
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
A multicomponent multiphase lattice Boltzmann model with large liquid–gas density ratios for simulations of wetting phenomena
Cite this Article
Zhang Qing-Yu, Sun Dong-Ke, Zhu Ming-Fang. A multicomponent multiphase lattice Boltzmann model with large liquid–gas density ratios for simulations of wetting phenomena. Chinese Physics B, 2017, 26(8): 084701 
Permissions
A multicomponent multiphase lattice Boltzmann model with large liquid–gas density ratios for simulations of wetting phenomena
† Corresponding author. E-mail:
Abstract
A multicomponent multiphase (MCMP) pseudopotential lattice Boltzmann (LB) model with large liquid–gas density ratios is proposed for simulating the wetting phenomena. In the proposed model, two layers of neighboring nodes are adopted to calculate the fluid–fluid cohesion force with higher isotropy order. In addition, the different-time-step method is employed to calculate the processes of particle propagation and collision for the two fluid components with a large pseudo-particle mass contrast. It is found that the spurious current is remarkably reduced by employing the higher isotropy order calculation of the fluid–fluid cohesion force. The maximum spurious current appearing at the phase interfaces is evidently influenced by the magnitudes of fluid–fluid and fluid–solid interaction strengths, but weakly affected by the time step ratio. The density ratio analyses show that the liquid–gas density ratio is dependent on both the fluid–fluid interaction strength and the time step ratio. For the liquid–gas flow simulations without solid phase, the maximum liquid–gas density ratio achieved by the present model is higher than 1000:1. However, the obtainable maximum liquid–gas density ratio in the solid–liquid–gas system is lower. Wetting phenomena of droplets contacting smooth/rough solid surfaces and the dynamic process of liquid movement in a capillary tube are simulated to validate the proposed model in different solid–liquid–gas coexisting systems. It is shown that the simulated intrinsic contact angles of droplets on smooth surfaces are in good agreement with those predicted by the constructed LB formula that is related to Young’s equation. The apparent contact angles of droplets on rough surfaces compare reasonably well with the predictions of Cassie’s law. For the simulation of liquid movement in a capillary tube, the linear relation between the liquid–gas interface position and simulation time is observed, which is identical to the analytical prediction. The simulation results regarding the wetting phenomena of droplets on smooth/rough surfaces and the dynamic process of liquid movement in the capillary tube demonstrate the quantitative capability of the proposed model.
Keyword:multicomponent multiphase lattice Boltzmann model;large density ratio;contact angle;capillary flow
1. Introduction
Over the last three decades, multiphase lattice Boltzmann (LB) models have developed rapidly and have been employed extensively in the field of computational fluid dynamics.[1–8] As a result of LB models not needing to explicitly track interfaces, these models are ideally suited to study physical phenomena in the multiphase flow systems, e.g., bubbles moving in the liquid phase,[9,10] wetting phenomena at the fluid–solid interfaces,[11–15] droplet–wall collisions,[16] and droplet splashing.[17] Among the current multiphase LB models, the pseudopotential LB scheme has attracted a lot of attention due to its computational efficiency and simplicity in coding.[1–5] The pseudopotential LB model imposes non-local interactions among fluid particles. Accordingly, when the interaction potentials are appropriately chosen, different fluid phases can be separated automatically.[8–21] The original multiphase pseudopotential LB model proposed by Shan and Chen[18] is, however, essentially limited to a small density ratio between the two fluid phases, owing to the increased spurious current at the curved interface between different phases.[1–3] As a result, the model becomes inappropriate for some real-world multiphase fluid flows with large density ratios, such as the water-vapor system.
Many efforts have been devoted to improving the performance of pseudopotential LB models, in particular to increasing the liquid–gas density ratio.[21–42] For single component multiphase (SCMP) LB models, there are two typical techniques to enlarge the density ratio of the two fluid phases: (i) introducing realistic equations of state (EOS),[21–23] and (ii) increasing the isotropy order of the interaction force.[24–28] Yuan and Schaefer[21] proposed an LB model in which the pseudopotential equations were derived from the different EOSs, rather than straightforwardly defined as a function of local density. By incorporating the appropriate EOS into the LB models, such as employing the Carnahan–Starling[22] or van der Waals[23] real gas EOS, the liquid–gas density ratio could increase to higher than 1000:1.
As mentioned above, in the original LB models, the spurious current appearing near a curved phase interface deteriorates the stability of calculations and thus restricts the density ratio of the liquid–gas phases to a small range.[24] To solve the problem, researchers have made efforts to seek the best compromise between a large liquid–gas density ratio and small spurious current.[25–28] Shan[25] considered that the spurious currents existing in the multiphase LB models are caused by insufficient isotropy of the discrete gradient operator. He calculated the interaction force with higher order symmetry, and hence the spurious current effectively decreased. Sbragaglia et al.,[26] and Falcucci et al.[27,28] introduced a mid-range potential interaction into the pseudopotential LB models using two layers of neighboring nodes to calculate the interaction force. Using this approach, the spurious currents at the phase interfaces are diminished by the higher isotropy order. Other techniques, aiming at reducing the spurious currents to increase the liquid–gas density ratios of the pseudopotential LB models, include grid refinement,[29,30] adopting proper force schemes,[31–35] and using the multi-relaxation-time scheme.[36–38]
All the above approaches concern SCMP LB models. In contrast, there are few reports on increasing the liquid–gas density ratios of multicomponent multiphase (MCMP) pseudopotential LB models, yet it is well known that many multiphase flows in nature and practice are composed of multiple chemical components, such as water–air and alloy melt–hydrogen gas flow systems. Liu et al.[39] and Chen et al.[40] elevated the liquid–gas density ratio to a value of higher than 100:1 by imposing an interaction force among the same component particles in the MCMP model. Bao and Schaefer[41] also incorporated the interaction force among the same component particles, which was set to be 103 times higher than that among the different component particles in previous MCMP models. Using such an approach, the density ratio was increased to 1000:1. This approach presents a weakness, because the imposed interaction force among the same component particles might give rise to some problems. For example, it affects the solubility of one component in the other components.[1] Moreover, it also limits the achievable contact angle ranges of droplets on solid surfaces.[40] Another important topic in the field of the MCMP pseudopotential LB model is to implement the different molecular weights (pseudo-particle mass) with respect to the different fluid components. The approaches that have been proposed include (i) applying the interpolation technique or modifying the equilibrium distribution function to derive the distribution functions for different fluid components[43,44] and (ii) adopting the finite-different-based LB model.[45] The two approaches are feasible when the time steps of the different fluid components are identical. However, the studies of adopting different time steps with respect to the different fluid components remain limited in the literature.
In the present work, based on the original MCMP pseudopotential LB model developed by Shan and Chen,[18] a modified MCMP pseudopotential LB model is proposed to simulate the liquid–gas flow with large density contrasts. In the present model, the interaction force among the same component particles is not considered. Instead, we employ a scheme that adopts higher isotropy order to calculate the interaction force, and is combined with a different time step method. Using this approach, the liquid–gas density ratio is enlarged, and the spurious current is restricted for the multicomponent multiphase system. The proposed model is used to simulate the wetting behavior of droplets on smooth/rough solid surfaces and the dynamic process of liquid movement in a capillary tube. The simulated intrinsic and apparent contact angles of the droplets on solid surfaces, as well as the simulated time evolution of the moving liquid–gas interface position in a capillary tube, are compared with theoretical predictions.
2. Model description
where 




where 


where the weight coefficients ωi are given as 




where mσ is the pseudo-particle mass of the σ-th component. In the present study, the time steps of components 1 and 2 are assumed to be 





4 ), the time steps are taken into consideration when calculating the microscopic momentum. 
4 ) is the interaction force acting on the σ-th component, which includes the fluid–fluid cohesion force 

where σ and 



where 

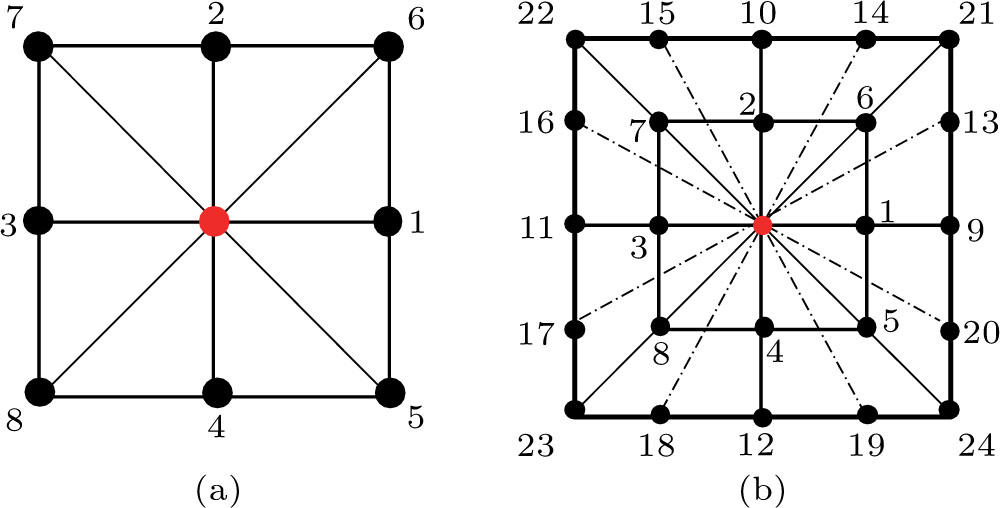
1(b) ) and the second layer (nodes 9–24 in Fig. 1(b) ) of the neighboring nodes, respectively. The numerical values of the weight coefficients, namely, p1i and p2i, are listed in Table 1 .[25–28,42] In the present study, the periodic boundary condition is imposed on the walls of the computational domain. For the domain consisting of 



6 ), the neighboring nodes of the fluid particles at nodes 





where 

The techniques used in the present MCMP model involve (i) using two layers of neighboring nodes to calculate the interaction forces between the two components, and (ii) adopting different time steps for the two components.
Figure 






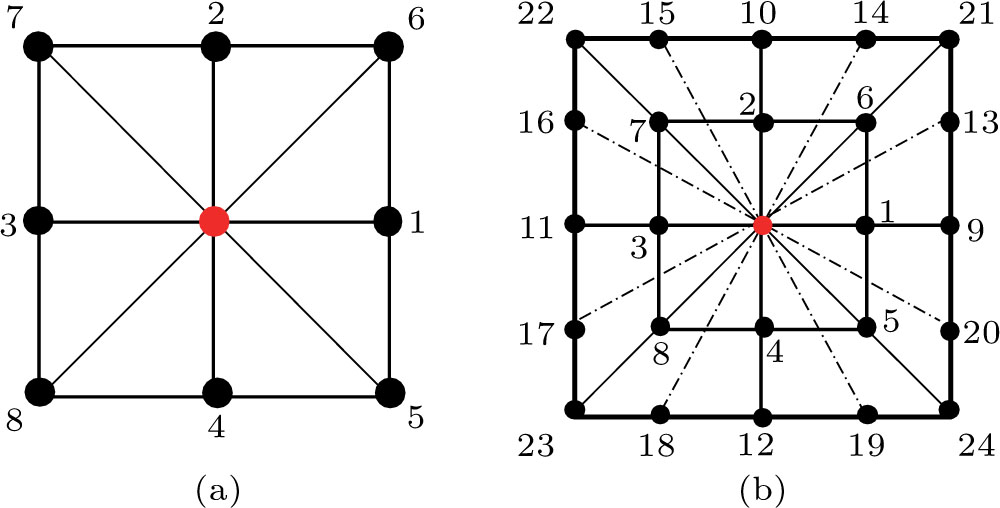 | Fig. 1. (color online) Sketch of the node distributions for calculating the fluid–fluid cohesion force in (a) E4 and (b) E8 LB models. |
The two fluid components are represented by two sets of distribution functions. The processes of particle propagation and collision are governed by the LB equations using the two-dimension, nine-velocity (D2Q9) scheme:
 |
 |
 |
 |
In the original MCMP pseudopotential LB model with E4 isotropy order, the fluid–fluid cohesion force acting on the σ-th component, which generates different fluid phases, is calculated from
 |
As described above, for reducing the spurious current at the phase interface, the present model adopts the E8 isotropy order to calculate the cohesion force. Accordingly, equation (
 |
When the system includes a solid phase, the fluid–solid adhesion force, 
 |
3. Results and discussion
3.1. Spurious current
In the present study, the spurious current is calculated from
 |
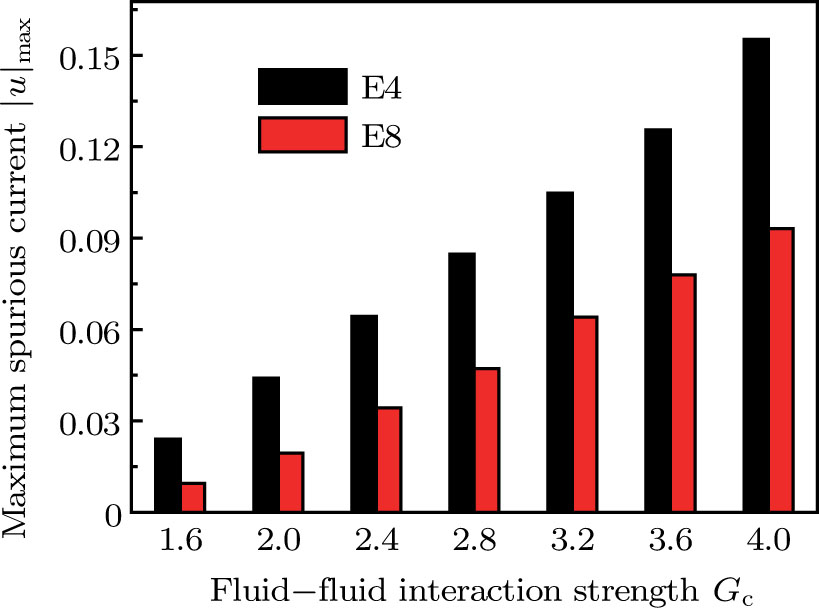
The E8 model, having a higher isotropy order than the original E4 model, is adopted to reduce the spurious current that may deteriorate the stability of the LB model. In order to examine the effect of spurious current reduction, the calculations of a stationary droplet equilibrated with gas phase are conducted by using the E4 and E8 MCMP LB models, respectively. For simplicity, the time steps and the pseudo-particle mass values of the two components are set to be 



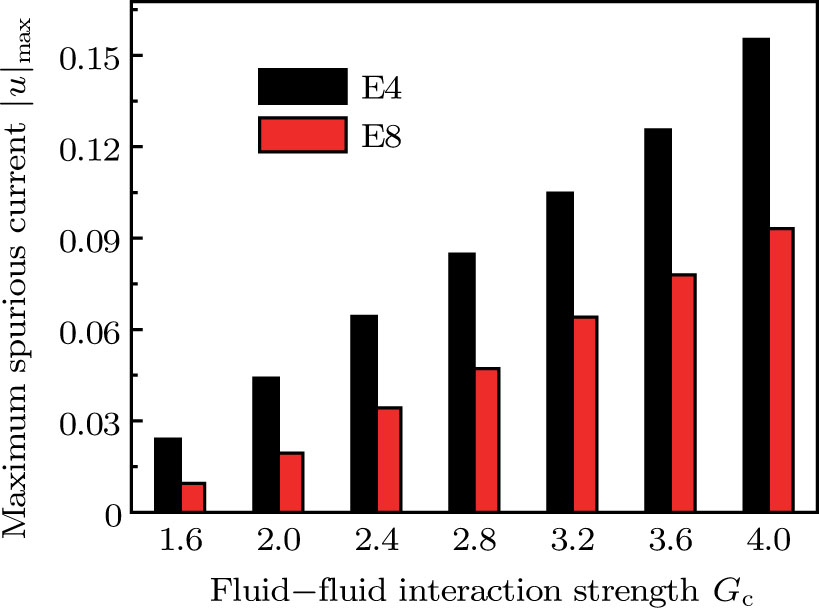 | Fig. 2. (color online) Comparison between the maximum spurious currents varying with the fluid–fluid interaction strength from the E4 model and those from the E8 model. |
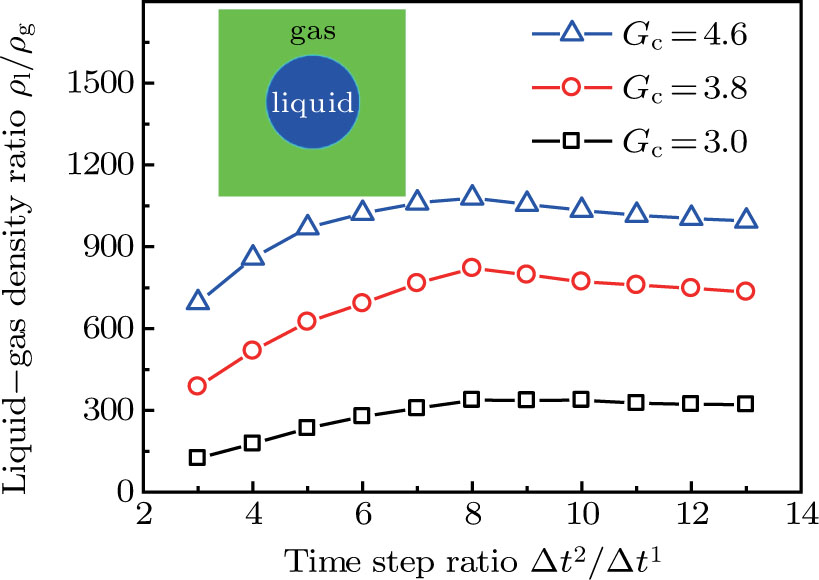
3.2. Liquid–gas density ratio
In this study, the liquid–gas density ratio is obtained from the calculations of a static droplet surrounded by the gas phase. The computation domain size and the initial droplet radius are identical to those in Fig. 










Figure 













 | Fig. 3. (color online) Liquid–gas density ratios varying with time step ratio for various fluid–fluid interaction strengths. |
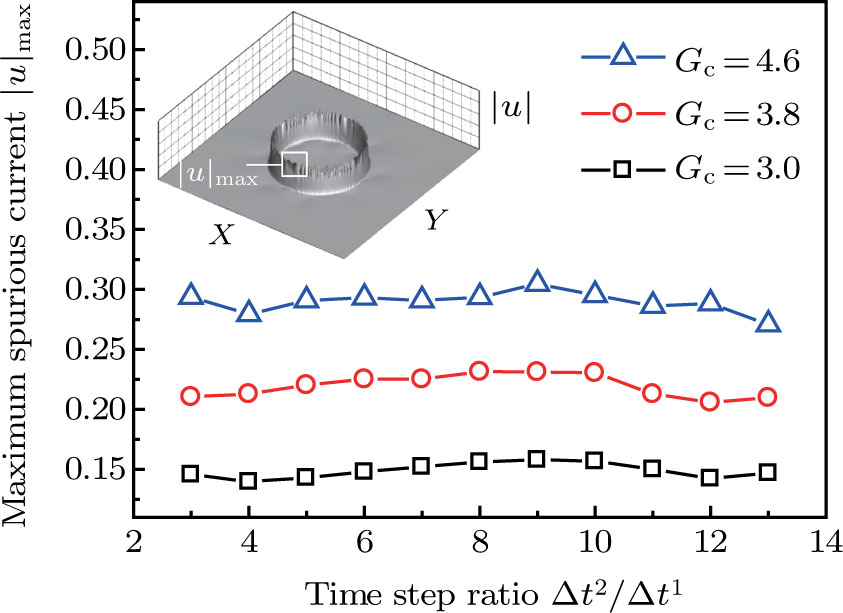
As discussed above, the spurious current appearing at the interface is one of the key factors that hinder the liquid–gas density ratio from being elevated. The influences of the fluid–fluid interaction strength 






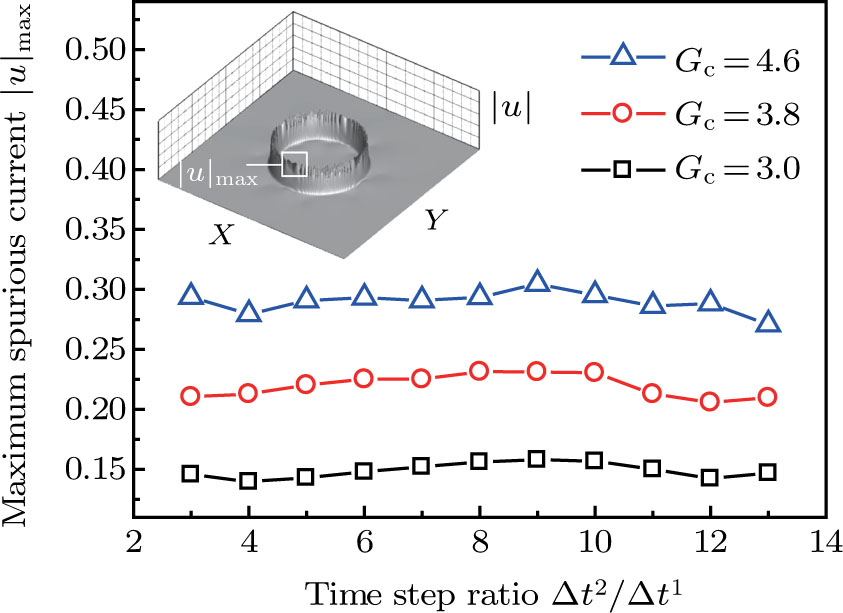 | Fig. 4. (color online) Plots of maximum spurious current varying with time step ratio for various fluid–fluid interaction strengths. |
It should be noted that the maximum liquid–gas density ratios discussed above are for the case of the static multiphase flow. When the external fluid flow is introduced in the computation domain, e.g., the shear flow,[46] the achievable maximum liquid–gas density ratio is found to become lower than that obtained from the static liquid–gas flow.
3.3. Intrinsic contact angles of droplets on a smooth solid surface
where 



8 ) has a form similar to the empirical formula suggested by Sukop and Thorne[19] and Huang et al.[47]
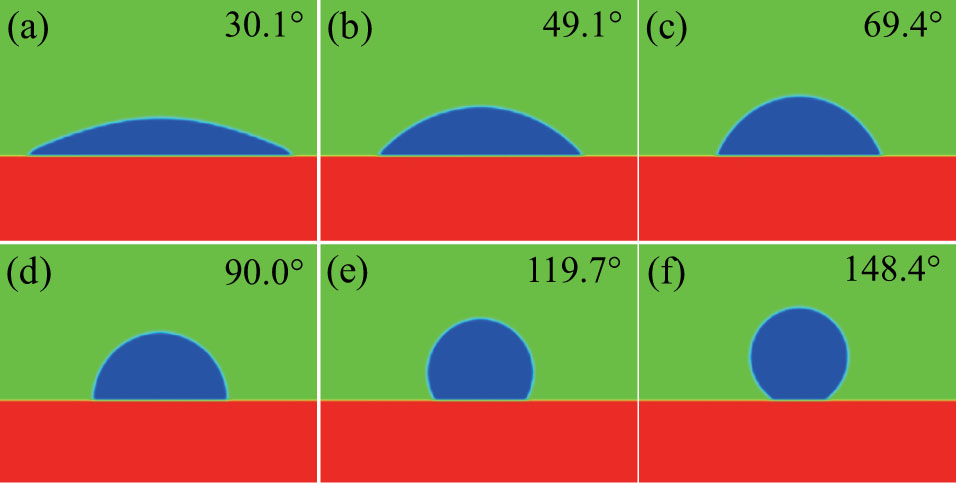
The proposed model is used to simulate droplets on a smooth solid surface with various intrinsic contact angles. The simulation domain is composed of 100 × 100 lattice units and the droplet radius is initially taken as 15 lattice units. The time step ratio is fixed as 







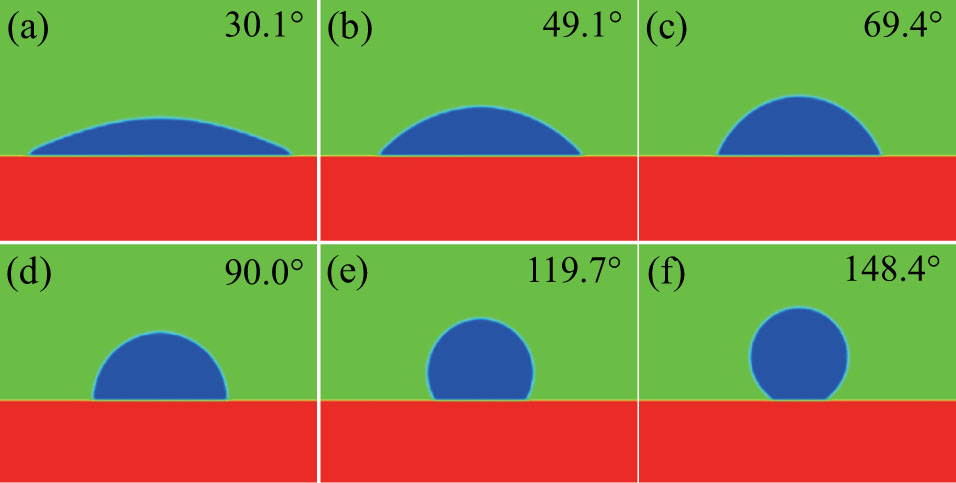 | Fig. 5. (color online) Simulated contact angles with the fluid–fluid interaction strength of        |
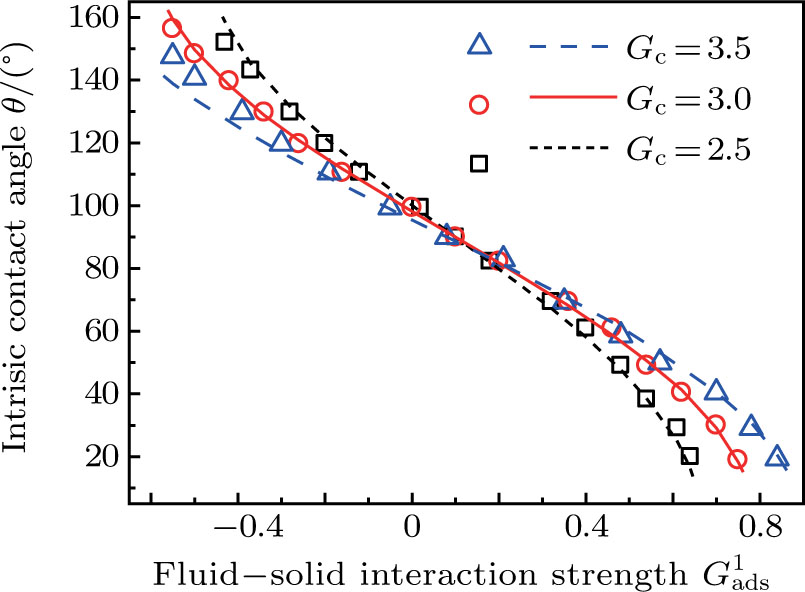
Sukop and Thorne[19] and Huang et al.[47] introduced two forms of empirical formulas that are composed of the LB interaction strengths and related to Young’s equation. The empirical formulas can be used to predict the intrinsic contact angles simulated using the original MCMP pseudopotential LB models. Since the present model implements the higher isotropy order and the different-time-step method, the previous empirical LB Young equations in the literature[19,47] are not appropriate for this work. Thus, a new empirical formula of Young’s equation is established based on the simulations of Fig. 


 |
Figure 













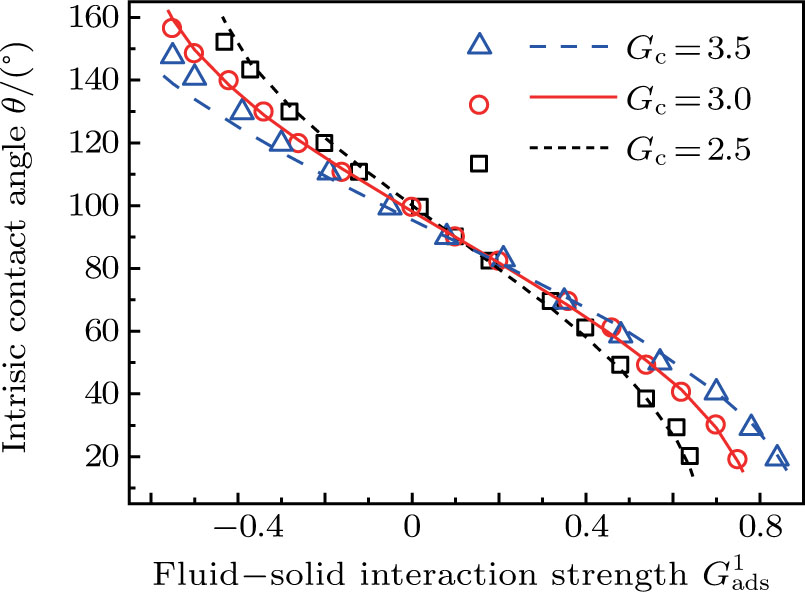 | Fig. 6. (color online) Comparison between LB simulations (symbols) and predictions by the empirical formula of Young’s equation (lines) regarding the droplet contact angles on a smooth surface. |
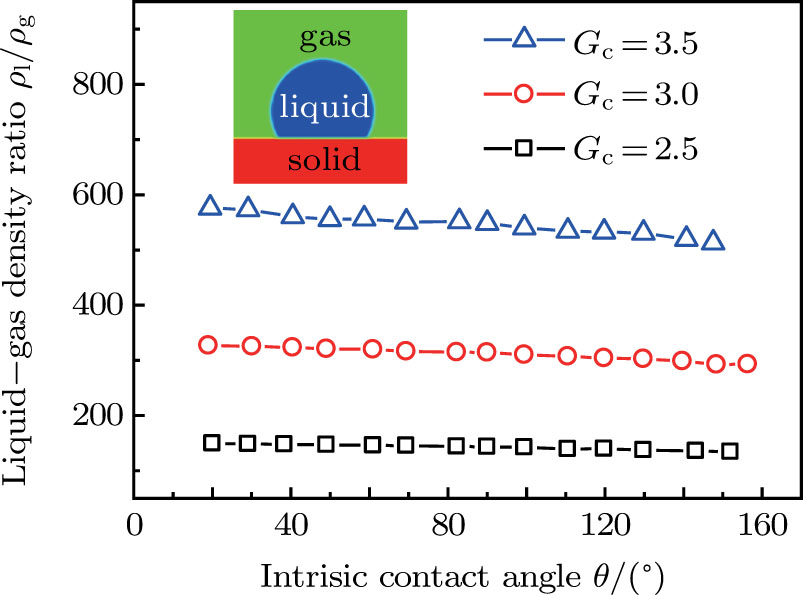
Figure 


 | Fig. 7. (color online) Liquid–gas density ratios as a function of intrinsic contact angle in the presence of solid phase for various fluid–fluid interaction strengths. |
Comparing Fig. 


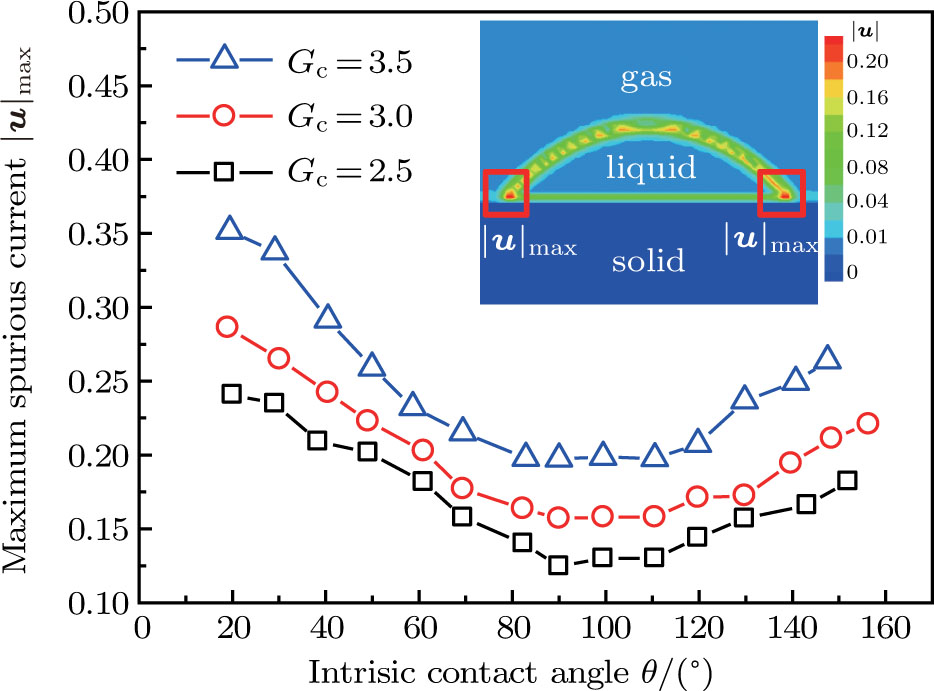
Figure 








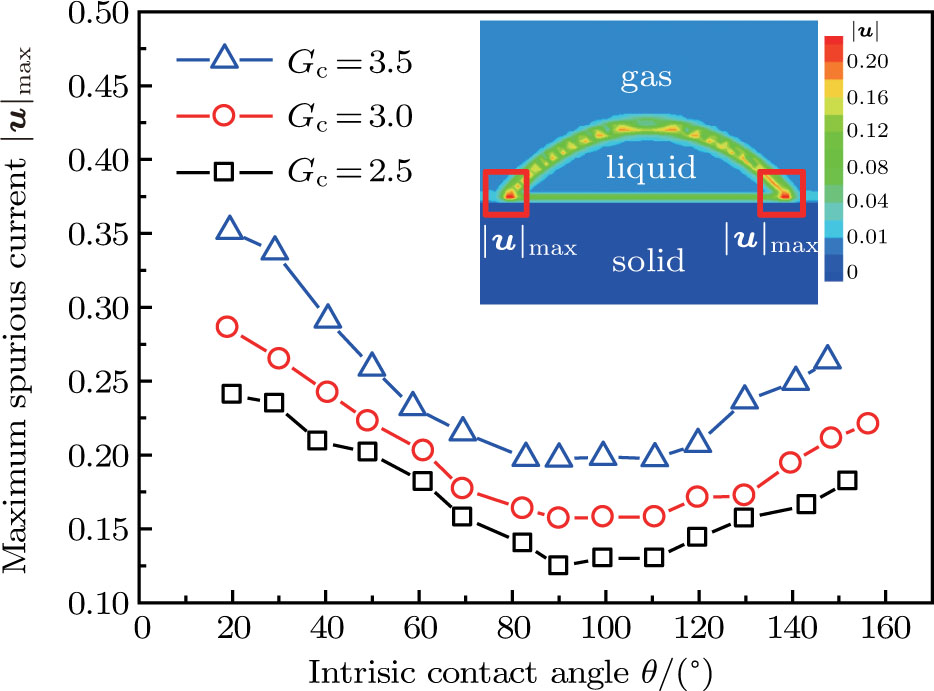 | Fig. 8. (color online) Maximum spurious currents as a function of intrinsic contact angle in the presence of solid phase for three diferent fluid–fluid interaction strengths. |
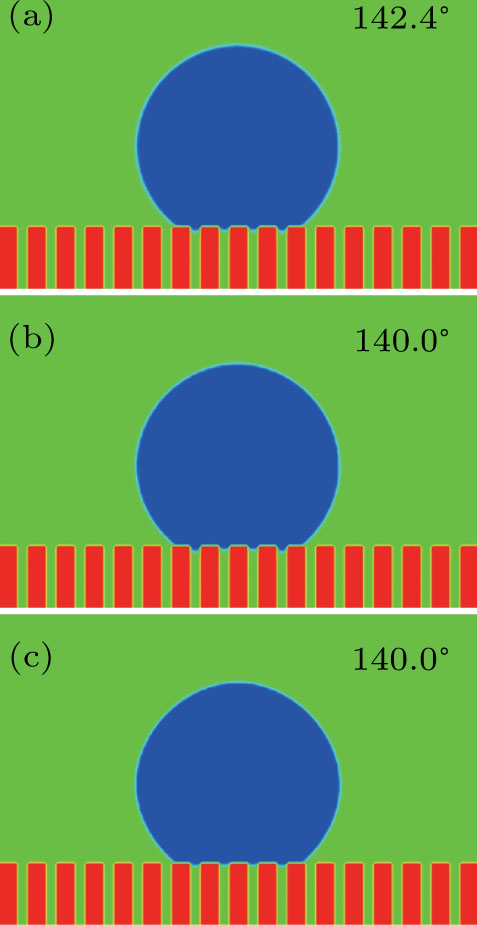
3.4. Apparent contact angles of a droplet on rough solid surfaces
where 
9 , f is calculated from 

9 ), the apparent contact angle is computed to be 
9 and the predictions of Eq. (9 ) are all less than 3.2%. In the work of Li et al.,[48] the simulated apparent contact angles on the rough surface are all around 146.0°. It can be found that the simulated apparent contact angles in Fig. 9 are also close to the simulation results obtained by Li et al.[48] These obtained agreeable results indicate that the proposed MCMP LB model can reasonably describe the wetting phenomena of droplets on rough surfaces in solid–liquid–gas systems with various interaction strengths.
Li et al.[48] performed simulations of the apparent contact angles of droplets on rough surfaces by using two types of SCMP pseudopotential LB models. The intrinsic contact angles of the droplets in their LB models were regulated close to 138°. After the steady states of the droplets were achieved, the apparent contact angles were measured and compared with the predictions of Cassie’s law. To further demonstrate the validity of the present MCMP LB model, the wetting behaviors of droplets on rough surfaces are also simulated. The computation domain consists of 150 × 100 lattice units and an initial droplet with a radius of 30 lattice units is placed on the rough surface. As shown in Fig. 






 |
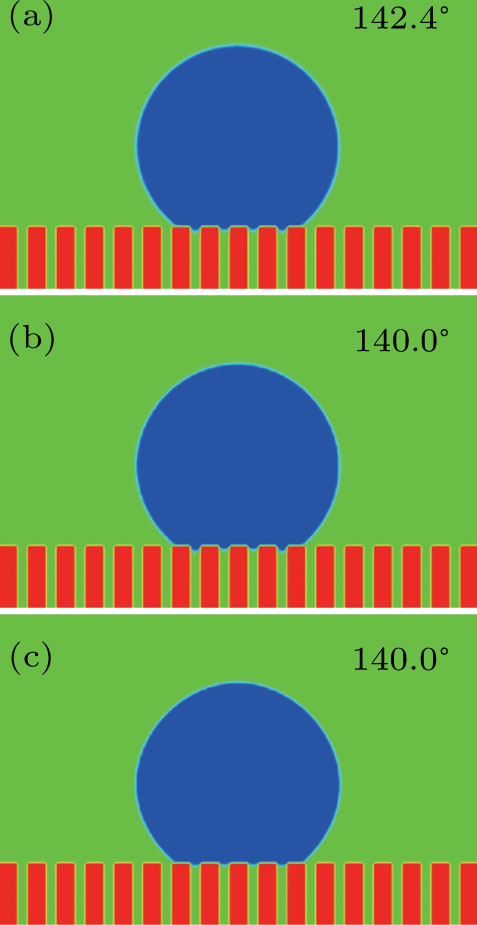 | Fig. 9. (color online) Simulated patterns of liquid droplets sitting on a rough surface. Three cases of simulations have identical intrinsic contact angles of 137.7° by adopting (a)       |
3.5. Dynamics of capillary flow
where γ is the surface tension, θ is the intrinsic contact angle, r is the width of the capillary tube in the 2D study, ξ is the real-time position of the liquid–gas interface in the capillary tube, 

where M is a parameter and defined as 
3.4 , with respect to the three liquid–gas regimes determined by 


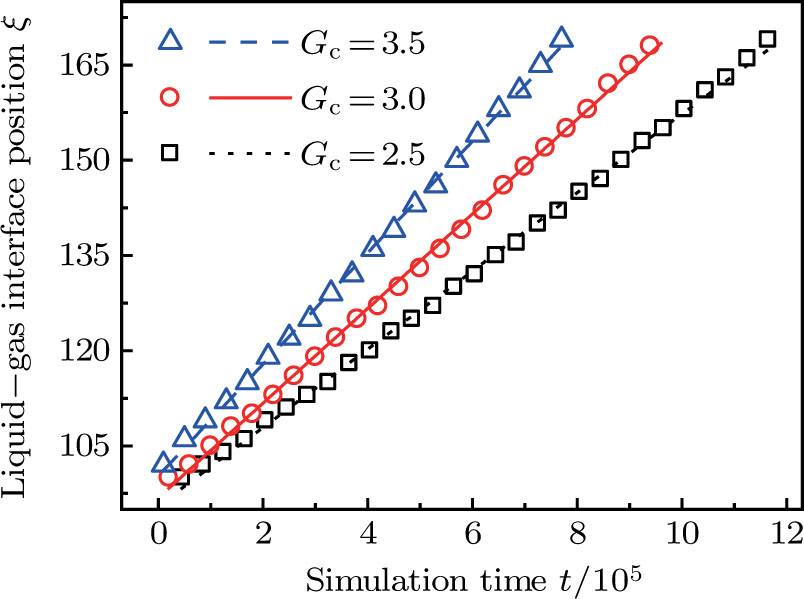
11 ) is a constant in the simulations of the three liquid–gas regimes. It can be seen from Eq. (11 ) that the variation of the liquid–gas interface position, ξ, with respect to simulation time, t, is linear. The slope of the ξ–t line is proportional to the surface tension, γ. In the present MCMP LB model, the surface tension can be calculated through Laplace’s law by measuring the pressure difference across the liquid–gas interface and the radius reciprocal of the spherical droplets. It is obtained that the surface tensions of the three liquid–gas regimes are 






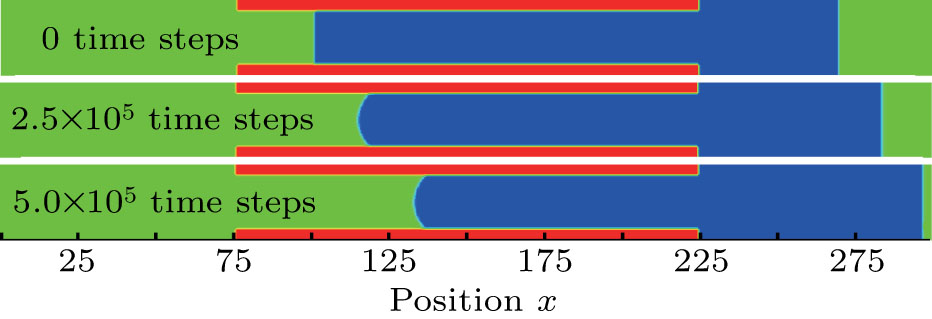
The above contact angle simulations are all for the static cases. In order to demonstrate the validity of the present MCMP LB model for the simulation of fluid dynamics in the liquid–gas–solid coexisting system, the dynamic process of liquid movement in a capillary tube is simulated. Liquid moves in a capillary tube due to the pressure difference over the curved liquid–gas interface, which is simulated using several types of LB multiphase models, and can be taken as a benchmark for assessing the capability of a multiphase model for the simulation of dynamic problems.[50–52] The position of the moving liquid–gas interface in the capillary tube can be expressed as follows:[52]
 |
In the present study, the computation domain consists of 300 × 25 lattice units. In the middle portion of the computation domain, namely, 






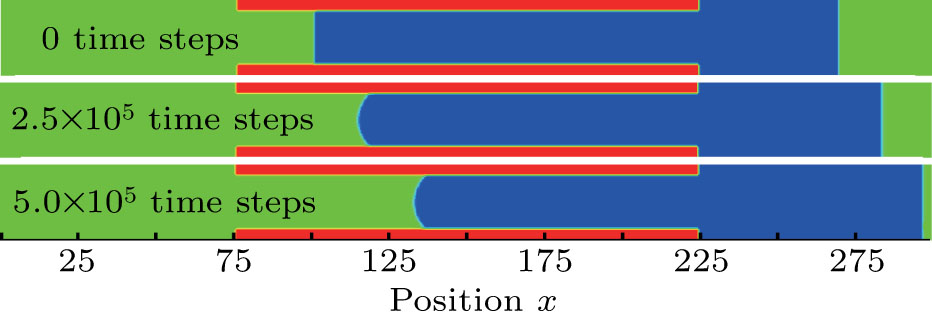 | Fig. 10. (color online) Simulated liquid movements in a capillary tube (red: solid, blue: liquid, green: gas). |
Since the relaxation times of the two components are adopted as 

 |
Figure 










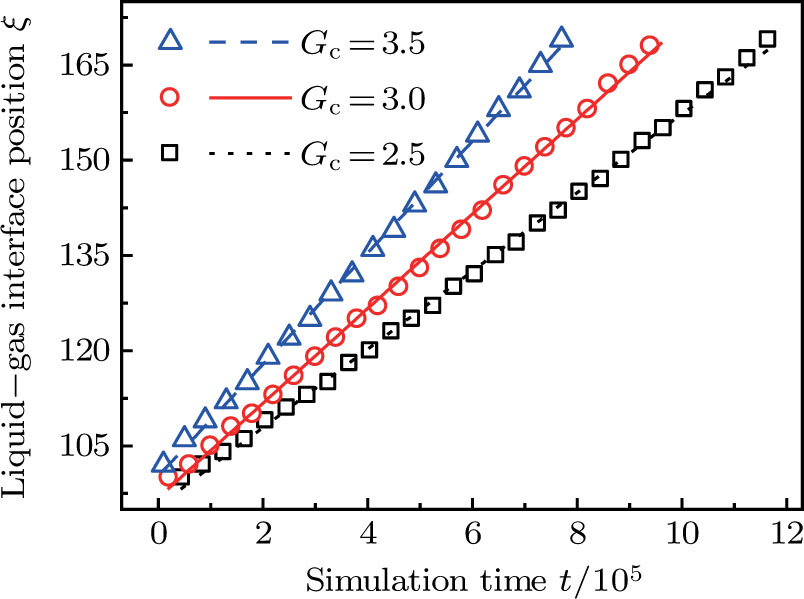 | Fig. 11. (color online) Time evolutions of the liquid–gas interface position in a capillary tube for various fluid–fluid interaction strengths (symbols: LB simulations, lines: linear fitting). |
4. Conclusions
In the present study, a modified multicomponent multiphase (MCMP) pseudopotential lattice Boltzmann (LB) model with large liquid–gas density ratios is proposed. Two layers of neighboring nodes are employed to calculate the fluid–fluid cohesion force, which can elevate the isotropy order of the interaction force and effectively reduce the spurious current. Different time steps for the two fluid components, with a large pseudo-particle mass contrast, are implemented in the proposed MCMP LB model. It is found that the liquid–gas density ratio can be elevated by increasing 






The maximum spurious current appears at the liquid–gas interface for the liquid–gas system and at the solid–liquid–gas three-phase contact points for the flow system in the presence of a solid phase. The maximum spurious current is found to be obviously elevated by increasing 




Different contact angles of droplets on both smooth and rough solid surfaces are simulated by using the proposed MCMP LB model. The different intrinsic contact angles are obtained by adjusting the interaction strengths. An empirical formula of Young’s equation containing LB interaction strengths is proposed to predict the intrinsic contact angles. The intrinsic contact angles obtained from the simulations and calculated from the suggested LB Young’s equation are in good agreement with each other. With the droplets sitting on the tops of the pillars of a rough surface, the simulated apparent contact angles with various interaction strengths accord well with the predictions of Cassie’s law. Moreover, the dynamic process of liquid movement in a capillary tube is simulated. Under the condition of the liquid and gas phases having an identical dynamic viscosity, the linear relation between the liquid–gas interface position in the capillary tube and simulation time is observed, and the slope of the linear line is approximately proportional to the surface tension. These simulation results of the liquid movement in a capillary tube are consistent with the analytical predictions. The simulations of the static and dynamic problems show that the proposed MCMP LB model is capable of reasonably simulating the wetting phenomena in the solid–liquid–gas coexisting systems with large liquid–gas density ratios.
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] | |
| [21] | |
| [22] | |
| [23] | |
| [24] | |
| [25] | |
| [26] | |
| [27] | |
| [28] | |
| [29] | |
| [30] | |
| [31] | |
| [32] | |
| [33] | |
| [34] | |
| [35] | |
| [36] | |
| [37] | |
| [38] | |
| [39] | |
| [40] | |
| [41] | |
| [42] | |
| [43] | |
| [44] | |
| [45] | |
| [46] | |
| [47] | |
| [48] | |
| [49] | |
| [50] | |
| [51] | |
| [52] |