{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Three-dimensional parabolic equation model for seismo-acoustic propagation: Theoretical development and preliminary numerical implementation
Cite this Article
Tang Jun, Piao Sheng-Chun, Zhang Hai-Gang. Three-dimensional parabolic equation model for seismo-acoustic propagation: Theoretical development and preliminary numerical implementation
. Chinese Physics B, 2017, 26(11): 114301 
Permissions
Three-dimensional parabolic equation model for seismo-acoustic propagation: Theoretical development and preliminary numerical implementation
† Corresponding author. E-mail:
Project supported by the National Nature Science Foundation of China (Grant Nos. 11234002 and 11704337) and the National Key esearch Program of China (Grant No. 2016YFC1400100).
Abstract
A three-dimensional (3D) parabolic equation (PE) model for sound propagation in a seismo-acoustic waveguide is developed in Cartesian coordinates, with x, y, and z representing the marching direction, the longitudinal direction, and the depth direction, respectively. Two sets of 3D PEs for horizontally homogenous media are derived by rewriting the 3D elastic motion equations and simultaneously choosing proper dependent variables. The numerical scheme is for now restricted to the y-independent bathymetry. Accuracy of the numerical scheme is validated, and its azimuthal limitation is analyzed. In addition, effects of horizontal refraction in a wedge-shaped waveguide and another waveguide with a polyline bottom are illustrated. Great efforts should be made in future to provide this model with the ability to handle arbitrarily irregular fluid–elastic interfaces.
1. Introduction
The modelling of sound propagation is of great importance in underwater acoustics. Elasticity in the ocean bottom can induce remarkable effects on sound propagation in the oceanic water column.[1,2] Meanwhile, in many cases the effects of horizontal refraction are non-negligible, and thus three-dimensional (3D) propagation should be considered.[1,3] In predicting sound fields in shallow water, where the terrain is probably very complicated and sound waves interact frequently with the bottom, it is necessary to consider both bottom elasticity and 3D propagation. Significant efforts have been made to model the two-dimensional (2D) sound propagation in oceans overlying elastic bottom (referred to as seismo-acoustic waveguides) based on the parabolic equation (PE) method. Readers are referred to a review article by Xu et al. for a summary of the relevant studies.[4] Also, there have been a variety of 3D models, including but not limited to 3D PEs,[4–13] 3D coupled-mode methods,[14–16] hybrid methods,[17–20] and analytical methods.[21–26] Nevertheless, studies that incorporate both bottom elasticity and 3D propagation are very scarce. The state-of-the-art PE model for this purpose is the 3D seismo-acoustic PE formulated in Refs. [8]–[12] and numerically implemented in Ref. [13] (referred to as Lee’s model). However, in its present form this model is not capable of incorporating horizontal refraction caused by asymmetric bathymetry (bathymetric refraction), because cylindrically symmetric bathymetry is assumed in its numerical algorithm.[12,13] The source images method[24–26] is also suited for this purpose, but is only applicable in the case of wedge-shaped environments. Another noticeable work is the elastic mode PE in the case of low shear modulus, which employs the parabolic approximation in the horizontal plane and the mode representation in the vertical direction.[20] In an attempt to enrich the studies of the above issue, here we present a new model for 3D seismo-acoustic wave propagation problems. Following Lee et al.,[8–13] we establish our model on the basis of PE. The differences between our model and Lee’s model, which are also arguably advantages of our model, are mainly in three aspects as follows.
First, our model is established in a Cartesian coordinate system, while Lee’s model is in a cylindrical coordinate system. An advantage of Cartesian coordinate system is that, in contrast to cylindrical coordinate system, it is more natural to incorporate axial asymmetry. In addition, Cartesian coordinate system does not suffer the problem of growth in computational grid size.
Second, the approaches to factorizing the full wave equations into one-way equations (or PEs) are different. Needless to say, the starting point of any PE method is to obtain one-way equations. For purely acoustic problems, one can directly factorize the Helmholtz equation into a one-way equation; whereas, for seismo-acoustic problems, the factorization of the elastic motion equations is tricky because of the existence of the first-order range derivatives of particle displacements.[27] Thus, extra effort should be made to rewrite the elastic motion equations into a readily factorable form. In Lee’s model, the elastic motion equations are decomposed into one P-wave equation and three S-wave equations, which can be easily factorized after applying the far-field approximation. An alternative approach is to perform linear operations on the elastic motion equations and meanwhile choose proper dependent variables.[27–29] A comparison between derivations in Refs. [12] and [27] reveals that the latter approach brings about much simpler expressions for the interface conditions. In this paper, two sets of 3D PEs are derived by using the latter approach, which is shown in Section
The third difference lies in the ability to incorporate bathymetric refraction. For the sake of simplicity, the numerical scheme in this paper solely focuses on y-independent cases. Although the variations along the y direction are ignored, irregularity of the seafloor along the x direction is still able to induce bathymetric refraction. Whereas, in Refs. [12] and [13], the bathymetry is assumed to be cylindrically symmetric, and thus the bathymetric refraction is eliminated.
The rest of this paper is organized as follows. The 3D PEs are derived in Section
2 Motion equations
According to Newton’s second law, the motion equations for an elastic medium in the absence of external forces are
Substituting Eqs. (
It is clear that in equations (
2.1 Dependent variables (Δ, v, w)
The dependent-variable formulation which was first adopted in 2D elastic PE[28] is (Δ, w). Guided by this, a corresponding dependent-variable formulation for 3D elastic PE is developed here, namely, (Δ, v, w).
Differentiating Eqs. (
Rewriting Eqs. (
Although the above derivations are for an elastic medium, equations (
2.2 Dependent variables (Λ, vy, w)
A second dependent-variable formulation that is suitable for the PE method is (Λ, vy, w), where Λ = ux + vy, ux is the x derivative of u, and vy is the y derivative of v.
Differentiating Eqs. (
In the fluid layer, we still use the (Δ, v, w) formulation since Δ can be related to sound pressure p by Δ = −λp.
3. Interface conditions
Using the stair-step approximation in the x direction, the waveguide is divided into a series of x-independent regions. For the sake of simplicity, we assume the geometry in each region to be y-independent as well. In this way, there are only horizontal interfaces in each region, while between adjacent regions only vertical interfaces.
The ocean surface is assumed to be soft boundary, i.e., p|z = 0 = 0.
The horizontal fluid–solid interface conditions are continuity of vertical displacement, continuity of normal stress, and vanishing of tangential stress, which can be written as follows:
Considering Eq. (
Similarly, for the (Λ, vy, w) formulation, the interface conditions in Eqs. (
Conditions for vertical interfaces between adjacent regions can never be strictly satisfied in a PE algorithm.[30–33] The conventional way to handle the vertical interfaces in PE is to fix the fields with an approximated method when marching them across the vertical interfaces. The approximated methods to do this includes coordinate rotation,[30] coordinate mapping,[31] energy conservation,[32] and single scattering.[33]
4. Outline of numerical scheme: PE combined with Fourier synthesis
Since the inhomogeneity of the medium parameters in the horizontal plane has been ignored in Section
Performing the Fourier transform on Eq. (

Note that discretizing Eq. (
All the above steps are for marching 

For the model as a whole, it is necessary to provide the starting fields for each 2D component, i.e., 
Finally, the 3D solution can be obtained by performing the inverse Fourier transform on 
5. Numerical results
5.1 Range-independent case
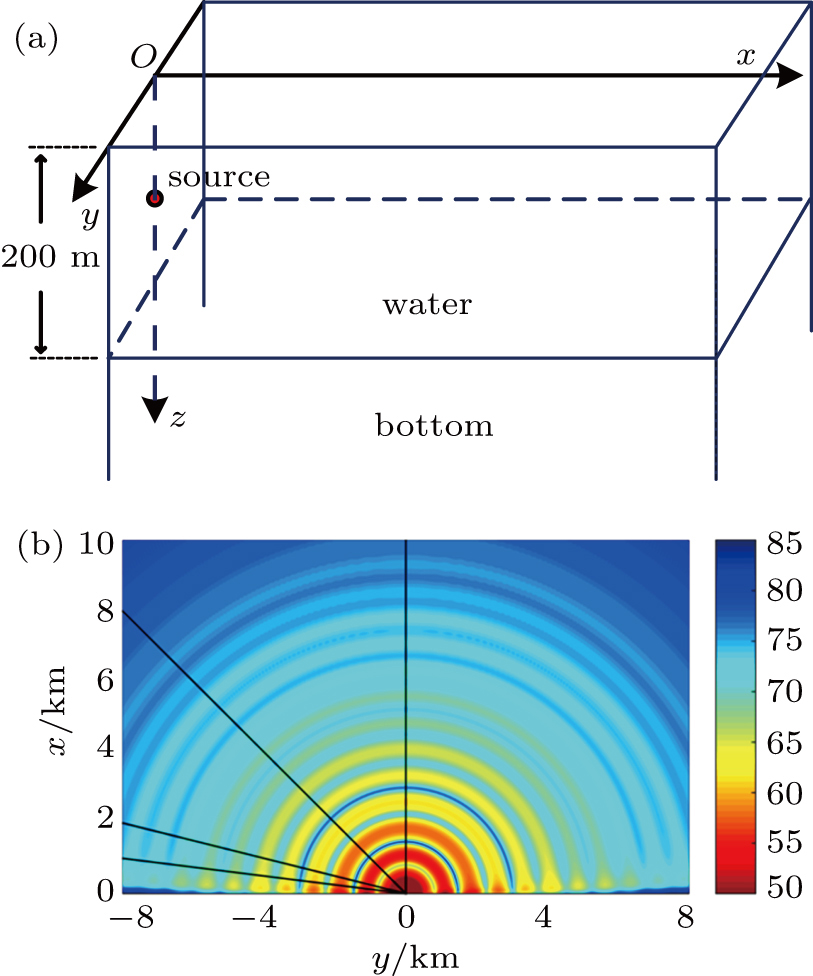
Example A is for testing the 3D PE model in a range-independent ocean acoustic environment overlying an elastic half-space. The geometry is shown in Fig.
 | Fig. 1. (a) Geometry of the waveguide in Example A. (b) TL contour of sound pressure on the horizontal plane at a depth of z = 30 m. The solid lines are along the azimuthal directions of φ = 0°, 45°, 76°, and 82.9°, respectively. |
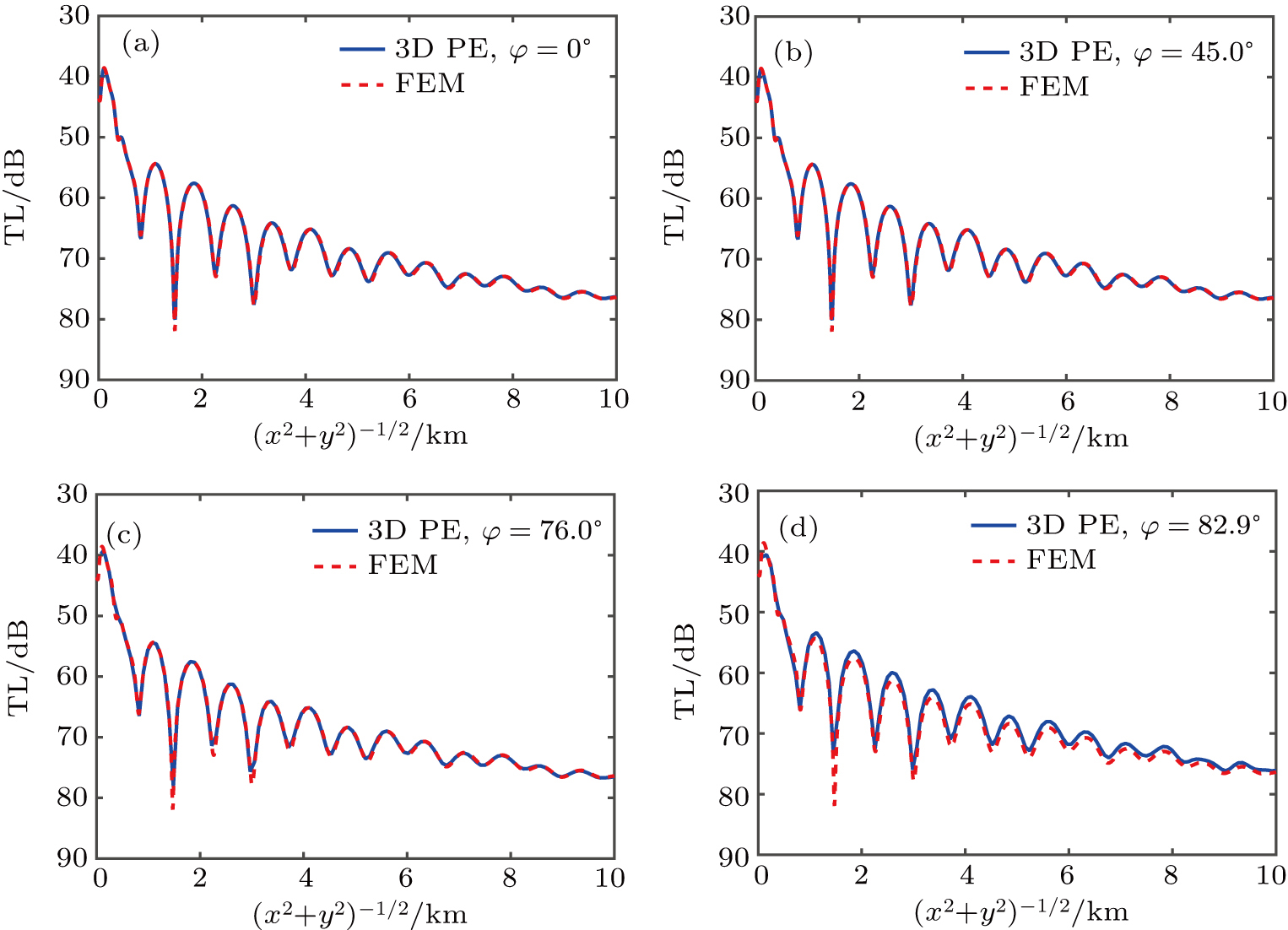
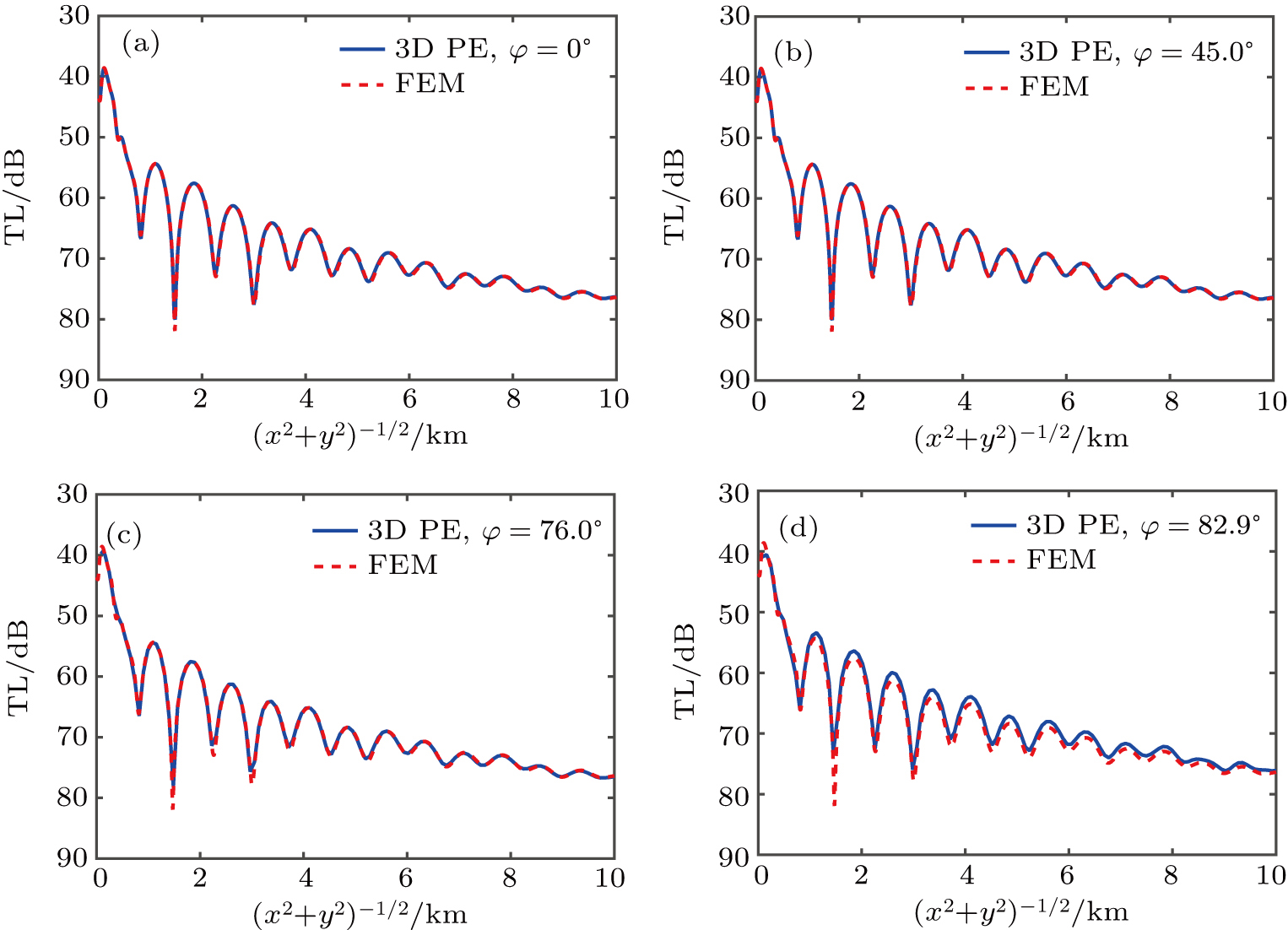 | Fig. 2. TL curves of sound pressure at a depth of 30 m and along azimuths of 0°, 45°, 76°, and 82.9° in Example A. |
5.2 Wide-angle capability
Angular limitation of the PE model arises from the use of Padé approximation, and can be estimated by evaluating the phase error of Padé approximation.
We write the solution of the Fourier-transformed dependent variables as a sum of normal modes:
From Eq. (

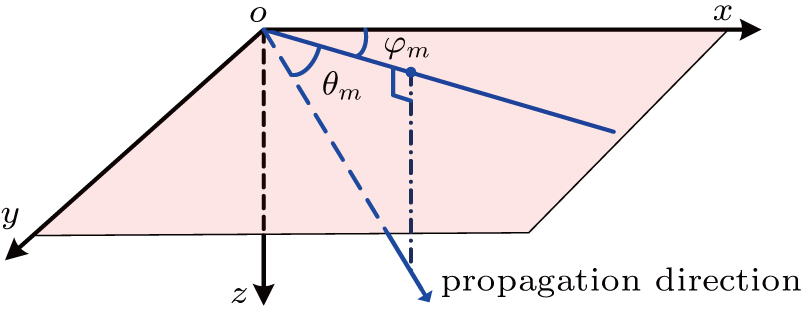
It is natural to relate the eigenvalues to propagation directions of the modes as follows:
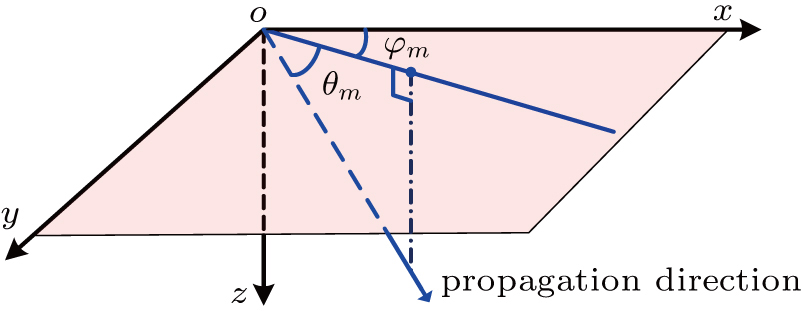 | Fig. 3. (color online) Definitions of the azimuth and pitch angles. |
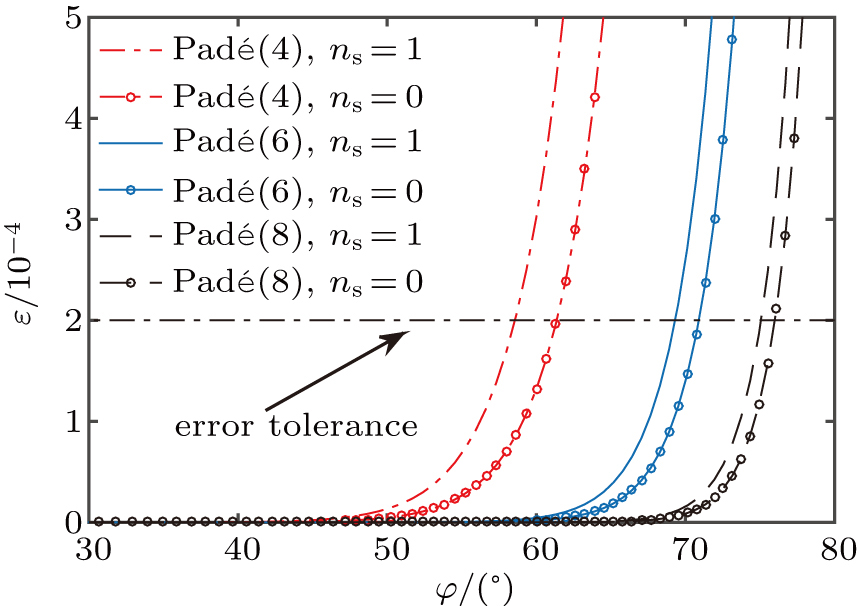
Without loss of generality, we assume θ = 0 (in the far field of shallow water, θ is approximately 0) and give the curves of ε versus φ. The results are displayed in Fig.
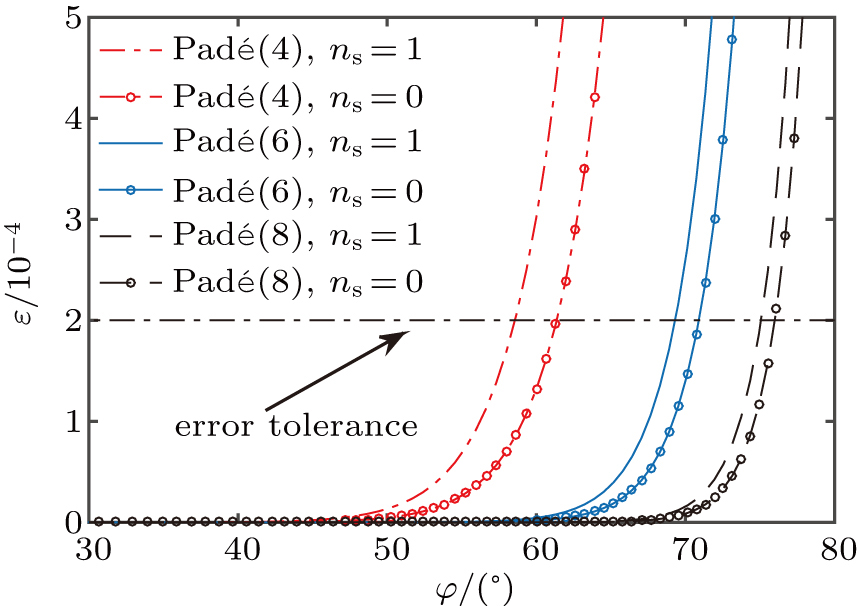 | Fig. 4. (color online) Plots of phase error ε versus azimuth φ for Padé approximations for n = 4, 6, and 8. The quantity ns denotes the number of stability constraints. Intersections between the curves and the horizontal line of ε = 0.0002, which represents the error tolerance, shows the limitation angle in each case. |
For clarity, listed in Table
Finally, it is pertinent to admit that the convergence of the procedure for calculating Padé coefficients, which is described in Refs. [34] and [37], becomes problematic as n increases.[38] This is why we do not involve the results for n > 10 in Table
| Table 1.
Limitation angles of Padé approximation with different values of n and Δx/d. . |
5.3. Range-dependent case and horizontal refraction
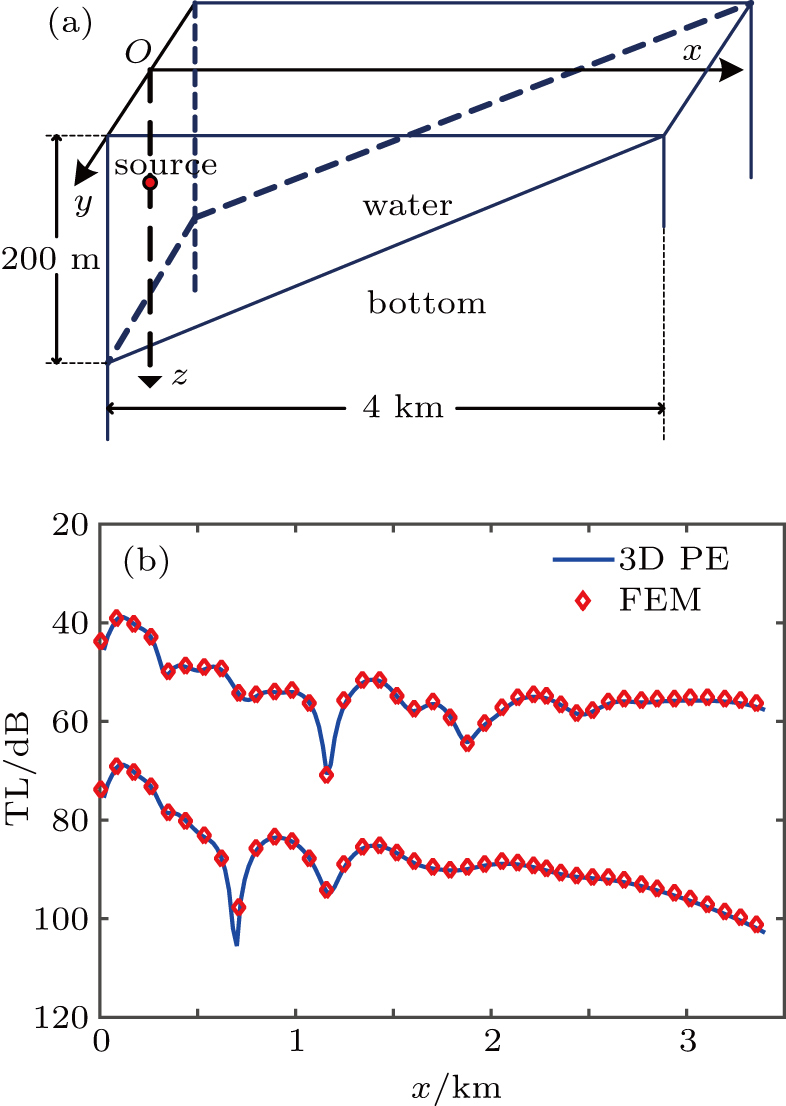
Example B is for considering the geometry as shown in Fig.
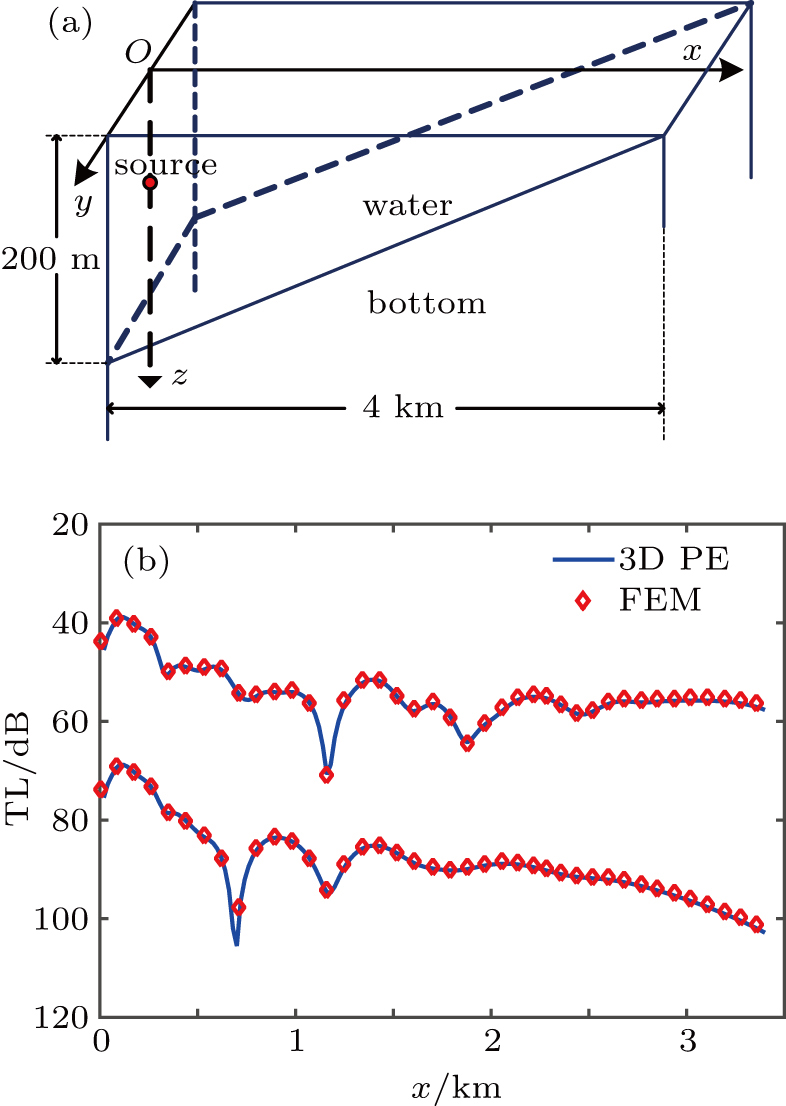 | Fig. 5. (color online) (a) Geometry of the waveguide in Example C. (b) TL curves of sound pressure at a depth of 30 m along the φ = 0° direction for Cases 1 (upper) and 2 (lower) in Example B. The lower two curves have been shifted downward by 30 dB to avoid overlapping. |
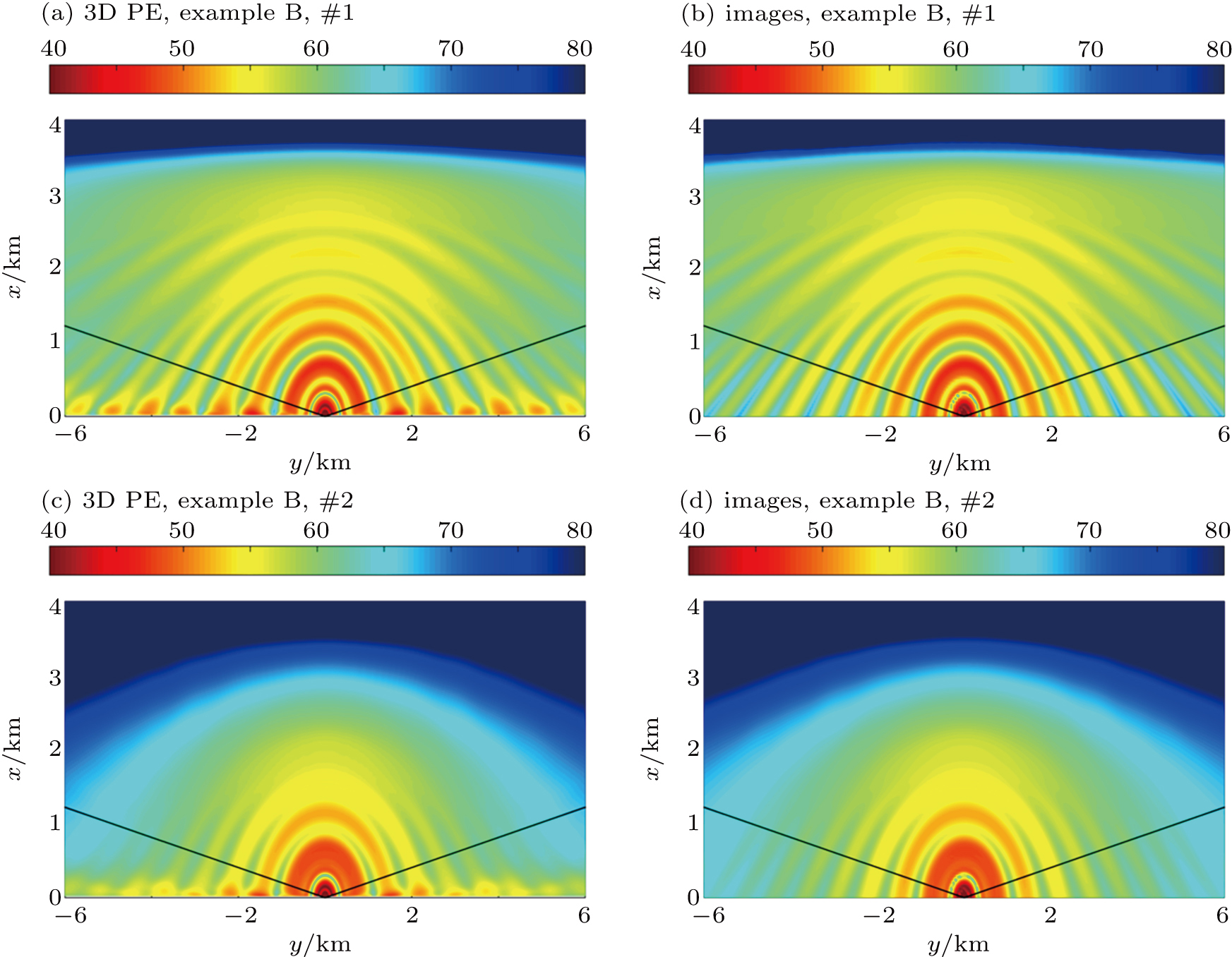
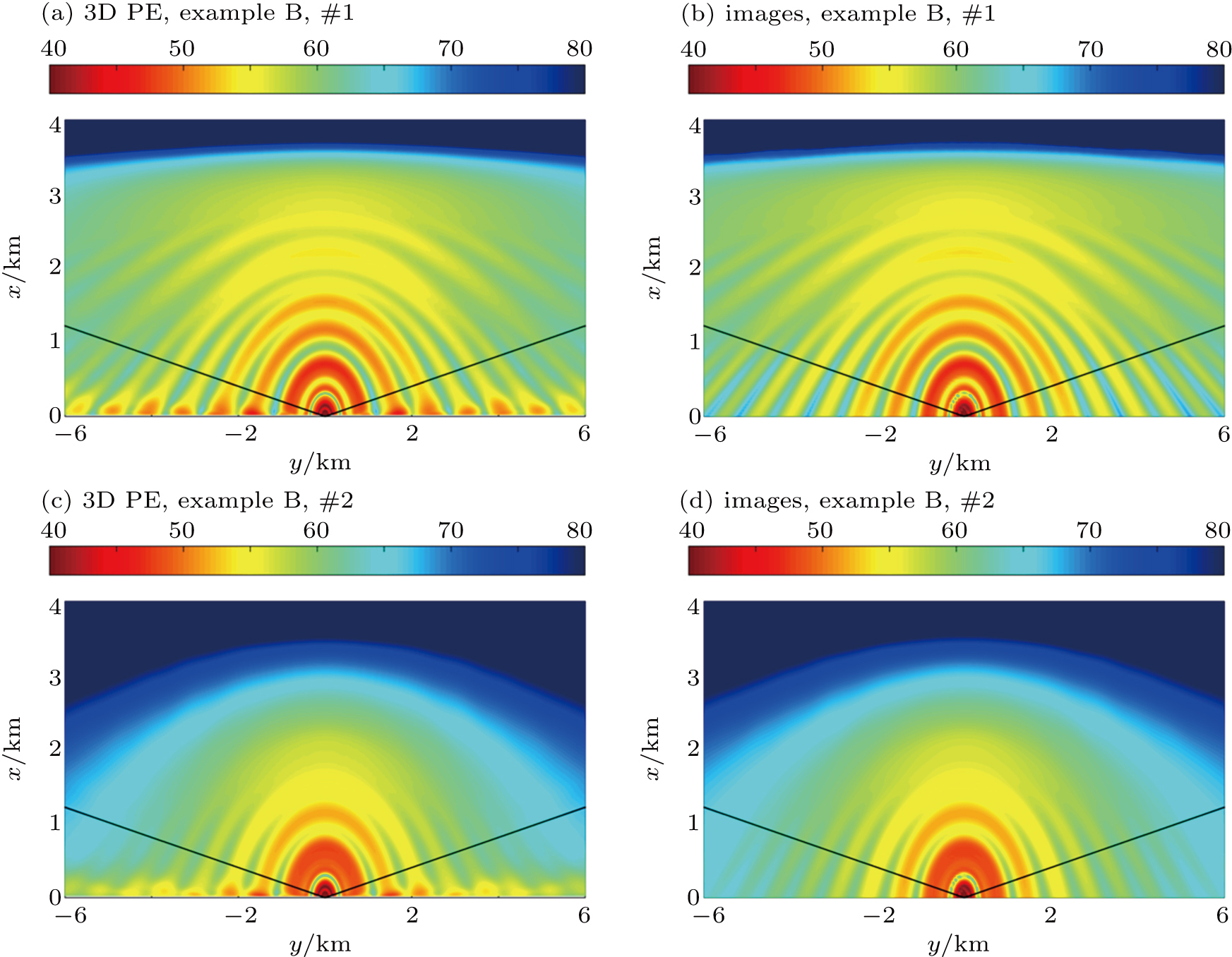 | Fig. 6. TL contours of sound pressure along the cut-plane bisecting the wedge for Cases 1 (upper) and 2 (lower) in Example B. The panels in the left column ((a), (c)) shows the results calculated using the 3D PE model, while the panels in the right column ((b), (d)) refer to the results calculated using the source images method. The solid lines denote the limitation angle of the 3D PE solutions, i.e., 78.5°. |
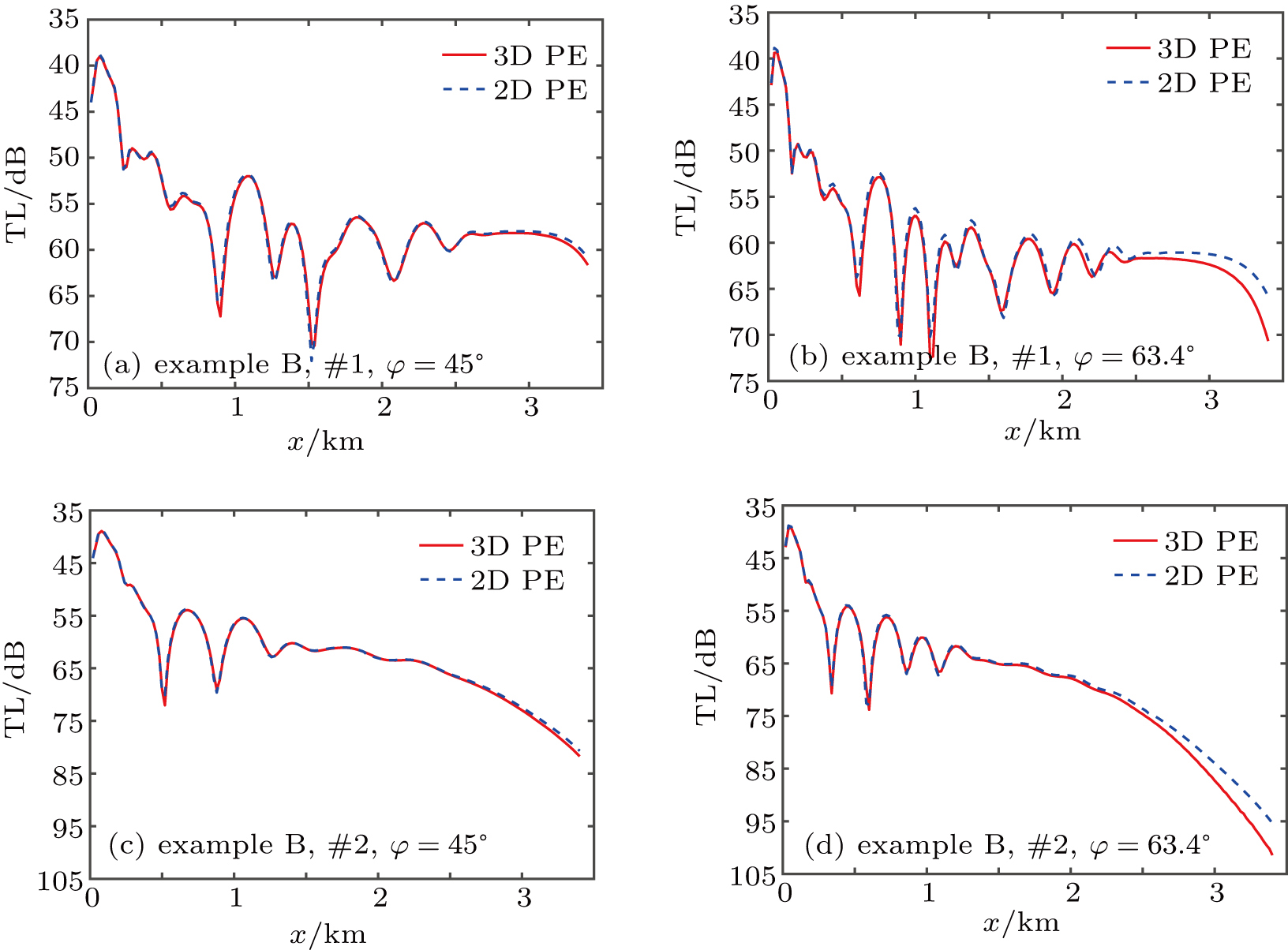
Now we analyze the effects of horizontal refraction in Example B. The TL curves at a depth of 30 m along φ = 45° and 63.4° for both Cases 1 and 2 are plotted in Fig.
 | Fig. 7. TL curves of sound pressure at a depth of 30 m along φ = 45° and 63.4° for Case 1 ((a), (b)) and Case 2 ((c), (d)) in Example B. The panels in the left column ((a), (c)) are for φ = 45°, while the panels in the right column ((b), (d)) are for φ = 63.4°. |
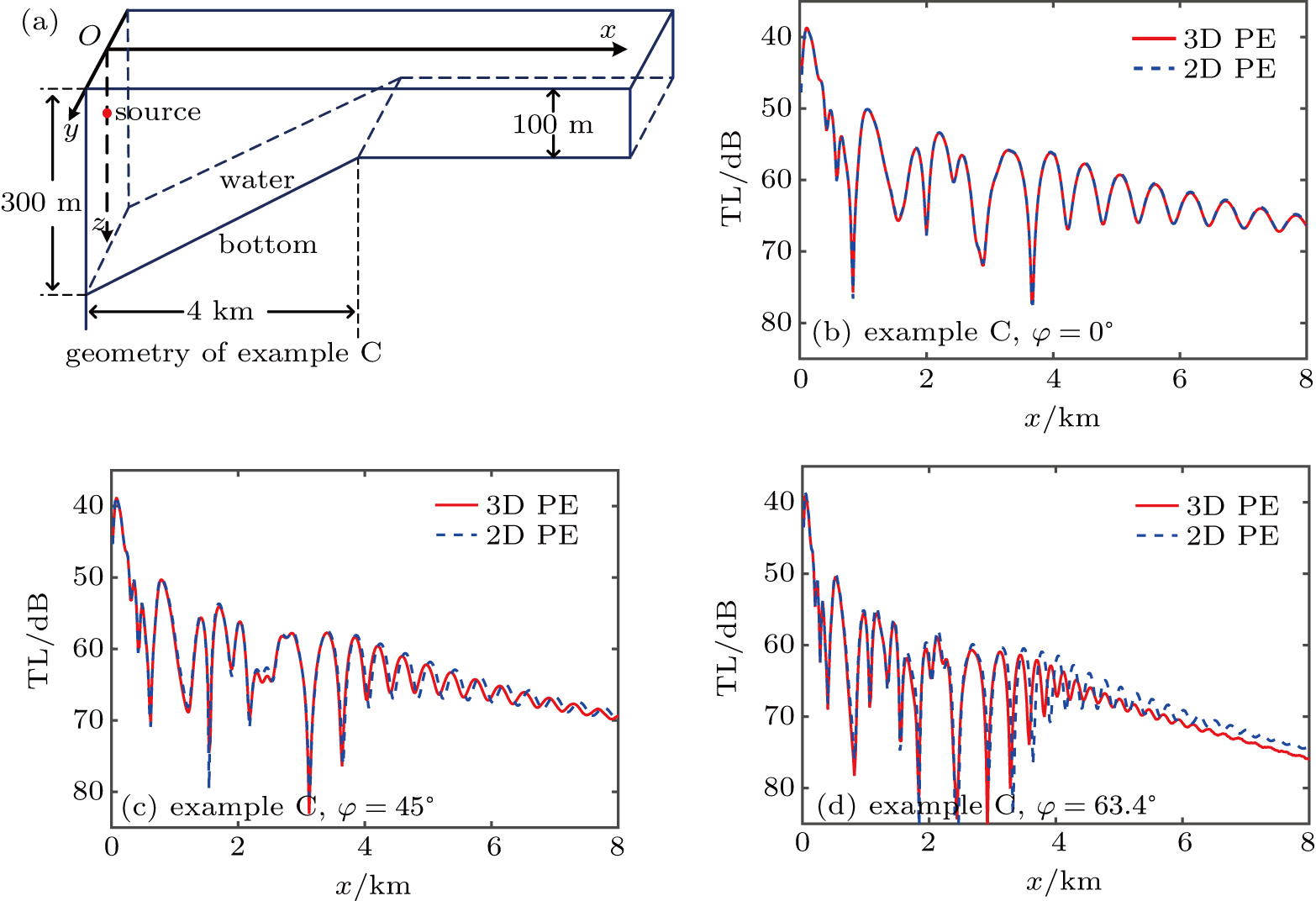
In Example C, we analyze the horizontal refraction effects in the waveguide shown in Fig.
 | Fig. 8. (color online) (a) Geometry of the waveguide in Example C. (b)–(d) TL curves of sound pressure at a depth of 30 m along φ = 0°, 45°, and 63.4° in Example C. |
Since our problem is symmetric with respect to the vertical plane of y = 0 (or φ = 0°), we have ∂p/∂y = 0 in this plane. Since ∂/∂φ = (x2 + y2)−1/2 (cos φ·∂/∂y − sin φ∂/∂x), we also have ∂p/∂φ = 0 in this plane. Then, the 3D Helmholtz equation for the water column in this plane can be reduced to a form that is identical to that for the cylindrically symmetric 2D case, and so can the boundary conditions. Therefore, the 3D solution in the plane of φ = 0° is equivalent to a corresponding 2D solution, i.e., there is no horizontal refraction in the plane of φ = 0°.
Now we continue to investigate horizontal refraction effects in other azimuths. Once again, we observe that the horizontal refraction effects in the direction of φ = 63.4° are much stronger than in the direction of φ = 45°. In addition, it can be seen that the discrepancies between the 3D and 2D solutions, basically lags of TL maxima, accumulate gradually with distance increasing in the sloping bottom area, which is also true in the previous example. The reason is that in our examples the horizontal refraction arises during reflection of sound waves at the sloping interface, and the number of reflections increases with distance increasing. Interestingly, lags of TL maxima still keep growing in the flat bottom area. This is because the rays, which have been refracted into larger azimuths in the sloping area,[16] continue to propagate to even larger azimuths after leaving the sloping area.
6. Conclusions
A 3D PE model for seismo-acoustic propagation is presented. By carefully choosing dependent variables and performing linear operations on the elastic motion equations, two sets of seismo-acoustic PEs are derived, i.e., the (Δ, v, w) formulation and the (Λ, vy, w) formulation. Numerical results demonstrate the feasibility of both of the two sets of PEs. In addition, bathymetric refraction due to the x-dependent sea bottom interface is well depicted by this model. It is illustrated that bathymetric refraction may induce remarkable effects on sound propagation in our simulation cases.
We also analyze the wide-angle capability of our model in detail. It is shown that the combination of 2D PE and Fourier transform along the y-direction gives rise to azimuthal limitation on the horizontal plane for the resulting 3D solution. Pertinently, even for a fully Cartesian 3D PE model,[6,7] accuracy of the solution along or near the longitudinal direction (the horizontal direction that crosses the marching direction) is not assured because it is inevitable to employ asymptotic approximation on the square root operator. A possible solution to this problem is to conduct multiple calculations with the corresponding marching directions along different azimuths, retaining only the results that are assured accurate in each calculation, and then assembling them. However, for now this approach is not possible to implement in our model, since we have not incorporated longitudinal variation of bathymetry.
Great efforts are still required in order to provide this model with the ability to handle arbitrarily irregular fluid–elastic interfaces. For example, by using artificial absorption layers or perfectly matched layers on the two sides of the longitudinal direction, we can probably solve the 3D PE in Eq. (
PE models have been actively used as a tool to predict sound fields in range-dependent oceans. Apparently, it will continue to play this role due to its high efficiency compared with the direct methods, e.g., FEM. Once the capability of 3D seismo-acoustic PEs is well expanded, the predicted results for sound fields will be closer to truth than purely acoustic PEs.
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] | |
| [21] | |
| [22] | |
| [23] | |
| [24] | |
| [25] | |
| [26] | |
| [27] | |
| [28] | |
| [29] | |
| [30] | |
| [31] | |
| [32] | |
| [33] | |
| [34] | |
| [35] | |
| [36] | |
| [37] | |
| [38] | |
| [39] | |
| [40] |