Cooperative impulsive formation control for networked uncertain Euler–Lagrange systems with communication delays
School of Astronautics, Harbin Institute of Technology, Harbin 150001, China
† Corresponding author. E-mail:
sunyanchao@hit.edu.cn
1. IntroductionWith the development of the research community of system control, cooperative control of multi-agent systems (MAS) has gained increasing attention for the advantages of completing more complex assignments and increasing system reliabilities.[1] With these advantages, cooperative control of MAS has been used in many fields, such as the consensus of wireless networks,[2] synchronization of robots,[3] and formation of spacecrafts.[4] Thus, the cooperative control of MAS is a significant research issue.
One of the basic research problems in cooperative control of MAS is the distributed consensus problem, in which the distributed consensus control law is designed for each agent such that all the agents converge to a common state.[5] To solve the distributed consensus problem, an average-consensus control algorithm was investigated in Ref. [6] for the first-order linear systems under a connected undirected graph. The authors in Ref. [7] extended the results in Ref. [6] to the double integrator systems under a directed graph with a directed spanning tree.
Different from the distributed consensus control for the networked linear systems,[5–7] Liu et al.[8] designed a distributed consensus algorithm for the networked Euler–Lagrange systems with parametric uncertainties under a jointly connected undirected graph. The Euler–Lagrange system is a special second-order nonlinear system, which can be used to represent a large class of practical mechanical systems, such as underwater vehicles, robots, and satellites.[9] The distributed adaptive coordination for multiple Euler–Lagrange systems under a directed graph was developed in Refs. [10] and [11]. In Ref. [12], the synchronization problem of networked uncertain Euler–Lagrange systems on directed communication topologies was investigated.
For the distributed control problem of networked systems, model uncertainties, stochastic disturbances, and communication constraints are mainly considered. Unknown parameters were considered for the distributed consensus control for networked Euler–Lagrange systems in Ref. [13]. To handle the uncertainties, the authors in Ref. [14] designed a distributed consensus algorithm for the first-order systems with unknown bounded disturbances under an undirected graph. Due to the long distance between agents and the time for data-processing in each agent, communication delays always exist in practice. Considering the input and communication delays, Tian et al.[15] designed the decentralized consensus algorithms for the linear systems under undirected and directed graphs, in which the condition of system consensus is dependent on input delays but independent of communication delays. The distributed consensus problem under the undirected graph with communication delays was investigated in Ref. [16] for the networked linear systems.
Summarizing the above results, we can conclude that the consensus control algorithms proposed in Refs. [5]–[10], [12]–[16] are all continuous, which means that the energy for the control system should be provided all the time. However, the energy carried in each system is usually limited.[17,18] Besides, in the studies of Refs. [5]–[10], [12]–[16], the information interaction among agents is always required, which increases the energy consumption and communication burden.
To lower the energy consumption and communication burden in the distributed control of MAS, some researchers proposed the impulsive control for the distributed control problem. In Ref. [19], an impulsive consensus control algorithm was proposed for the networked first-order linear MAS under a directed graph. The authors in Ref. [20] extended the results in Ref. [19] to the networked second-order linear MAS. In Ref. [21], the heterogeneous communication delays among agents were further considered for the distributed consensus problem for the networked second-order linear MAS via impulsive control method. However, in the above references,[19–21] the system model is linear. Tang et al.[22] researched the leader-following impulsive consensus control problem for the networked nonlinear MAS with communication delays. In Ref. [23], the distributed impulsive consensus control algorithm was designed for the networked Euler–Lagrange systems. The authors in Ref. [24] extended the results in Ref. [23] to the case with probabilistic communication delays. However, the model parameters of the Euler–Lagrange systems need to be known for the distributed consensus controller designed in Refs. [23] and [24].
The consensus theory in multi-agent systems can be used as a powerful tool to solve the cooperative formation problem where the cooperative formation control algorithm for each agent is designed such that all agents keep relative distance or attitude. Based on the overview of the above references,[1–22] this paper studies the cooperative impulsive formation control problem for the networked Euler–Lagrange systems under a directed graph. The networked Euler–Lagrange systems are subjected to uncertain dynamics, external disturbances, and communication delays. Moreover, the information interactions of each agent with its neighbors are only at some discrete moments. The proposed cooperative formation algorithms are independent of the system model.
Compared with the previous results on cooperative continuous consensus control[5–10,12–16] and distributed impulsive consensus control,[19–24] this study mainly has three advantages.
(i) The cooperative impulsive formation control is investigated for the networked MAS. In comparison to the distributed continuous consensus control algorithm,[5–10,12,13,15,16,16] the energy consumption and the communication burden are reduced.
(ii) Each agent is modeled by nonlinear Euler–Lagrange equation, which can be used to represent a large class of practical mechanical systems. In comparison to the linear systems,[5,6,14,15] it is more challenging to design a cooperative formation control algorithm for a nonlinear Euler–Lagrange system. Furthermore, the uncertain dynamics and external disturbances are considered. Compared with Refs. [23] and [24], the proposed cooperative formation algorithms are independent on the system model.
(iii) The information interactions are more constrained. The communication delays between agents are considered, while in Refs. [5]–[10] and [12]–[14], the proposed algorithm cannot handle the case with communication delays. The information interactions among each agent and its neighbors are only at some sampling moments, while in Refs. [20]–[23], the information interactions of each agent with its neighbors are continuously required.
2. Problem formulation and preliminariesIn this section, the Euler–Lagrange system, the graph theory and the problem description are introduced.
2.1. Euler–Lagrange systemThe dynamic system of each agent in this study is modeled by the following nonlinear second-order Euler–Lagrange equation
where
i denotes the index of the agents,

is the vector of generalized coordinates with
p degrees of freedom.
is the symmetric positive-definite inertia matrix.
is the vector of Coriolis and centrifugal matrix.

denotes the vector of gravitational forces.

is the vector of the generalized control forces.

represents the external disturbance. For the existence of uncertain dynamics in practice,

,

, and

are all considered as unknown for the controller design in this study. For simplicity,

,

, and

are denoted as

,

, and

in the following statements.
Many mechanical systems can be modeled by the Euler–Lagrange equation and the following common properties are satisfied in this study:
2.3. Problem descriptionThe networked MAS are composed of N agents (denoted as
 ), which are modeled by EL equations (1). The information interaction among N agents is a directed graph GA with the Laplacian matrix L. The control objective of this study is to design a cooperative impulsive control algorithm for each agent such that all agents reach a formation. The formation is said to be achieved if the following condition holds
), which are modeled by EL equations (1). The information interaction among N agents is a directed graph GA with the Laplacian matrix L. The control objective of this study is to design a cooperative impulsive control algorithm for each agent such that all agents reach a formation. The formation is said to be achieved if the following condition holds
where
δij is the desired relative distance or attitude between agent
i and
j in formation problem. If the directed graph among all agents is strongly connected,
δij can be decomposed as

. Then, the following Lemma in multi-agent systems is given to build a relationship among the graph, Laplacian potential and system formation.
3. Main resultsIn this section, the cooperative impulsive formation control algorithms for the networked Euler–Lagrange systems without and with communication delays are investigated respectively. The neural-networks approximation and adaptive technique are used to handle the system uncertain dynamics and external disturbances. The Lyapunov stability theory and Laplacian potential function in graph theory are used to prove the convergence of the system formation.
3.1. Cooperative impulsive formation control without communication delaysIn this subsection, a cooperative impulsive formation control algorithm is designed for the networked Euler–Lagrange systems without communication delays. Firstly, the directed information interaction graph GA satisfies the following assumption.
First, the auxiliary variables are designed
where
ρ is a positive constant. Applying Eq. (
7) into Eq. (
1), we can obtain
where

is the uncertain nonlinear dynamics. The neural-networks are used to approximate for the uncertain dynamics in the following form
where
Wi is the ideal constant approximation weight matrix,

is the suitable basis set of functions, and

is the approximation error of neural-networks which is assumed to be bounded by

, where

is a positive constant. However, the ideal constant weight matrix
Wi are usually unknown for the controller design and the uncertain dynamics cannot be approximated exactly by the neural-networks. Thus, the estimate of

can be written as
where

is the estimate of
Wi and the adaptive law for

will be given later. In the following statements,

is simplified as

.
Then, we propose the following cooperative impulsive formation control algorithm
where

,

,

,
α,

are positive constants,

is the

-th entry of the adjacency matrix
A of the directed graph
GA, and

denotes the impulsive effects at the moment

. In this study, we assume that the time moments

are strictly increasing in the time interval

, i.e.,
Then, the following theorem is given to solve the impulsive formation control problem for the networked Euler–Lagrange systems.
To further analyze the stability of the proposed cooperative impulsive formation control algorithm for the networked Euler–Lagrange systems, the following four proof steps are given. Steps 1 and 2 are given to prove the asymptotic convergence of the networked systems when
 . Step 3 is to analyze the relationship of system variables when
. Step 3 is to analyze the relationship of system variables when
 and
and
 . Step 4 is to synthesize the results when
. Step 4 is to synthesize the results when
 and
and
 and conclude the global stability.
and conclude the global stability.
Combining Eqs. (34) and (42), we can obtain
According to the average impulsive interval definition in Ref. [29], we have
where

denotes the number of the impulsive times of impulsive sequence

in time interval

,
ψ is the minimum average impulsive interval, and
N0 is a positive integer. Thus, we can obtain
Using Eq. (18), we conclude that
To get the formation of the networked systems, we consider the Laplacian potential function
where

,
Q are defined in Definition
1.
Because the information interaction graph GA among agents is strongly connected, we can obtain
 by Lemma 1. Therefore, we have a relationship between the Laplacian potential function
by Lemma 1. Therefore, we have a relationship between the Laplacian potential function
 and the Lyapunov function
and the Lyapunov function
 .
.
Combining Eqs. (46), (47), and (48), we conclude that
According to Lemma 2, equation (49) implies
According to Eq. (7), we obtain
Because

is constant, we have
Because

, we can gain
and
According to Eq. (50), we can conclude that
which implies the formation of the networked Euler–Lagrange systems is achieved. This completes the proof.
3.2. Cooperative impulsive formation control with communication delaysIn this subsection, the communication delays among agents are considered in the networked Euler–Lagrange systems. Since the main procedures of this subsection are similar with the former subsection, the differences are mainly stated here.
To analyze the stability of the networked systems with delays, the following Lemma is given firstly.
Then there exists a constant
 such that
such that
where

.
The cooperative impulsive formation control algorithm for the networked systems with communication delays is designed as Eqs. (12), (14), and
where
T represents the communication delays between agents.
When
 , the closed-loop networked systems can be written as
, the closed-loop networked systems can be written as
Integrating both sides of Eq. (57), we have
where

,

.

but

. Then, we have
The Lyapunov function
 can be written as
can be written as
According to the inequality
 , we obtain that there exists a constant
, we obtain that there exists a constant
 such that
such that
Thus, equation (60) can be written as
where
Thus, we have
Let
 ,
,
 is continuous for any
is continuous for any
 . Using Lemma 3, we can obtain if the following conditions hold
. Using Lemma 3, we can obtain if the following conditions hold
then, we have
where

and

.
By simplifying, inequalities (65) and (66) can be further written as
By the similar proof procedures in Step 4 in Subsection 1 which is omitted here, we can conclude that the formation of the networked Euler–Lagrange systems with communication delays is achieved. This completes the proof.
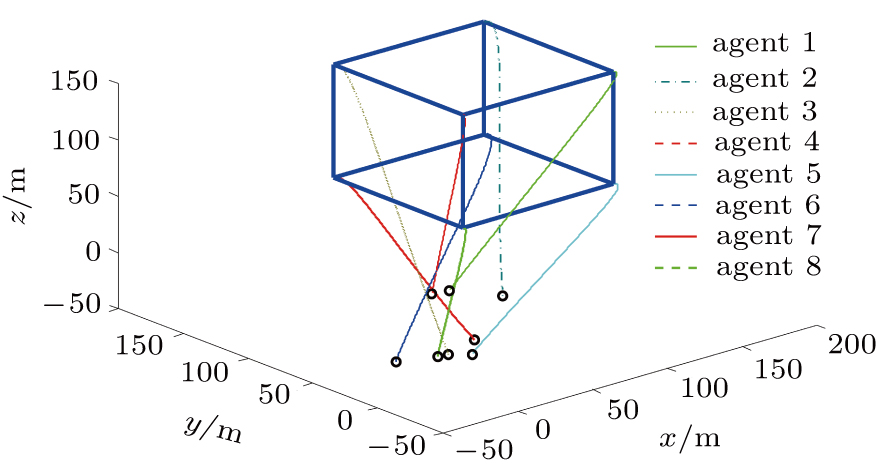
4. Illustrative exampleIn this section, a numerical simulation of satellite formation flying is presented to verify the effectiveness of the proposed cooperative impulsive formation control algorithms.
Consider a group of eight satellites (
 ), the equations of relative orbit motion in the local-vertical, local-horizontal (LVLH) rotating frame can be described as[31]
), the equations of relative orbit motion in the local-vertical, local-horizontal (LVLH) rotating frame can be described as[31]
where

are the relative coordinate of the satellite
i in the LVLH frame,
R0 is the orbit radius,
mi is the mass of the satellite,
μe is the gravitation constant,
is the orbit angular velocity,
Ri is the distance between the satellite and the geocenter,

are the control forces. Note that the above relative orbit motion equations can be transformed into Euler–Lagrange equation

,

by
,
,
This simulation’s examples assume that the relative orbit reference of the satellite formation system follows a near-circular orbit with the initial orbit elements
where
a is the semi-major axis (in unit km) of the reference orbit,
e is eccentricity,
i is the inclination,

is the longitude of the ascending node,
ϖ is argument of periapsis, and
f is the true anomaly. For satellites
i = {1,2,3},

and
i = {4,5,6,7,8},

.
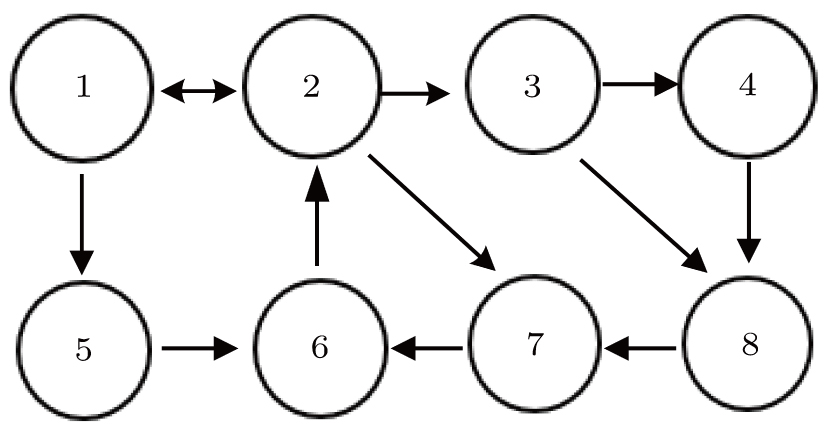
The connected directed communication topology GA among eight satellites is described in Fig. 1.
The Laplacian matrix of the directed graph GA is
The initial states of eight satellites are

,

,

,

,

,

,

,

,

,

.

,

,

,

,

,

,

.
The simulation parameters of neural-networks (NN) are given as: the activation function of NN for i-th satellite used in this simulation can be denoted as
where

is a Gaussian function
where
. It is assumed that all the activation function of neural-networks is the same,
cij represents the center of the receptive field which is evenly distributed in

.

is the width of Gaussian function. The initial weight matrix are all zeros, which denoted

.
The control parameters are ρ = 0.01,
 ,
,
 ,
,
 , α = 0.5,
, α = 0.5,
 ,
,
 . Communication delays are set as T = 1 s. The impulsive intervals are 5 s, i.e.,
. Communication delays are set as T = 1 s. The impulsive intervals are 5 s, i.e.,
 s,
s,
 . Note that the above chosen control parameters satisfy the conditions (15)–(18), (68) and (69).
. Note that the above chosen control parameters satisfy the conditions (15)–(18), (68) and (69).
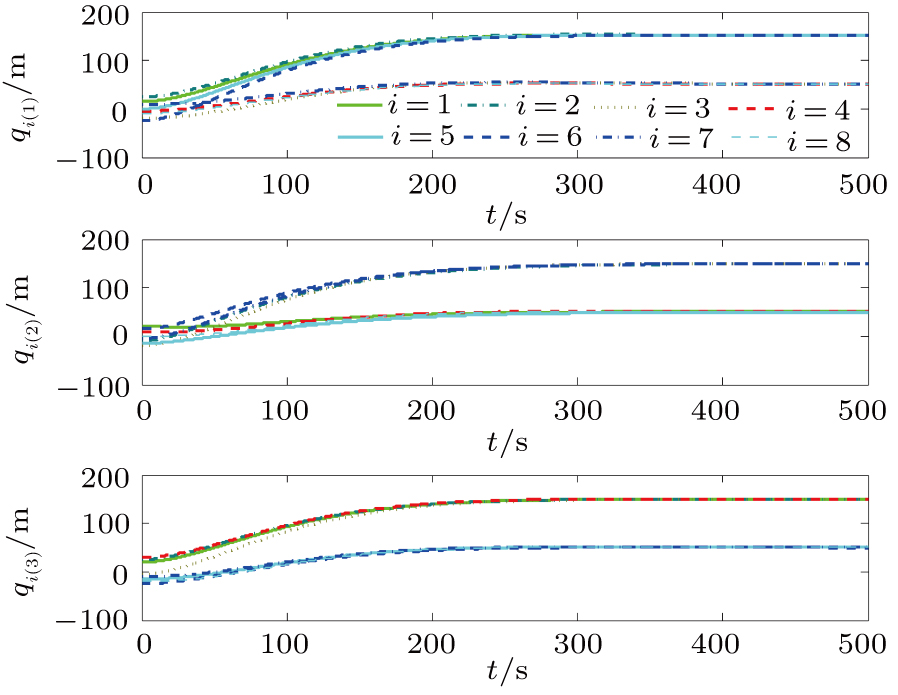
The simulation results are shown below and the figures are drawn in Figs. 2–13.
To compare the control energy consumption among Case 1, Case 2, and Case 3, the control energy consumption for the networked systems is defined as
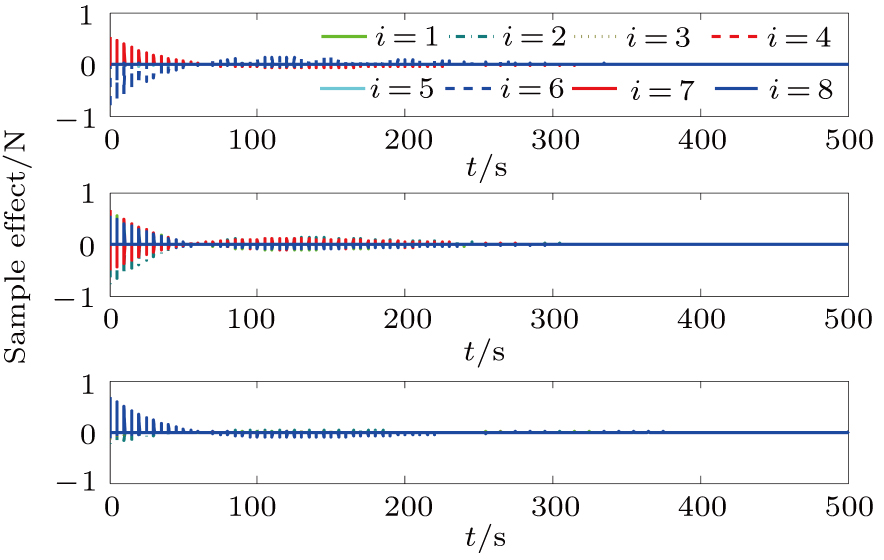
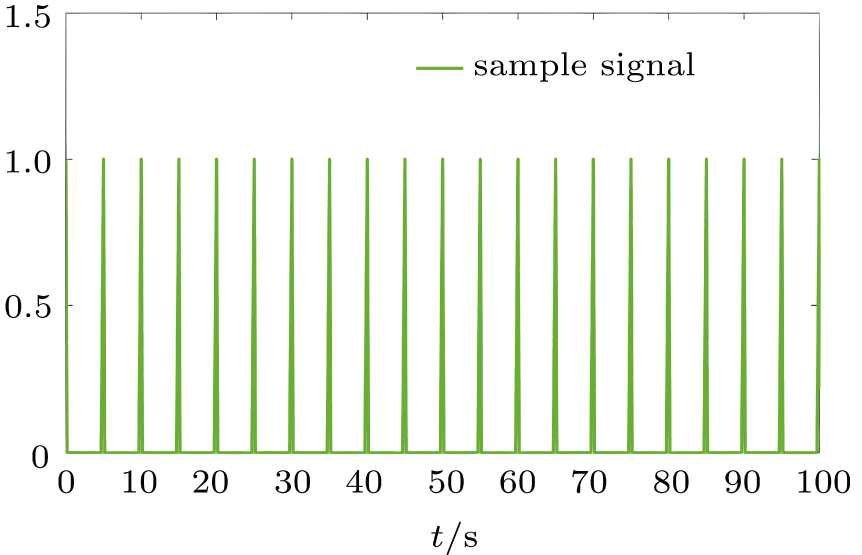
To analyze the impulsive effect on system performance, the figures of sample signal and impulsive effect in Case 1 are given below.
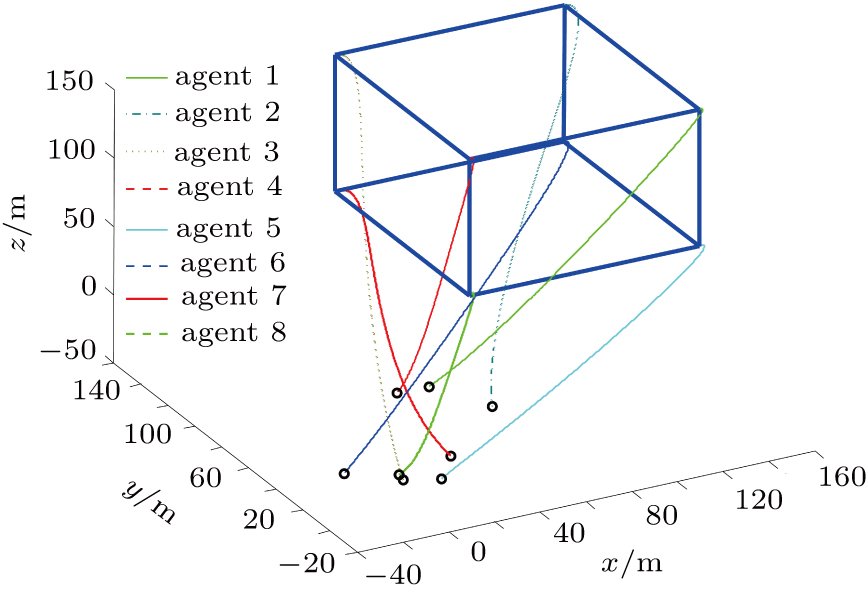
We can see that the square formation of eight satellites is achieved in the above three simulation examples. Comparing Figs. 4, 7, and 10, we can obtain that the impulsive controller is discontinuous with some impulsive effect at the sample moments. From Fig. 11, we can conclude that the impulsive controller without communication delays has the least control energy consumption, the impulsive controller with communication delays is the second mainly because of the cost for the communication delays. The continuous controller has the most control energy consumption, which proves the effectiveness of reducing control energy consumption with the impulsive controller. Figure 12 gives the sample period moments within 100 s. Figure 13 gives the impulsive effect in Eq. (13), which shows that the impulsive effect will converge to the origin finally.
To sum up, the simulation results in Figs. 12 and 13 illustrate the effectiveness of the proposed cooperative impulsive formation control algorithms. The comparison in Fig. 11 proves less energy consumption of impulsive formation algorithm than the continuous formation algorithm.
5. ConclusionThe paper focuses on the cooperative impulsive formation control problem for a class of networked Euler–Lagrange systems with uncertain dynamics and external disturbances under a connected directed graph. Furthermore, the communication delays among agents are considered. The main features of the proposed impulsive formation control algorithms are that the controllers are impulsive and the information interactions among agents are only at some discrete moments, which reduce the energy consumption and the communication frequency among agents. To handle the uncertain dynamics in the networked systems, neural-networks approximation and adaptive technique are used to compensate for the unknown nonlinear dynamics. With the proposed impulsive formation control algorithm, all agents converge to the desired formation. With the consideration of communication delays, the modified impulsive formation control algorithm is proposed. Finally, the simulation examples are presented to demonstrate the effectiveness of the proposed impulsive formation control laws and the performance improvements of impulsive formation control law upon the continuous formation control law. Future work will concentrate on the distributed impulsive leader-following formation problem with communication delays.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}