A new four-dimensional hyperjerk system with stable equilibrium point, circuit implementation, and its synchronization by using an adaptive integrator backstepping control
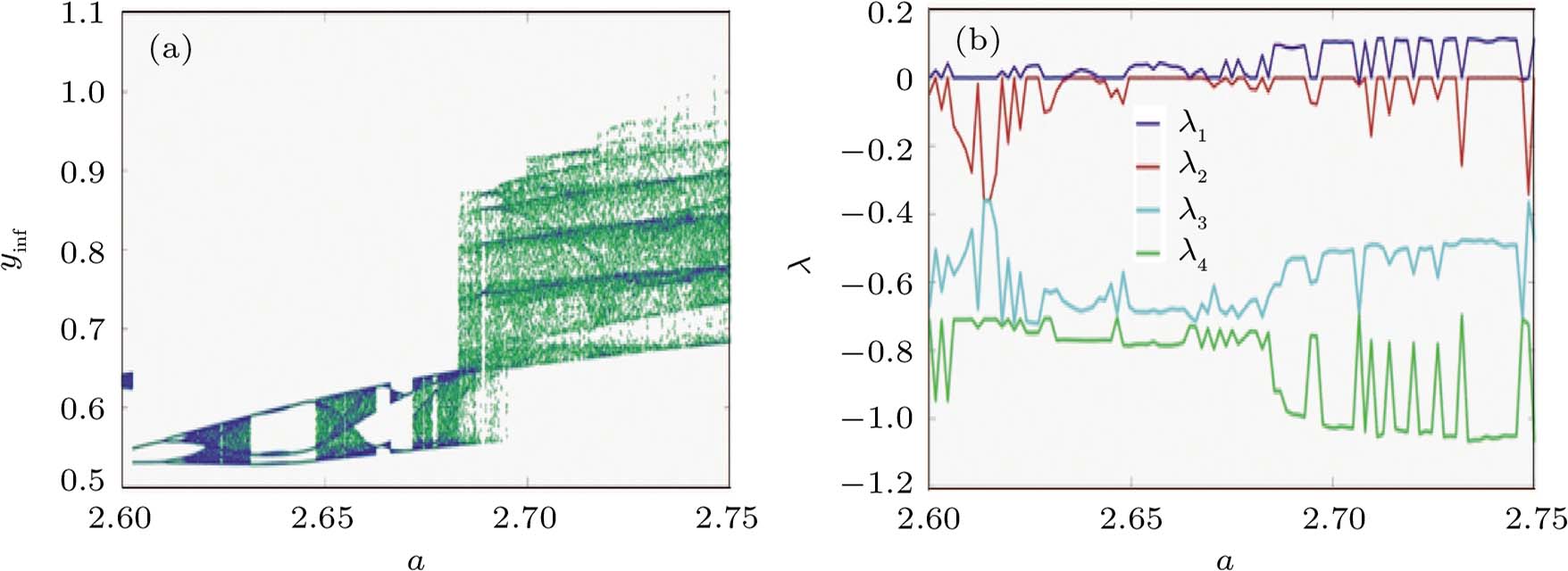
(color online) Bifurcation diagram and Lyapunov spectrum with the variation of parameter a ∈ [2.6, 2.75] and b = 1.43, c = 2.18, d = 6.11, f = 2.65, and g = 1.74.