test groups with left-side actuation are implemented and flight data including angle of attack, roll angle (ϕ), roll angular velocity (ω), and deflection of ailerons (δ) are recorded. During the tests, the UAV model operates in the automatic trim mode, in which the ailerons will deflect automatically, trying to keep the roll angle at about 0°. The flight attitude variations of a typical test group are shown in Fig.
 | Fig. 12. (color online) Variations of flight attitude with left-side actuation. |
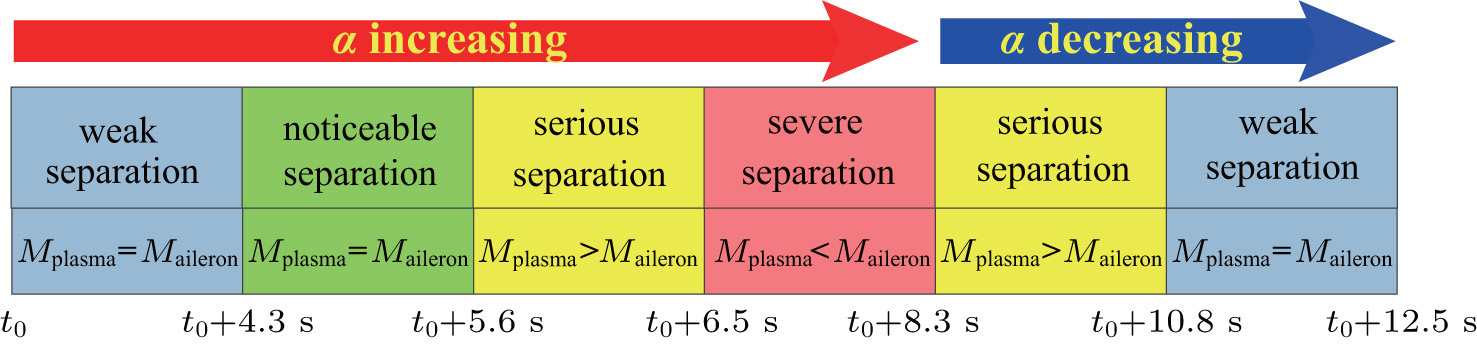
The variation for each of flow separation condition and rolling moment with the change of angle of attack in a typical test group can be divided into six stages. The time point of t = 717.5 s when the model begins to increase its angle of attack is taken as t0. The six stages are divided with yellow dash–dotted lines in Fig.
When the time is smaller than t0 + 4.3 s (t0 ≤ t < t0 + 4.3 s), the angle of attack is smaller than 8° (α < 8°). The flow separation is weak, and the lift losses caused by the separation are relatively small. The plasma actuation cannot produce considerable lift improvement by suppressing flow separation, so the lift on each side of the wing is nearly the same. The lift difference between the two sides of the wing can be offset easily by the moderate deflection of ailerons. Therefore, the model keeps flying horizontally and the aileron deflecting angle fluctuates gently around 0°.
In the time period from t0 + 4.3 s to t0 + 5.6 s (t0 + 4.3 ≤ t < t0 + 5.6 s), the angle of attack becomes larger (8° ≤ α < 12°), and considerable flow separation appears. The separation on the left wing is controlled by the μs-DBD but it is still uncontrolled at the right wing. Thus, the lift of the left wing becomes greater than that of the right wing and a rightward rolling moment Mplasma is formed, which results in a positive roll angular velocity. To balance Mplasma and return to horizontal flight, the ailerons obtain negative deflection, which produces a revising moment Maileron. In this condition, the separation becomes noticeable but the rolling moment Mplasma produced by the left-side actuation can still be revised when the deflection of ailerons turns larger. As a result, the fluctuation of roll angular velocity and aileron deflection becomes a bit violent while the roll angle keeps about 0°. In the process, the negative deflection of ailerons increases gradually, which means that the flow separation keeps aggravating and Mplasma keeps rising, and thus requiring larger aileron deflection for balance.
In the time period from t0 + 5.6 s to t0 + 6.5 s (t0 + 5.6 s ≤ t < t0 + 6.5 s), the angle of attack increases to 12° (12° ≤ α < 21°). Flow separation turns serious, leading to the significant lift loss. The Mplasma rises sharply and keeps larger than Maileron though the ailerons reach a maximum deflecting angle of −20° rapidly for revising at t = 723.6 s = t0 + 6.1 s. The ailerons can no longer revise Mplasma on this condition. Both the roll angle and angular velocity rise quickly, and the UAV model speeds up rolling positively. The great rolling moment is generated by the μs-DBD actuation on the left side of the wing. The moment produced by μs-DBD is larger than that produced by the maximum deflection of ailerons, which shows the potential of μs-DBD plasma actuators to strengthen or replace the ailerons and improve the maneuverability as well as simplify the aircraft in an appropriate range of angles of attack (12° ≤ α < 21° in this test).
In the time period from t0 + 6.5 s to t0 + 8.3 s (t0 + 6.5 s ≤ t < t0 + 8.3 s), the angle of attack becomes much larger (21° ≤ α < 28.7°), reaching a maximum value of 28.7° at t = 725.8 s = t0 + 8.3 s. The flow separation becomes severe and much more difficult to control. The μs-DBD can no longer suppress the separation effectively, which makes Mplasma decrease significantly. As a result, Mplasma turns smaller than Maileron with the aileron deflection being a maximum value. The roll angular velocity decreases and the positively rolling slows down. When t = 724.9 s = t0 + 7.4 s, the model stops rolling positively with a roll angle of 50.8° and begins to roll negatively.
In the time period from t0 + 8.3 s to t0 + 10.8 s (t0 + 8.3 ≤ t < t0 + 10.8 s), the aileron deflection begins to decrease because of the negative rolling and reaches a minimum value of −7.1°, which makes Maileron decrease significantly. The angle of attack also begins to decrease, and the flow separation becomes alleviated. The μs-DBD regains the ability to enhance the lift, and causes Mplasma to rise. Thus, Mplasma becomes larger than Maileron again. The roll angular velocity begins to increase, and the negatively rolling slows down. At t = 726.6 s = t0 + 9.1 s, the model begins to roll positively, and the aileron deflection increases to a maximum value again to resist the positive rolling. However, because Mplasma keeps increasing with the decrease of the angle of attack, it has become larger than the maximum value of Maileron at that time. So, the model speeds up rolling with the maximum aileron deflection again.
When the time is larger than t0 + 10.8 s (t0 + 10.8 s ≤ t < t0 + 12.5 s), the angle of attack drops sharply. The separation recedes and becomes mild. Mplasma disappears while Maileron still keeps negative. The positive rolling slows down, reaching a maximum roll angle of 110.3° at t = 729 s = t0 + 11.5 s. Then, the ailerons try to adjust the model to horizontal flight from the huge roll angle of 110.3°, causing the roll angle and angular velocity to greatly fluctuate. Finally, the roll angle returns to 0° at t = 730 s = t0 + 12.5 s, and the flight model recovers to horizontal flight. The whole process is described in Fig.
 | Fig. 13. (color online) Different stages of test group with left-side actuation. |
3.2.3. Tufts image analysis
As shown in Fig.
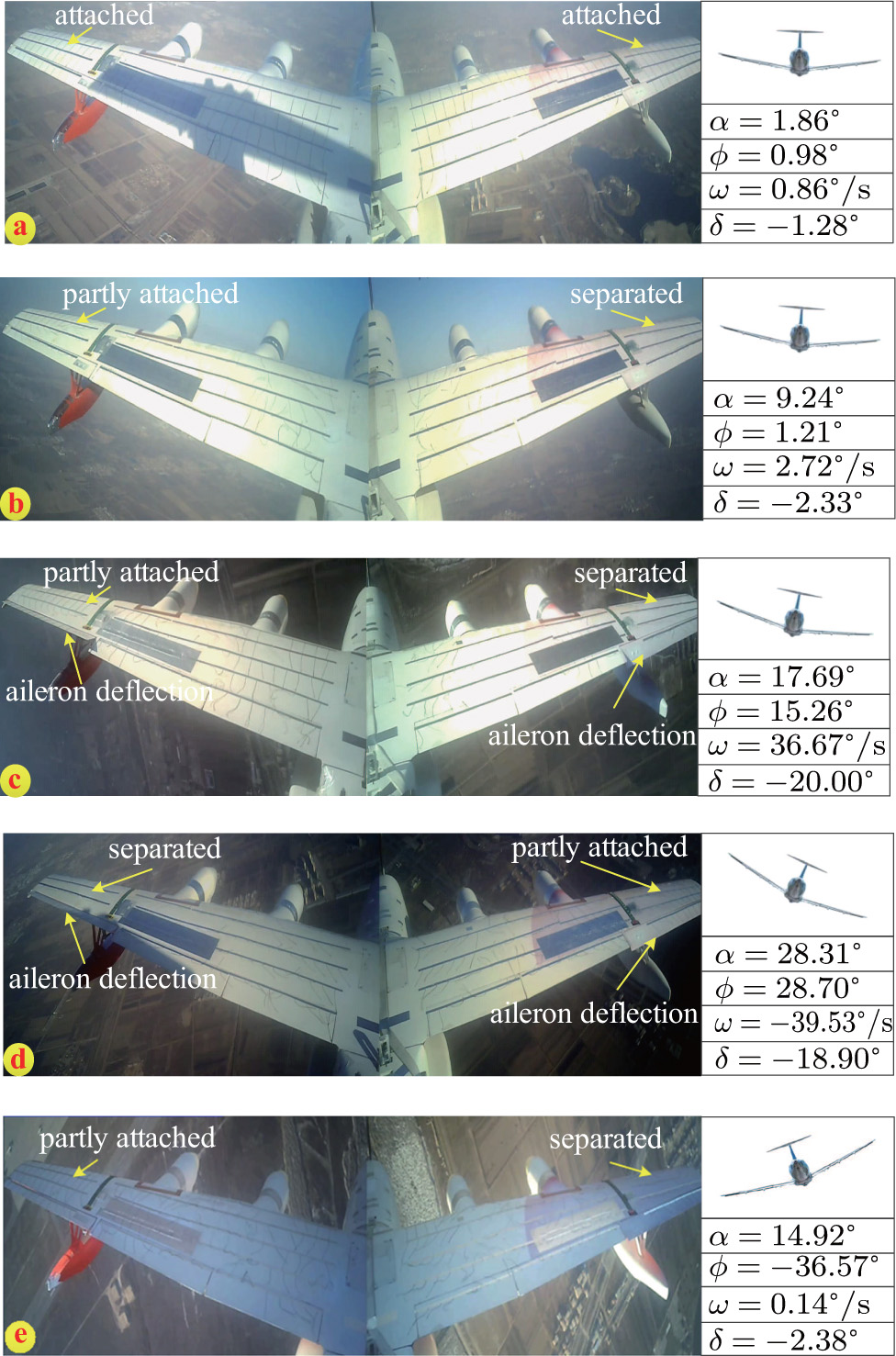 | Fig. 14. (color online) Tufts’ images with left-side actuation at (a) α ≤ 8°, (b) 8°≤ α < 12°, (c) 12° ≤ α < 21°, (d) 21° ≤ α < 28.7°, and (e) angles of attack decreasing. |
When α < 8°, nearly all the tufts are straight and attached to the wing surface as indicated in Fig.
When 8° ≤ α < 12°, a considerable flow separation appears, and the separation condition of the left wing is better than that of the right wing due to the left-side actuation. This can be seen from the tufts at the outer part of the wing. Most of the tufts at the left wing are attached while those at the right wing are erect, as shown in Fig.
When 12° ≤ α < 21°, serious asymmetric separation happens under the left-side actuation and the flight model begins to roll to the right. The positive roll angular velocity gives a downward velocity component to the incoming flow of the left wing and makes the local angle of attack of the left wing decrease. The incoming flow of the right wing obtains an upward velocity component, making the local angle of attack of the right wing increase. For the left wing, the local angle of attack is small, so that the separation can be easily suppressed by the plasma actuation. Most of the tufts of the left wing are attached. For the right wing, the local angle of attack is large, and the plasma actuator there is turned off. Thus, the separation there is serious and cannot be suppressed. As a result, the tufts of the right wing are upright and wobbly. The combined influence of left-side plasma actuation and the different local angles of attack between two sides of the wing produce the different separation conditions. The ailerons obtain a maximum negative deflection to resist the rolling, as shown in Fig.
When 21° ≤ α < 28.7°, the angle of attack reaches a maximum value and the μs-DBD loses the ability to suppress separation. The rightwards rolling slows down and the model begins to roll to the left, which makes the local angle of attack of the left wing increase and that of the right wing decrease. Thus, the boundary layer of the left wing becomes separated, and much more difficult to control due to the large local angle of attack, while that of the right wing becomes attached due to the small local angle of attack. The tufts of the left wing become erect, but part of the tufts of the right wing are attached due to the combined effect of local angles of attack and plasma actuation, as shown in Fig.
When the angle of attack begins to decrease, the μs-DBD regains the flow control authority. The separation at the left wing is suppressed again, and the rightwards rolling reappears. The tufts of the left wing are attached while those at the right wing are upright, as shown in Fig.
3.2.4. Wing pressure analysis
Tufts’ images can only qualitatively display the flow field. To assess the flow field more quantitatively, the static pressure of the wing surface is recorded and analyzed.
The pressure variations in the cases with and without actuation of the first pressure sensor p1 at either side of the wing are shown in Fig.
 | Fig. 15. (color online) Variations of pressure with time in the cases of (a) plasma off and (b) bilateral actuation. |
With the actuators turned off, the pressure at either side begins to rise at α ≈ 5°, which means that the static pressure at the surface of the airfoil profile with pressure sensors begins to increase and flow separation appears. When the angle of attack continues to increase, the pressure reaches a relatively high value at α ≈ 15° and keeps fluctuating around that value, which indicates that the airfoil falls into deep separation.
When the actuators on both sides are turned on, the pressure keeps at a relatively low value at α ≈ 5° and does not begin to rise until α ≈ 14°. The pressure keeps at a relatively low value between α ≈ 5° and α ≈ 14°. With the angle of attack increasing, the pressure reaches a relatively high value at α ≈ 20°. The flow separation is suppressed effectively in an appropriate range of angle of attack (5° < α < 14°). Because the static pressure variation of one point of the wing cannot represent the overall stall condition, the range of angle of attack in which the μs-DBD works is different from that in the lift coefficient analysis. However, this result can still reflect the efficacy of μs-DBD to act as plasma slats more quantitatively.
The pressure distribution of the wing surface is not acquired due to some unexpected problems with the pressure recording system. Following studies will fix this problem and make efforts to acquire more systematic pressure data.
4. Conclusions
In this paper, the flow control ability of μs-DBD is compared with that of typical NS-DBD in the wind tunnel tests and the feasibility and efficacy of μs-DBD are verified in the flight test with a scaled model of a certain type of amphibious plane. The wingspan of the model is 2.87 m, and the airspeed is no less than 30 m/s. During the tests, a miniaturized high-voltage generator with a volume and weight of 0.0066 m3 and 4 kg is designed to fit the limited cabin capacity; the flight data, the wing pressure data, and the tufts’ images are recorded and analyzed comprehensively.
The results show that the μs-DBD actuators work well in flight without influencing the overall operation of the aircraft and have good flow control performances both in the wind tunnel tests and flight tests. In the wind tunnel tests, the lift enhancement and pressure distribution improvement produced by the μs-DBD and NS-DBD are nearly the same with the stall angle increased by 1°. Thus, the μs-DBD is chosen in the flight test due to both its flow control ability being similar to the NS-DBD and the reduced EMI. In the flight test, the stall angle and maximum lift coefficient are increased by 1.3° and 10.4% with the μs-DBD, which shows the potential of μs-DBD actuators to delay the stall and act as the plasma slats in flight. Great asymmetric separation and the positive rolling moment are generated by the left-side μs-DBD actuation. The moment produced by the μs-DBD is larger than that produced by the maximum deflection of ailerons in an appropriate range of angle of attack (12° ≤ α < 21°), which demonstrates the ability of μs-DBD to act as plasma ailerons in real flight. Besides, the static pressure of the point at 47 cm away from the wing tip and 35 mm away from the leading edge decreases effectively in an appropriate range of angle of attack (5°< α < 14°), which verifies the efficacy of μs-DBD to suppress the flow separation more quantitatively. With these results, the practical application capability of the μs-DBD is verified comprehensively in diverse perspectives.
The next flights are aimed to gain more flight data with larger Reynolds numbers and verify the ability of plasma actuators to act as circulation-control devices.
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] | |
| [21] | |
| [22] | |
| [23] | |
| [24] | |
| [25] | |
| [26] | |
| [27] | |
| [28] | |
| [29] | |
| [30] | |
| [31] |