A new four-dimensional hyperjerk system with stable equilibrium point, circuit implementation, and its synchronization by using an adaptive integrator backstepping control
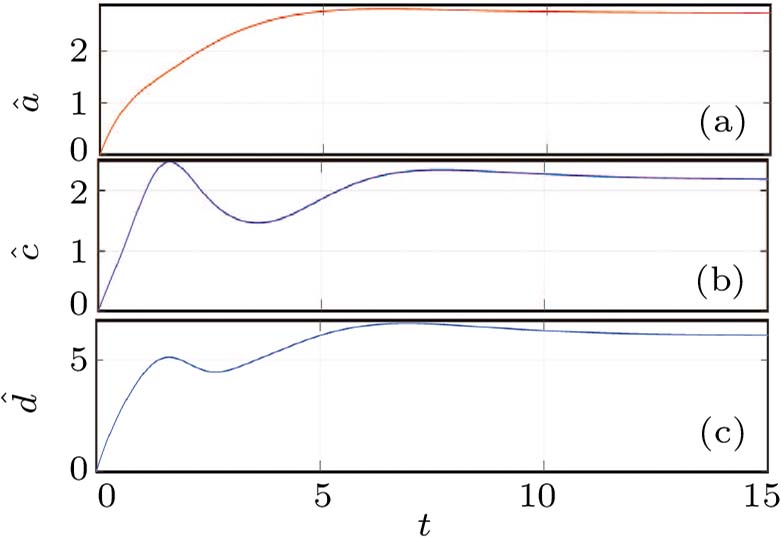
(color online) The estimation of the parameters a, b, and c of the master and the slave systems.