Distance-based formation tracking control of multi-agent systems with double-integrator dynamics
Project supported by the National Natural Science Foundation of China (Grant No. 61603188).
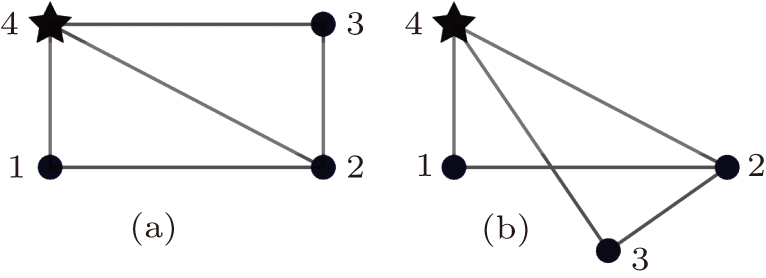
(color online) Flipped situation for the fixed topology with four agents and of five edges.