Wang Haibin, Liu Xiaozhou, Gao Sha, Cui Jun, Liu Jiehui, He Aijun, Zhang Gutian. Acoustic radiation force on a multilayered sphere in a Gaussian standing field. Chinese Physics B, 2018, 27(3): 034302
Permissions
Acoustic radiation force on a multilayered sphere in a Gaussian standing field
Wang Haibin1, Liu Xiaozhou1, 2, †, Gao Sha1, Cui Jun1, Liu Jiehui1, He Aijun3, Zhang Gutian4
Key Laboratory of Modern Acoustics, Institute of Acoustics, Nanjing University, Nanjing 210093, China
State Key Laboratory of Acoustics, Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China
School of Electronic Science and Engineering, Nanjing University, Nanjing 210023, China
Nanjing Drum Tower Hospital, The Affiliated Hospital of Nanjing University Medical School, Nanjing 210093, China
† Corresponding author. E-mail: xzliu@nju.edu.cn
Abstract
Abstract
We develop a model for calculating the radiation force on spherically symmetric multilayered particles based on the acoustic scattering approach. An expression is derived for the radiation force on a multilayered sphere centered on the axis of a Gaussian standing wave propagating in an ideal fluid. The effects of the sound absorption of the materials and sound wave on acoustic radiation force of a multilayered sphere immersed in water are analyzed, with particular emphasis on the shell thickness of every layer, and the width of the Gaussian beam. The results reveal that the existence of particle trapping behavior depends on the choice of the non-dimensional frequency ka, as well as the shell thickness of each layer. This study provides a theoretical basis for the development of acoustical tweezers in a Gaussian standing wave, which may benefit the improvement and development of acoustic control technology, such as trapping, sorting, and assembling a cell, and drug delivery applications.
In recent years, many theoretical and experimental studies have been performed on the acoustic radiation force exerted by a single ultrasonic beam on spherical objects.[1–9] The acoustic tweezers based on acoustic radiation force have become a well-known technique for trapping, sorting, and assembling microparticles (guiding and trapping minuscule particles).[4–13] In particular, in cellular and molecular biology, particle manipulation has been crucial in studying biomechanical properties of various cells and molecules. However, most of these particles mentioned in previous papers are single-layered spherical shell structures. In biomedical engineering and materials science, there are many particles with multiple-layered structures, for example, nanoparticle drugs and cells. In drug delivery applications,[14–17] using acoustic radiation can effectively manipulate polymer microspheres filled with liquid drugs, such that the shell is accurately broken and the drugs can be used in affected areas. A common cell is typically a multilayered tissue that contains a cell membrane, cytoplasm, and a cell nucleus. The acoustic properties of these layers are different; therefore, the study of acoustic radiation force on multilayered spherical shell structures has practical value for applications.
An acoustic standing field can be useful in microfluidic lab-on-a-chip applications, and researchers have calculated the radiation force function for plane and Bessel standing waves.[18–24] A Gaussian standing beam has been used to develop acoustic tweezers that can immobilize latex particles and frog eggs in a fixed position.[25] In this paper, we present a model to calculate the acoustic radiation force by a Gaussian standing wave upon a spherically symmetric multilayered sphere based on previous research.[11,26,27] Examples for the radiation force on two- and three-layered spheres with isotropic properties in each layer are studied for the radius ratio of different layered materials. This study shows that the theory developed in this paper provides a theoretical basis for multilayered spherical particle manipulation.
2. Theory
2.1. Expansion of incident Gaussian standing wave in terms of spherical functions
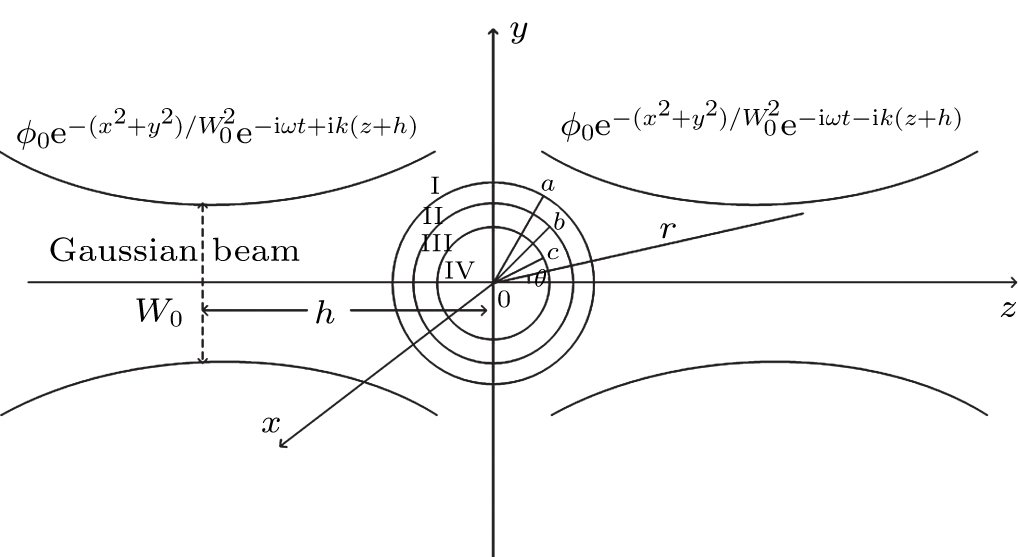
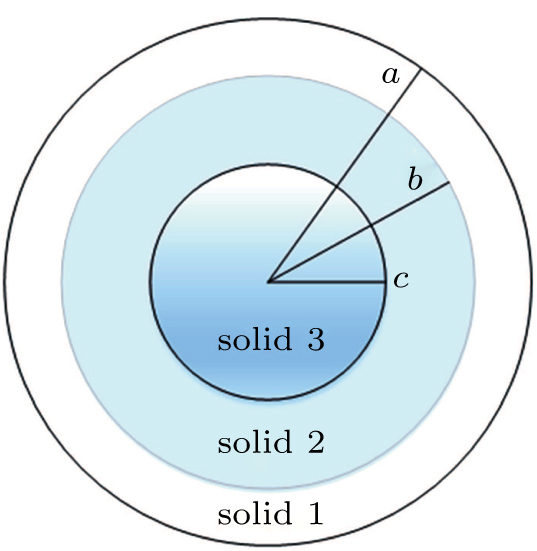
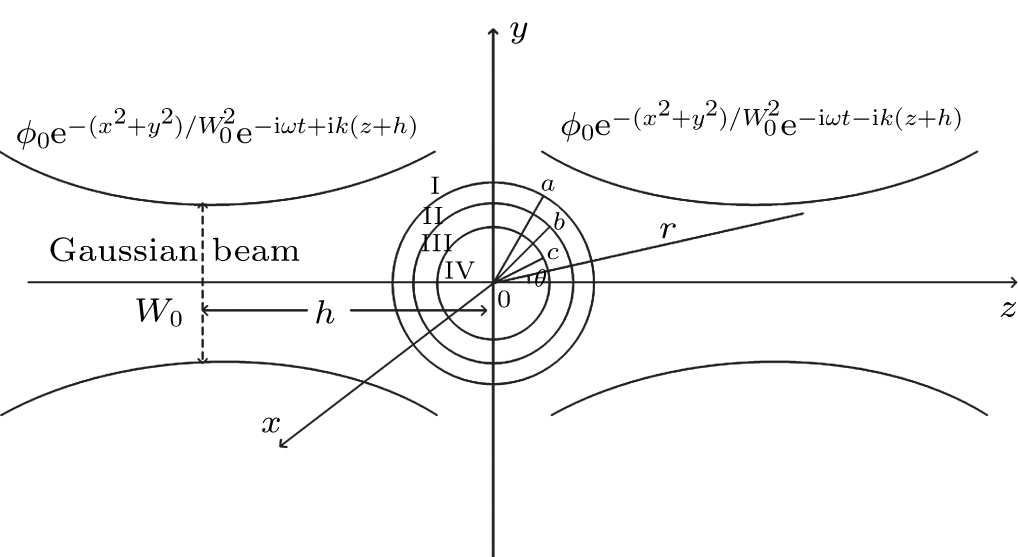
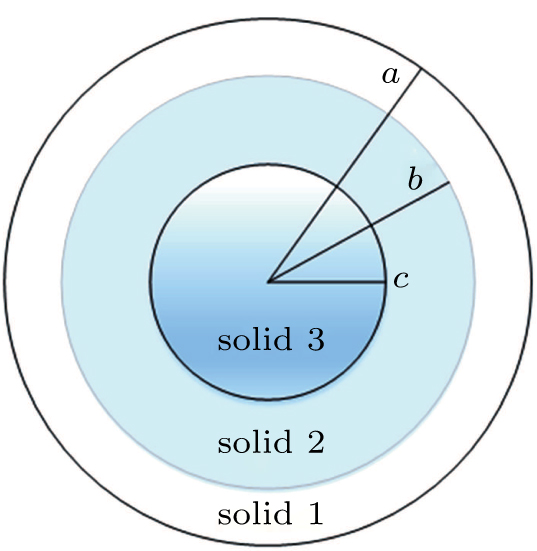
Let a Gaussian standing wave be incident upon a three-layered sphere immersed in an inviscid fluid medium, with the wave propagating along the + z direction. The origin of coordinates of the spherical coordinate system is shown in Fig. 1. The center position of the sphere is the origin of coordinates, which is at distance h from each beam waist of a Gaussian standing wave field, where a, b, and c are the outer, mid, and inner radii of a spherically symmetric three-layered sphere.
Fig. 1. Coordinate geometry of the Gaussian standing wave and a three-layered sphere model.
For simplicity, it is assumed that the Gaussian beam is weakly focused. Moreover, the phase front of propagation of the Gaussian beam is almost equal to the plane wave near the beam waist. This means that it can be approximately regarded as an acoustic wave with Gaussian amplitude distribution in that region. Assume also a homogeneous and isotropic fluid of infinite extent with adiabatic speed of sound c1 and density . The velocity potential of the incident sound wave can be written as [11]
where is the amplitude of the incident velocity potential, W0 is the width of the Gaussian beam, k is the wavenumber, and ω is the angular frequency of the wave.
Let , , , , .
In a spherical coordinate system, the velocity potential of an incident wave can be expressed in terms of a general eigenfunction expansion of the form[8,18]
where
is a spherical Bessel function of order n, is a Legendre function of order n, and is the gamma function. From Eqs. (4) and (5), the beam coefficients Qn can be determined by the dimensionless parameter . The convergent items are different for different ratios of W0 to λ.
To validate the finite series method, the incident Gaussian beam has been calculated by exact solution as well as a finite series solution for different beam widths.[4] The results show that when , the wave beam computed by a finite series is in agreement with the exact solution.[8]
2.2. Scattering of a Gaussian standing wave by three-layered spherical particles
The Gaussian standing wave with wavelength in an infinite medium is scattered by the sphere. Assume that the incident wave is axisymmetric, and the outer fluid water has density and sound speed c1. In spherical coordinates, the velocity potential of the incident wave can be expressed in terms of a general eigenfunction expansion of the form shown in Eq. (2).
The scattered velocity potential can be expressed as
where is the Hankel function of the first kind, and An is the unknown scattering coefficient, which is to be determined by the boundary conditions. Therefore, the total scalar velocity potential outside the sphere can be written as
The particle vector displacement Ui (i = 2, 3, 4) in the shell of the elastic material is assumed to be[2,3]
where the scalar potential and the vector potential can be expanded in series by using the unknown coefficients Bn, Cn, Dn, En, Fn, Gn, Hn, In, Kn, Ln, respectively, as follows:
where is a spherical Bessel function of the second kind, and and are the wave numbers of the longitudinal and shear waves, respectively. In the shell material (medium 2, 3, 4), Bn, Cn, Dn, En, Fn, Gn, Hn, In, Kn, Ln are the unknown coefficients determined by the boundary conditions.
The boundary conditions lead to 11 linear equations. After laborious but straightforward calculations, the scattering coefficient An is determined in the following form:where bi and qij are the dimensionless elements of the determinants given in Appendix A.
2.3. Acoustic radiation force on a layered spherical shell
The acoustic radiation force on a boundary moving with a velocity of the first order was calculated by Yosioka and Kawasima[28] as
where S is the boundary at its equilibrium position, and are the normal and tangential components of the particle velocity of the boundary, respectively, and the symbol denotes time averaging.
After calculation, can be expressed as
and
where YP is a dimensionless factor called the radiation force function, * denotes the complex conjugate, and and are the real and imaginary parts of the scattering coefficients An defined by Eq. (15).
3. Numerical calculation of YP and analysis
The acoustic radiation force function YP given by Eq. (18) is evaluated for multilayered spheres, of which the physical constants are assumed as listed in table 1. In this paper, we mainly discuss the two-layered and three-layered microsphere model shown in Figs. 2 and 3, respectively. Two 30-MHz Gaussian ultrasonic transducers are used for simulation, which means the wavelength of ultrasound in water is . For the acoustic scattering approach to be valid, the wavelength of ultrasound should be greater than or approximately equal to the size of an object; thus, the radius of sphere in the simulation is smaller than . The detailed analyses regarding acoustic radiation force acting on the microspheres are presented as follows.
The physical constants of materials used in the sample calculations.[11,29,30]
.
Materials
Mass density
Compressional
Shear
Normalized longitudinal
Normalized shear
/
velocity/
velocity/
absorption
absorption
Water
1.00
1500
…
…
…
Animal oil
0.80
1400
…
…
…
Stainless steel
7.90
5240
2978
…
…
Polyethylene
0.957
2430
950
0.0073
0.022
Polymethyl methacrylate
1.19
2690
1340
0.0035
0.0053
Table 1.
The physical constants of materials used in the sample calculations.[11,29,30]
.
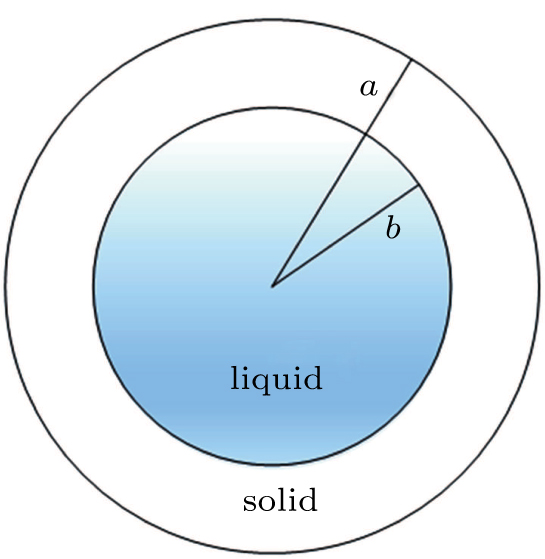
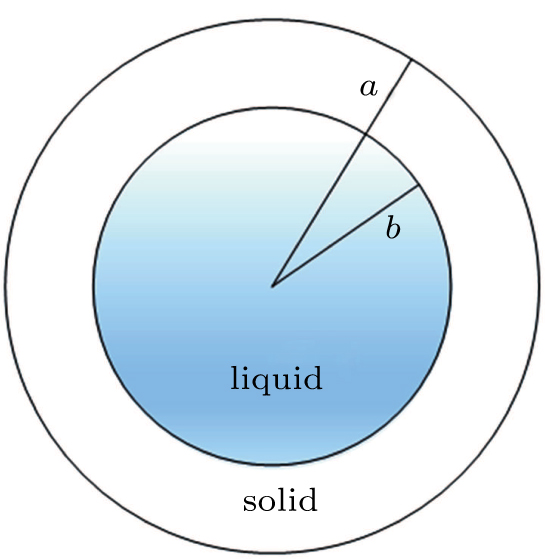
3.1. Two-layered polymer-coated liquid sphere model
The acoustic radiation force acting on a fluid drug coated by a spherical polymer-type layer can be used for drug delivery applications in which the shell is accurately broken and the drug is used in the affected areas. The plots of axial radiation forces in a two-layered model (, c = 0) of low density polymethyl methacrylate (PMMA) shell filled with water and animal oil are shown in Figs. 4–8.
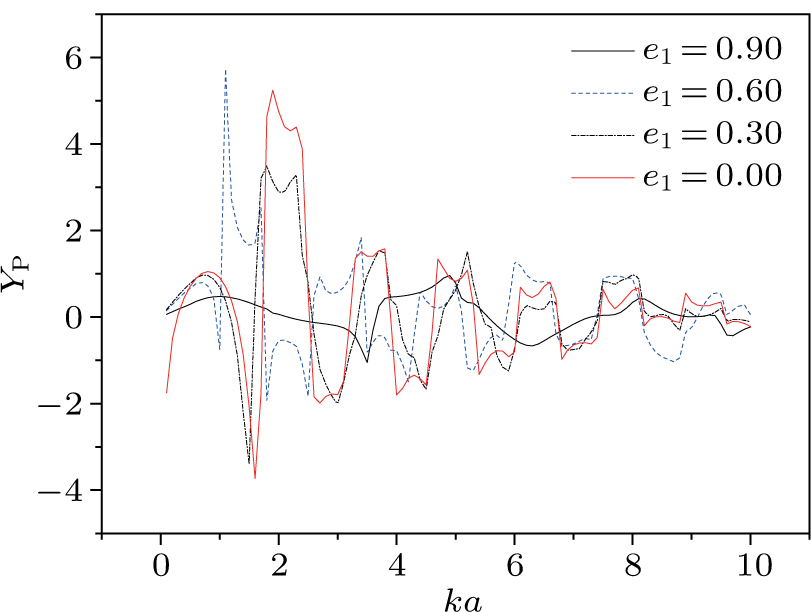
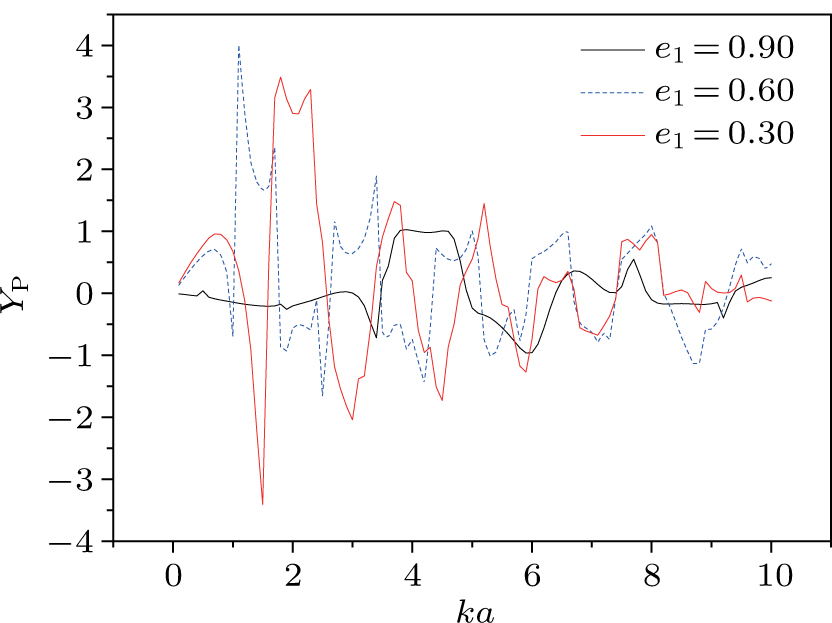
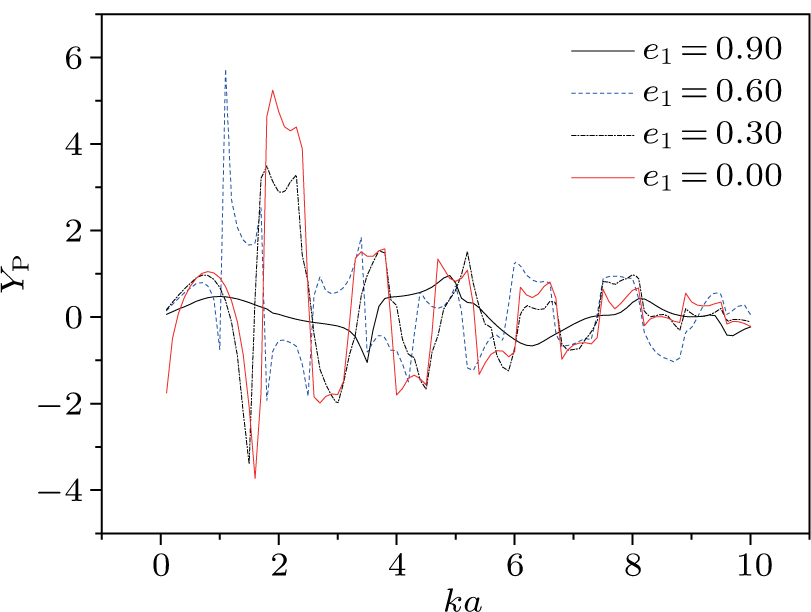
Fig. 4. (color online) Acoustic radiation force function vs. ka for the two-layered sphere filled with water with different e1.
Figure 4 shows the radiation force function YP vs. ka for a PMMA sphere shell filled with water in a Gaussian standing wave at with different e1 () values. The simulation results indicate that the curves have a series of prominent peaks and dips, which are caused by the effects of resonant vibration of the PMMA sphere shell. The magnitudes of the resonant peaks and dips decrease with an increase of ka value. Moreover, the peaks and dips change with different value of e1, which illustrates the thickness of inner and outer layers of the sphere affecting the resonance frequencies of the model.
In addition, with a large difference on acoustic impedance between the PMMA shell and the surrounding medium (water), the particle suffers larger radiation force when (the sphere becomes a single-layered PMMA sphere, and the numerical result is in agreement with the results of Wu[6]). With an increase of the inner radius, the negative acoustic radiation force becomes smaller and smaller, and then disappears, and the radiation force decreases and approaches zero in the situation of a thin shell with a further increase of the inner radius.
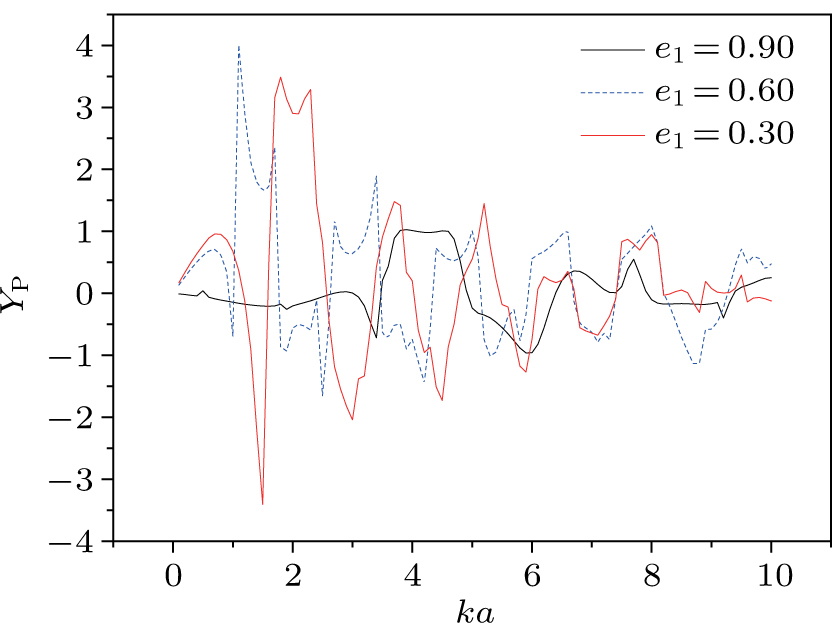
Figure 5 shows the radiation force function YP vs. ka for a PMMA sphere shell filled with animal oil in a Gaussian standing wave at with , , and , respectively. The YP-ka curves also have a series of prominent peaks and dips for cases of shell structure where . Moreover, from comparative analysis, a difference between Figs. 4 and 5 can be easily found because of the difference in the physical properties of the two inner materials.
Fig. 5. (color online) Acoustic radiation force function vs. ka for the two-layered sphere filled with animal oil with different e1.
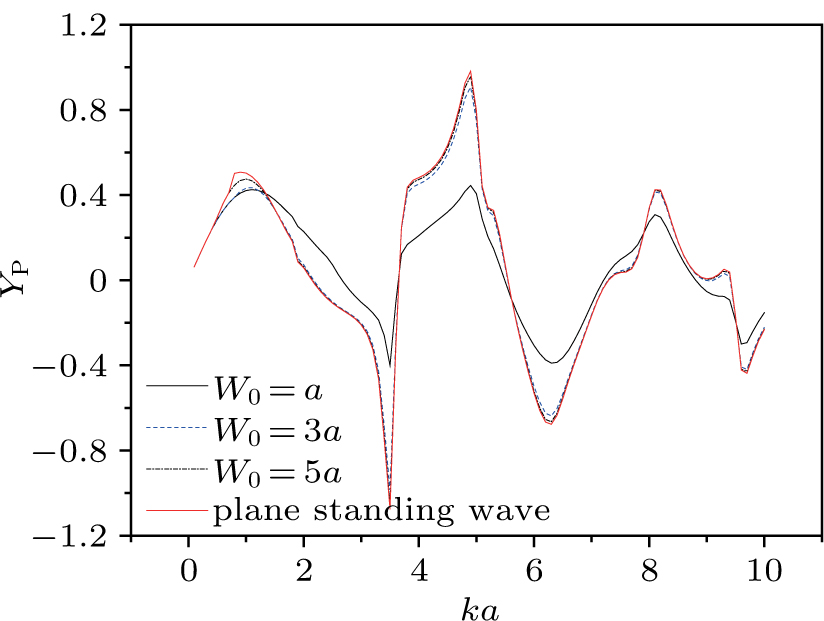
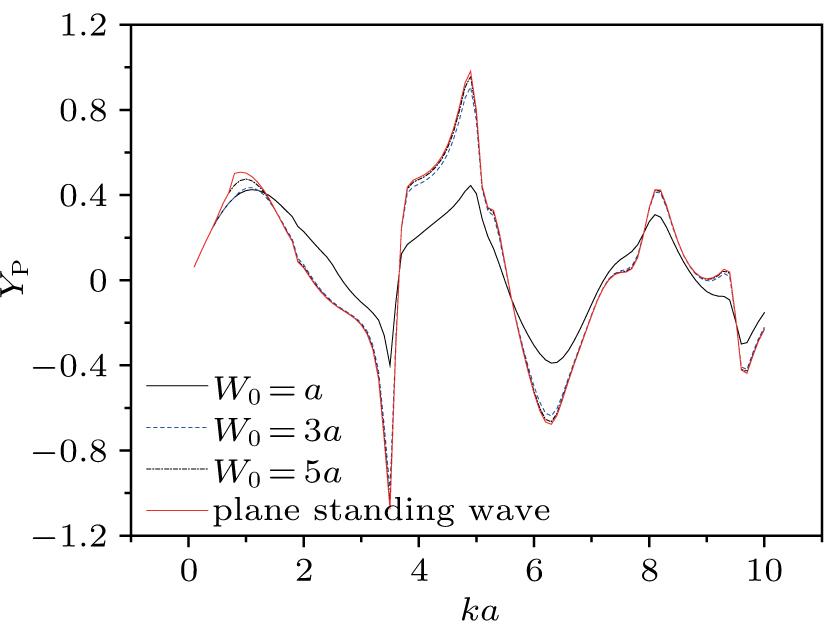
Figures 6 and 7 show the radiation force function for different beam widths of the Gaussian standing wave at . The width of the Gaussian standing wave influences the radiation force function. The magnitudes of the peaks and the dips increase along with the increasing W0. When the beam waist is far greater than the radius of the sphere (), the radiation force function of the Gaussian standing beam approaches that of a plane standing wave. Similar results have been presented in the literature, where the acoustic radiation force of the Gaussian beam approaches that of a plane wave at for a single sphere.[9]
Fig. 7. (color online) Acoustic radiation force function vs. ka for the two-layered sphere filled with animal oil with different W0.
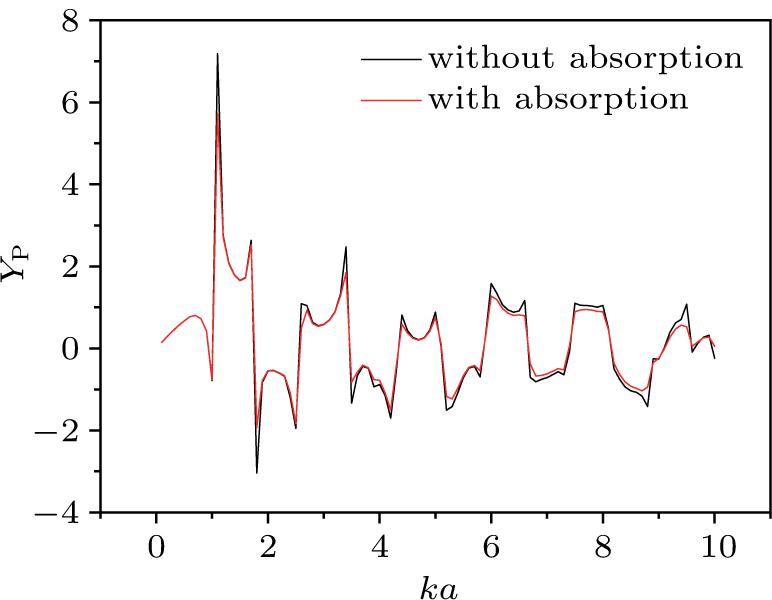
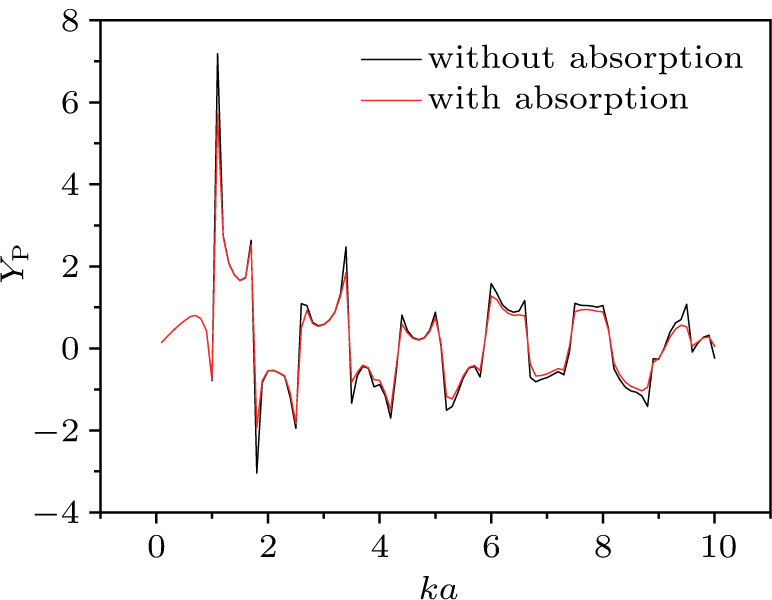
Figure 8 shows the radiation force function for the two-layered sphere, considering the sound absorption of the polymeric material. As shown in the figure, YP decreases with the magnitudes of the peaks and dips in each curve. Therefore, the absorption of sound is an important factor for the acoustic radiation force.
Fig. 8. (color online) Acoustic radiation force function vs. ka for a two-layered sphere filled with water, considering the sound absorption of the polymeric material.
3.2. Three-layered solid sphere model
Relative to the single-layered and two-layered spherical structures, many biological tissues have a three-layered spherical structure. Hence, the study of acoustic radiation force on three-layered spherical shell structures has more practical value for applications. Figures 9–11 show the simulation results for a three-layered solid sphere model, where PMMA, polyethylene, and stainless steel are chosen as the materials for the three-layered structure in the simulation.
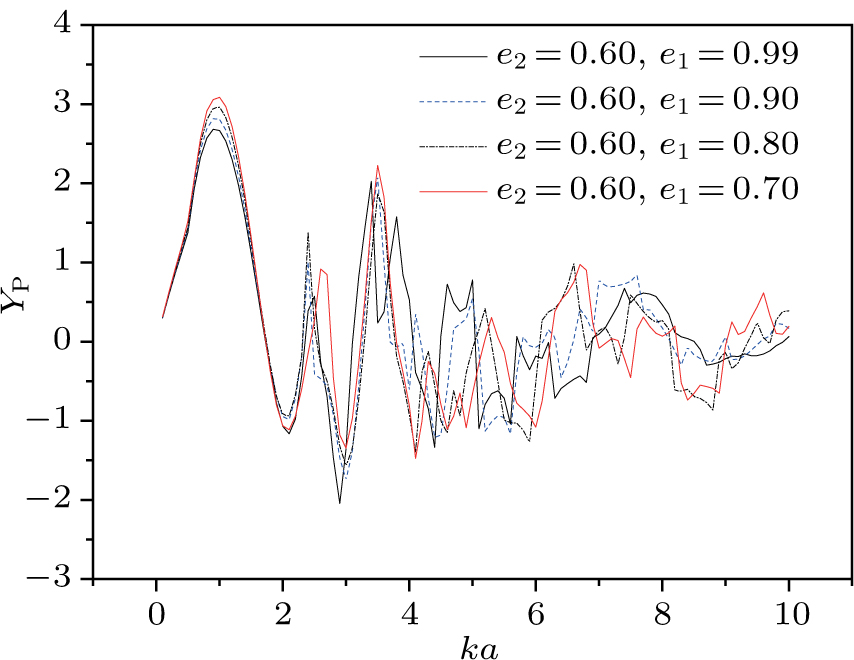
Fig. 9. (color online) Acoustic radiation force function vs. ka for a three-layered sphere with different e1.
In Fig. 9, the YP–ka curves are computed in the Gaussian standing wave at , and , for different values for e1. It is found that the acoustic radiation force fluctuates significantly and decreases with an increase of ka. However, the YP-ka curves have no significant change with the thickness of the materials for the outermost and middle layers, which can be explained by noting that PMMA and polyethylene have similar physical properties.
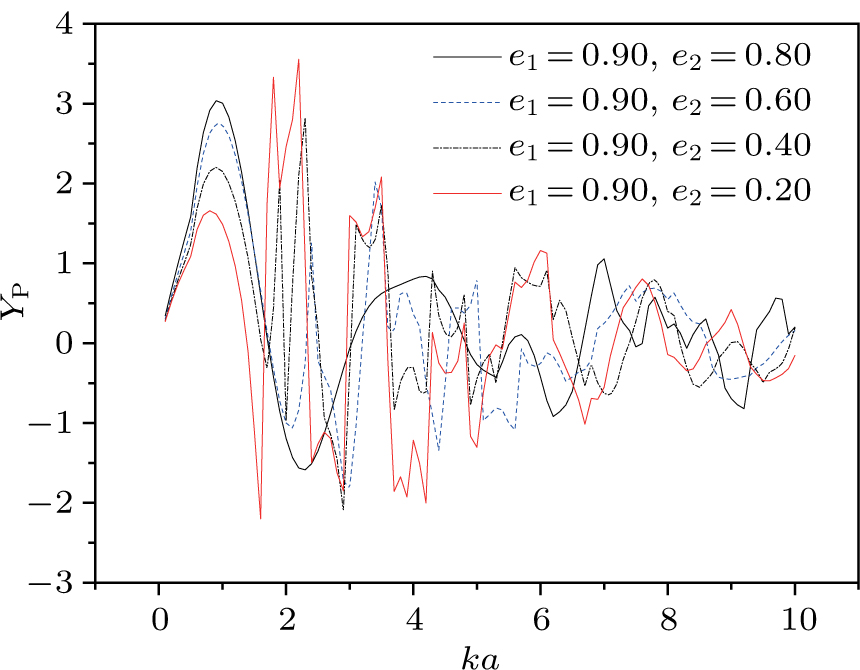
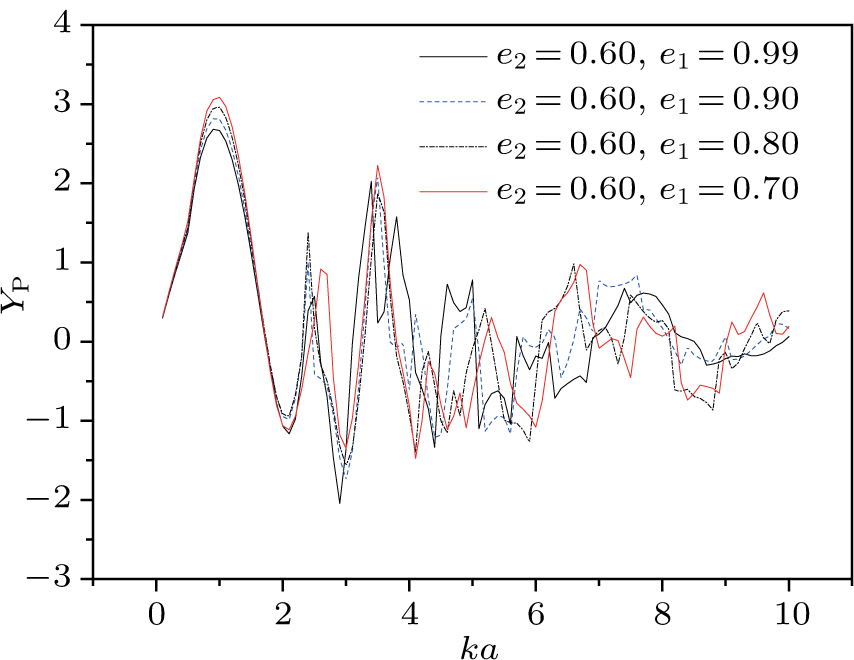
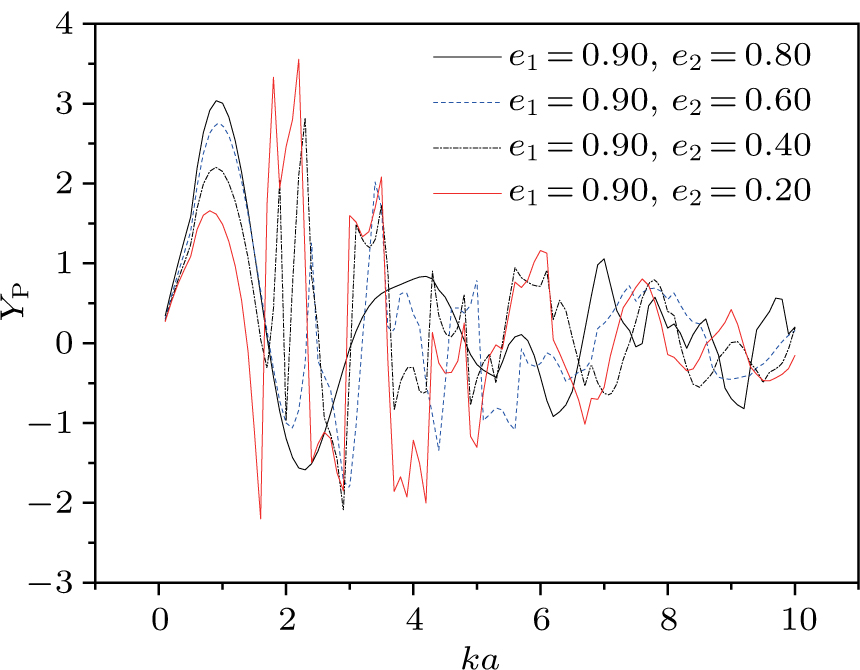
Figure 10 shows the radiation force function YP in the Gaussian standing wave at , and , for different values of e2. From the simulation results, the acoustic radiation force function has a series of prominent peaks and dips. In addition, the numerical values depend on the value of e2. From the above analyses, it can be concluded that the values of e2 (the thickness of each layer) have an effect on the radiation force function. When the acoustic impedance of two adjacent materials is very different, the values of e2 can have a huge effect on the acoustic radiation force.
Fig. 10. (color online) Acoustic radiation force function vs. ka for the three-layered sphere with different e2.
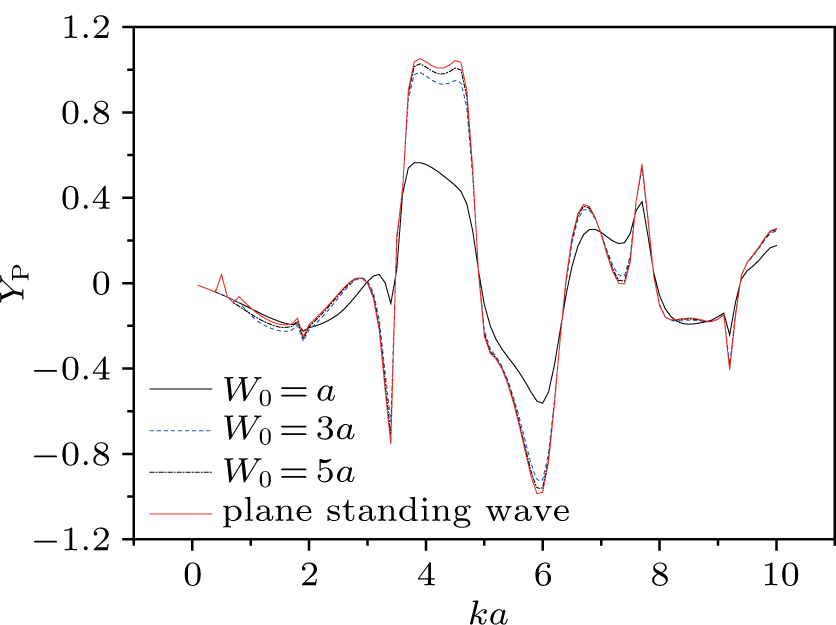
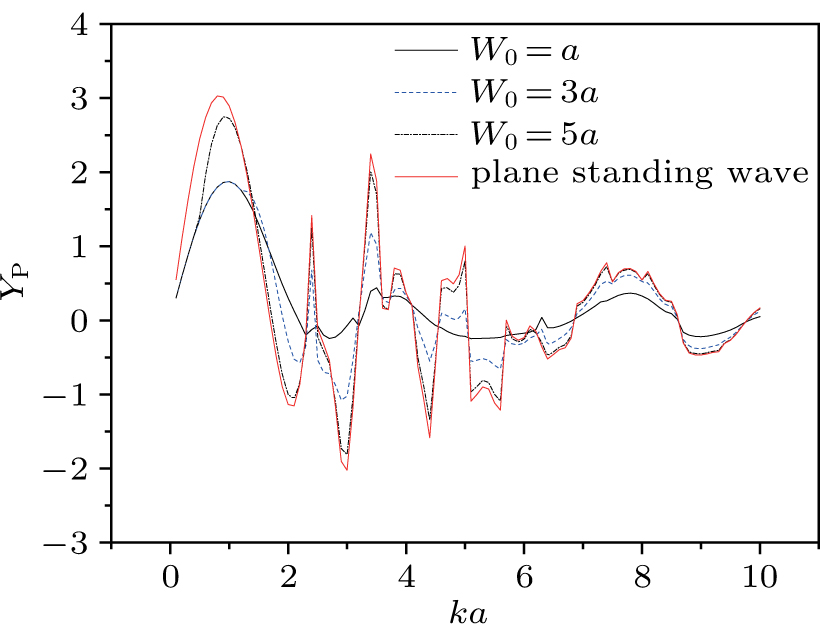
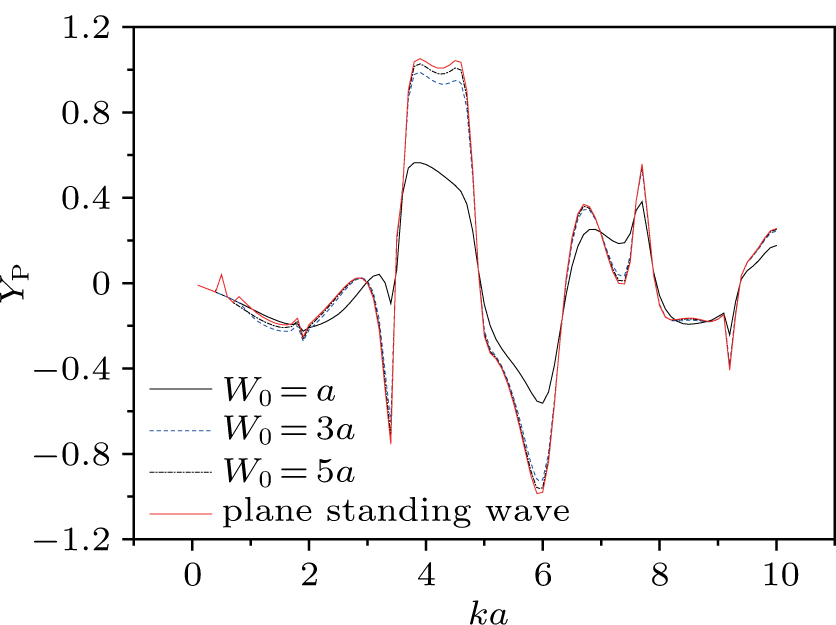
Figure 11 shows that the radiation force changes with the width of the Gaussian standing wave at , . Similar with Figs. 6 and 7, the width of the Gaussian standing wave influences the radiation force function. The magnitudes of the peaks and the dips increase with the increasing W0. When the beam waist is far greater than the radius of the sphere, the radiation force function of the Gaussian standing beam approaches that of a plane standing wave.
Fig. 11. (color online) Acoustic radiation force function vs. ka for the three-layered sphere with different W0.
4. Conclusions
Based on the finite series method, the Gaussian standing wave using spherical harmonic functions and the beam coefficients of the Gaussian beam are observed. The acoustic radiation force function can be obtained for a multilayered spherical particle in fluid using the Gaussian standing wave acoustic field. The numerical analyses for two- and three-layered spherical shells are performed with a particular emphasis on the effects of the ratio of outer radius to inner radius of the shell on the acoustic radiation force. We also discuss the influence of the width of the Gaussian wave on the radiation force function. The results show that the acoustic radiation force is negative at some ka values, generating a potential well. This suggests the possibility of using Gaussian standing waves to manipulate multilayered spheres with known mechanical and acoustical properties, providing an impetus for further research on cell biomechanics and drug delivery. However, if further progress can be made in the structure of a cell and drug carrier microsphere, such as the acoustical properties of cell components, more valuable and meaningful results can be obtained based on the theory presented in this paper.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}