









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Multiple exp-function method for soliton solutions of nonlinear evolution equations
Cite this Article
Yıldırım Yakup, Yaşar Emrullah. Multiple exp-function method for soliton solutions of nonlinear evolution equations. Chinese Physics B, 2017, 26(7): 070201 
Permissions
Multiple exp-function method for soliton solutions of nonlinear evolution equations
† Corresponding author. E-mail:
Abstract
We applied the multiple exp-function scheme to the (2+1)-dimensional Sawada–Kotera (SK) equation and (3+1)-dimensional nonlinear evolution equation and analytic particular solutions have been deduced. The analytic particular solutions contain one-soliton, two-soliton, and three-soliton type solutions. With the assistance of Maple, we demonstrated the efficiency and advantages of the procedure that generalizes Hirota’s perturbation scheme. The obtained solutions can be used as a benchmark for numerical solutions and describe the physical phenomena behind the model.
Keyword:(2+1)-dimensional Sawada-Kotera (SK) equation;(3+1)-dimensional nonlinear evolution equation (NLEE);multiple exp-function method;multiple wave solutions
1. Introduction
and (3+1)-dimensional nonlinear evolution equation (NLEE)[14]
As is well known, nonlinear evolution equations (NLEEs) are encountered in many physical problems as a result of modelling related with the phenomena which occur in nature. For example, the Korteweg–de Vries (KdV) equation arises in modelling shallow water waves, and the Burgers equation appears in nonlinear acoustic waves. NLEEs emerge in a variety of contexts such as, physics, fluid mechanics, material science, optical fibers, solid state physics, chemical kinematics, and finance. Solitons which are self-reinforcing solitary wave packets are one of the most important areas of research in the field of nonlinear optics.[1] Therefore, an important problem is obtaining solutions of these equations. In the last three decades, many methods were developed for constructing the analytical solutions of NLEEs. Some of them are listed in Refs. [2]–[8].
In 2010, Ma et al.[9] suggested the multiple exp-function method as a new constructive way for obtaining the multi-soliton solutions of NLEEs. The useful multiple exp-function method is widely used by many such as in Refs. [10] and [11] and by the reference therein.
The main objective of this study is to build multi-soliton solutions of some multi-dimensional NLEEs by applying the multiple exp-function method. For this goal we will consider (2+1)-dimensional Sawada–Kotera (SK) equation[12]
 |
 |
As can be seen, the above equations comprise the integral terms; therefore, we convert Eqs. (
 |
Then, equations (
 |
 |
Up to date, the (2+1) dimensional Sawada–Kotera and (3+1)-dimensional nonlinear evolution equations have been studied by many researchers from different aspects (see, Refs. [12], [13], and [14]–[16]).
The paper is structured as follows. In Section
2. Multiple exp-function method
Now, we shortly present the method step by step. The method will be given for the (1+1) dimensional NLEEs but surely it can be extended to the multi-dimensional case too. The basic steps of the multiple exp-function method are prescribed as follows.[17–19]
3. Application of the multiple exp-function method
3.1. Application to the (2+1)-dimensional SK equation
In this subsection, our goal is to apply the extended multiple exp-function to Eq. (
3.1.1. One-wave solution
where A0, A1, 
12 ) into Eq. (4 ) and making the cumbersome calculations by Maple, we obtain the dispersion relation w1 and A1 as follows:
We consider the following form as one wave solution:
 |
 |
 |
3.1.2. Two-wave solution
where p and q are defined by
with γ being a constant.
We now construct the two-wave solution with the following ansatz:
 |
 |
 |
Applying the multiple exp-function algorithm by Maple leads to the following solution:
 |
3.1.3. Three-wave solution
with p and q being defined by
where γ is a constant.
We next consider the three-wave function
 |
 |
 |
Applying the multiple exp-function algorithm by Maple leads to the following solution:
 |
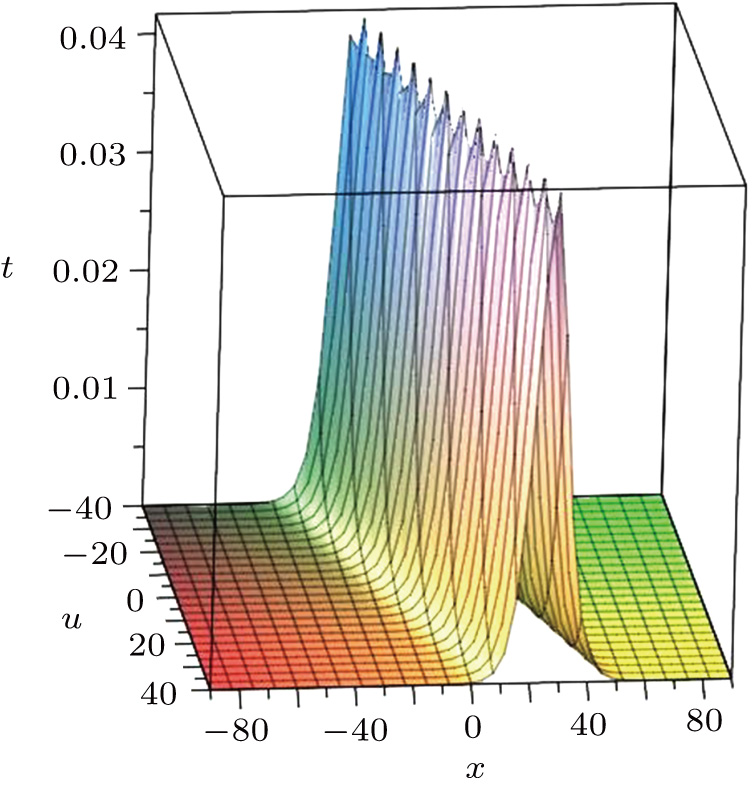
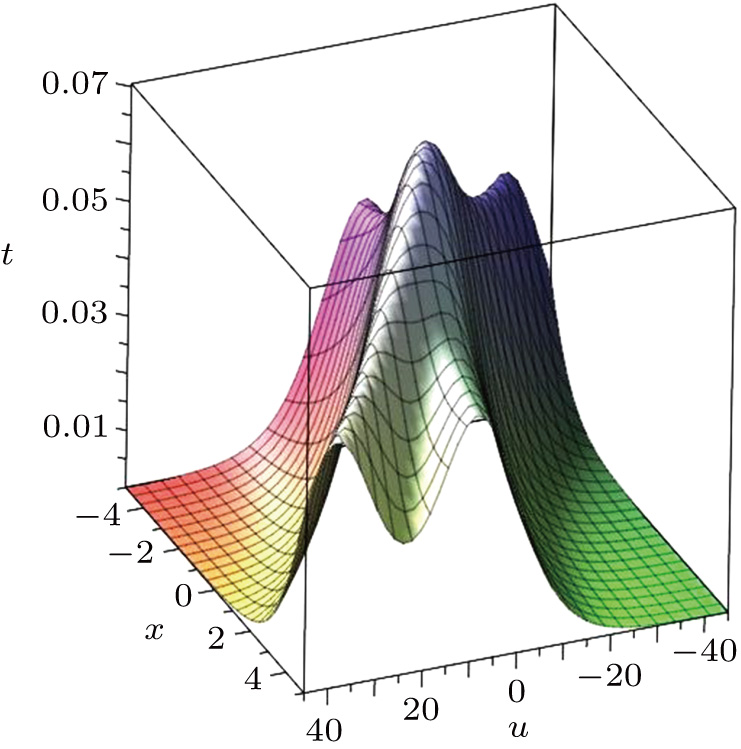
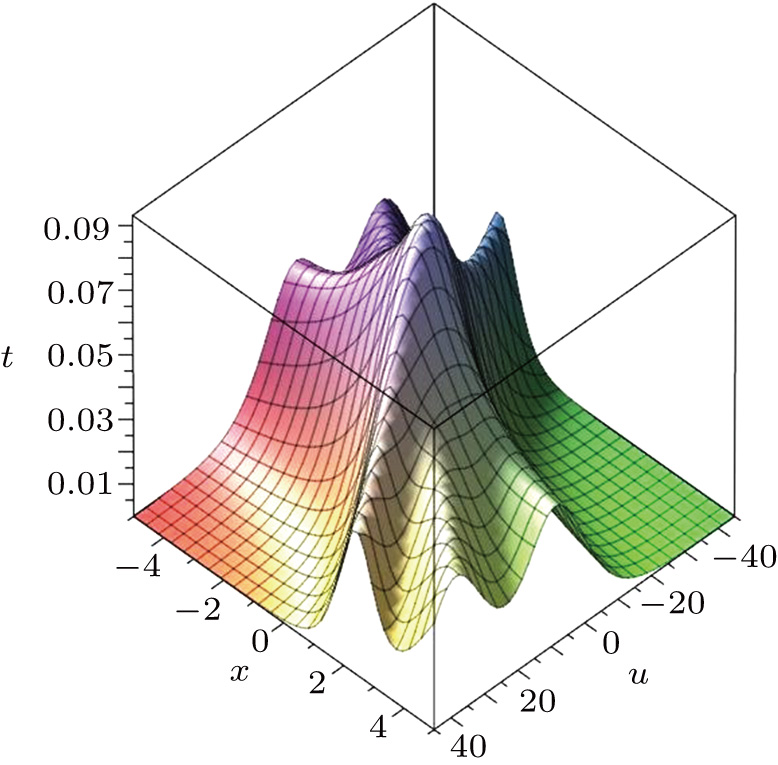
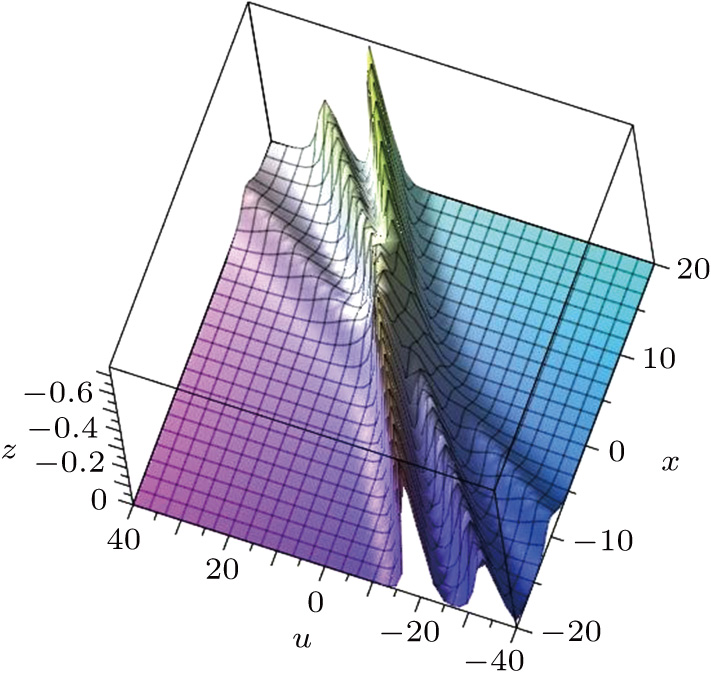
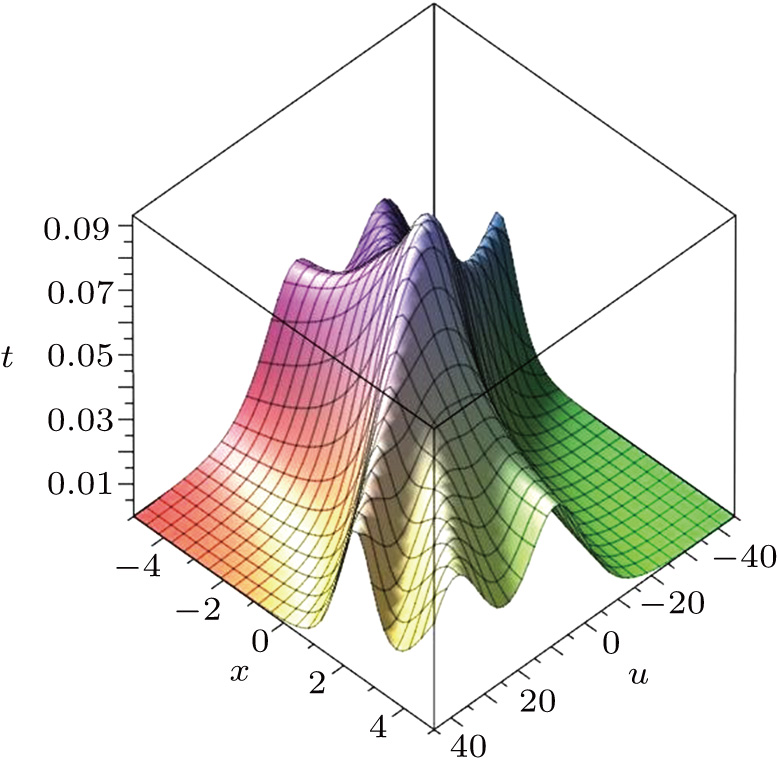
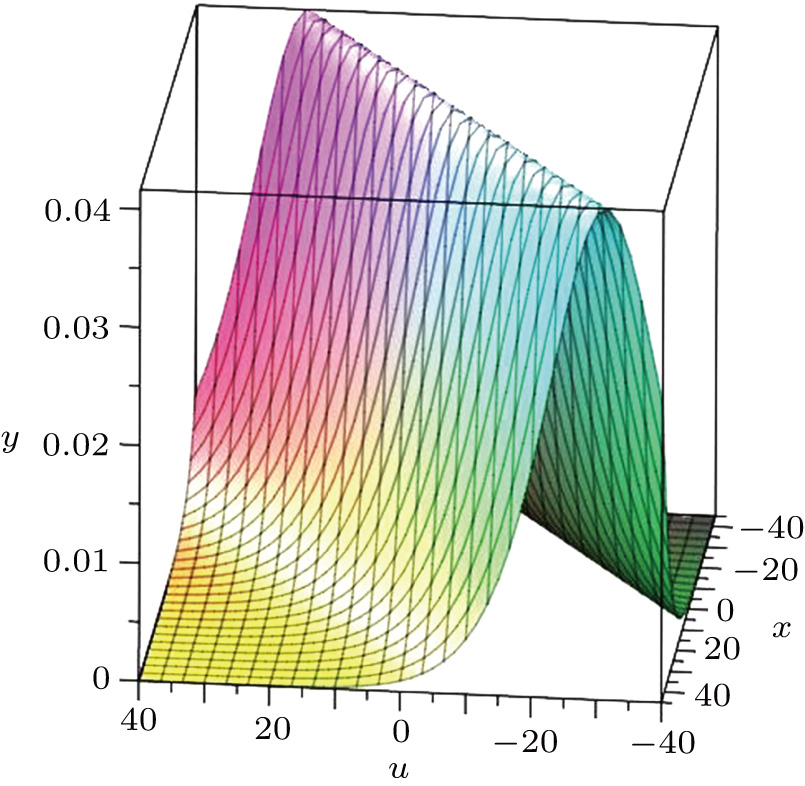
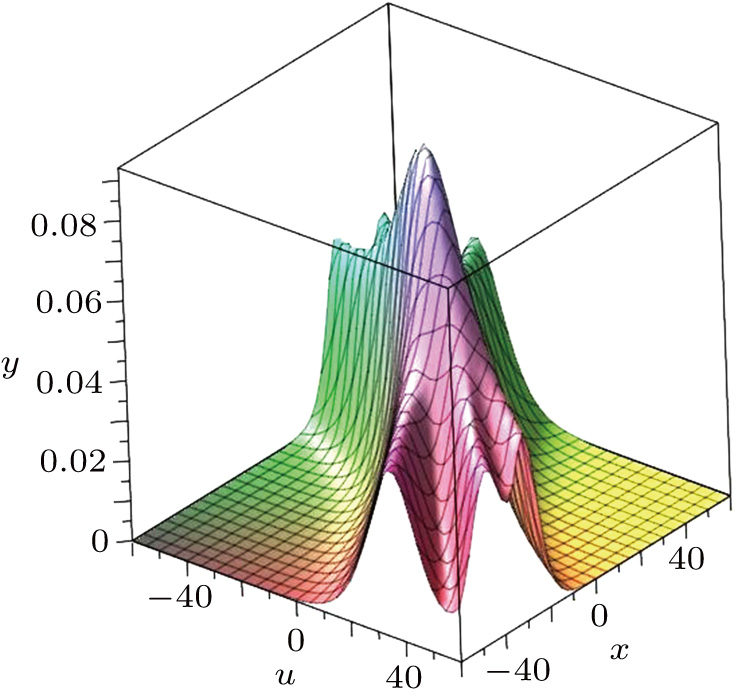
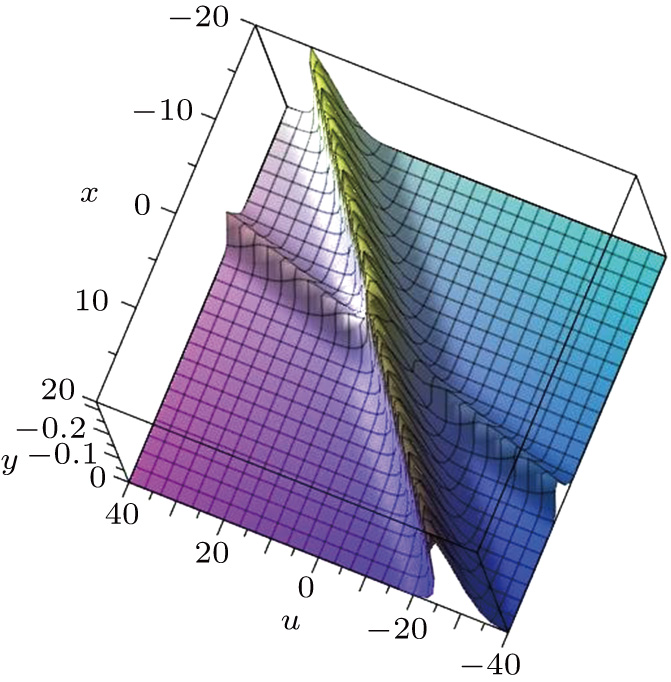
The above solutions are plotted in Figs.
 | Fig. 1. (color online) Plot of Eq. (     |
 | Fig. 2. (color online) Pot of Eq. (    |
 | Fig. 3. (color online) Plot of Eq. (      |
 | Fig. 4. (color online) Plot of Eq. (     |
 | Fig. 5. (color online) Plot of Eq. (    |
 | Fig. 6. (color online) Plot of Eq. (      |
 | Fig. 7. (color online) Plot of Eq. (     |
 | Fig. 8. (color online) Plot of Eq. (    |
 | Fig. 9. (color online) Plot of Eq. (      |
3.2. Application to the (3+1)-dimensional nonlinear evolution equation
In this subsection, our aim is to apply the extended multiple exp-function method to Eq. (
3.2.1. One-wave solution
with
We consider again the following ansatz for obtaing the one-wave solution of Eq. (
 |
 |
Then the corresponding one-wave solution is given by
 |
 |
 |
3.2.2. Two-wave solution
where γ is a constant and the resulting two-wave solution is
with
For the two-wave solution of Eq. (
 |
 |
 |
 |
3.2.3. Three-wave solution
where γ is a constant and the resulting three-wave solution is
with the following cases:
For the three-wave solution, one can take
 |
 |
 |
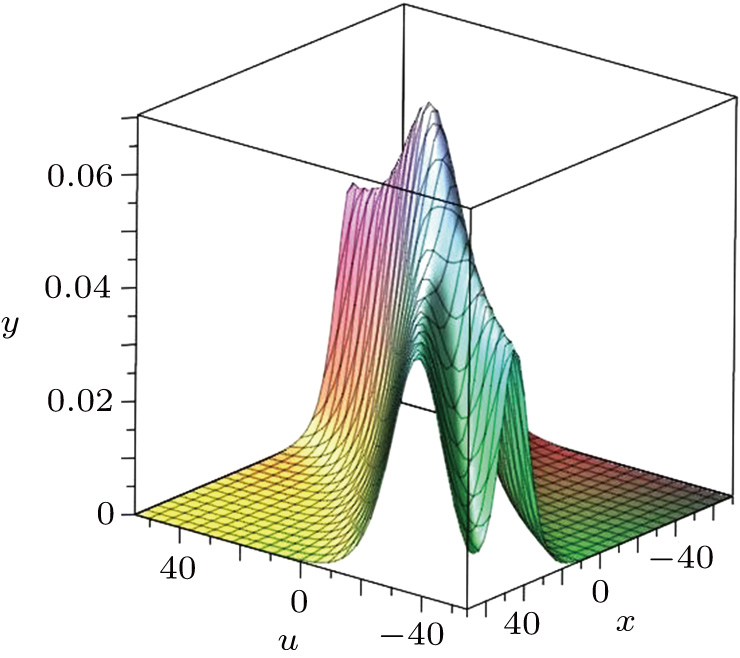
The above solutions are plotted in Figs.
 | Fig. 10. (color online) Plot of Eq. (      |
 | Fig. 11. (color online) Plot of Eq. (      |
 | Fig. 12. (color online) Plot of Eq. (      |
 | Fig. 13. (color online) Plot of Eq. (      |
 | Fig. 14. (color online) Plot of Eq. (      |
 | Fig. 15. (color online) Plot of Eq. (      |
4. Concluding remarks
We considered the (2+1)-dimensional Sawada–Kotera equation and (3+1)-dimensional nonlinear evolution equation. We have used the multiple exp-function method to derive the analytic wave solutions with physical structures. The obtained solutions are one-, two-, and three-soliton solutions. The results for Eqs. (
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] | |
| [21] |