


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Bow shocks formed by a high-speed laser-driven plasma cloud interacting with a cylinder obstacle
Cite this Article
Li Yan-Fei, Li Yu-Tong, Yuan Da-Wei, Fang Li, Zhu Bao-Jun, Zhang Zhe, Zhong Jia-Yong, Bo Han, Wei Hui-Gang, Pei Xiao-Xing, Zhao Jia-Rui, Liu Chang, Yuan Xiao-Xia, Liao Guo-Qian, Rhee Yong-Joo, Lu Xin, Hua Neng, Zhu Bao-Qiang, Zhu Jian-Qiang, Fang Zhi-Heng, Huang Xiu-Guang, Fu Si-Zu, Gang Zhao, Zhang Jie. Bow shocks formed by a high-speed laser-driven plasma cloud interacting with a cylinder obstacle
. Chinese Physics B, 2017, 26(5): 055202 
Permissions
Bow shocks formed by a high-speed laser-driven plasma cloud interacting with a cylinder obstacle
† Corresponding author. E-mail:
Abstract
A bow shock is formed in the interaction of a high-speed laser-driven plasma cloud with a cylinder obstacle. Its temporal and spatial structures are observed by shadowgraphy and interferometry. The width of the shock transition region is ∼ 50 μm, comparable to the ion–ion collision mean free path, which indicates that collision is dominated in the shock probably. The Mach-number of the ablating plasma cloud is ∼ 15 at first, and decreases with time resulting in a changing shock structure. A two-dimension hydrodynamics code, USim, is used to simulate the interaction process. The simulated shocks can well reproduce the observed.
1. Introduction
Because of the numerous supersonic objects and the ubiquitous media in astronomical environments, there exist various shocks in the universe widely. Shocks can be generated when a jet propagates in clouds of gas and dust,[1,2] or when a moving cloud collides with an object, for example, when the solar wind interacts with a planet such as the Earth,[3–6] Mars,[7,8] or Venus.[9] Shocks are important to understand many astrophysical phenomena. It is suggested that charged particles are accelerated at the shock front,[10,11] from which energetic cosmic rays are originated. However, it is very difficult to directly detect the astrophysical shocks by spacecraft, especially for those outside the solar system. Thus their generation mechanisms and evolution processes are not well understood, even with the help of computer simulations.[12–14] Thanks to the development of high-power laser technology, the extreme conditions produced by intense lasers[15,16] make it possible to simulate some astrophysical environments in the laboratory.[17–26] With the similarity criteria,[27,28] which could scale laboratory systems to the astrophysical ones, some laser-driven experiments have been performed to study astrophysical shocks.[2,25,26,29] In most of those experiments, shocks are excited by using the interactions between two ablating plasmas, or between a plasma jet and a gas medium. In Ref. [30], a relatively long-lived collisionless shock is generated by the collision of a plasma plume ejected from the front surface of a planar carbon target with a spherical carbon obstacle. An observed density jump suggests the formation of a bow shock. The Mach-number of the shock is ∼2.2, which is relatively low compared to those in most astrophysical situations.
In this paper we will present the generation and evolution of a bow shock with a higher Mach-number by using a fast plasma cloud ejected from the rear of a planar CH foil colliding with a cylinder obstacle. In our experiment the bow shock is observed with shadowgraphy and interferometry. The width of the shock transition region is ×50 μm, which is similar to the ion–ion collision mean free path. Thus the shock is probably excited mainly due to ion–ion collision. The Mach-number of the ablating plasma cloud is as high as 15 at an early stage. A two-dimension hydrodynamics code, USim, is used to simulate the interaction process.
2. Experimental setup
The experiments were carried out on the Shenguang II (SG II) laser facility at the National Laboratory on High Power Lasers and Physics. The experimental setup and target configuration are schematically shown in Fig. 



 | Fig. 1. (color online) Schematic view of the experimental setup. Four 240 J, 1 ns, 0.351 μm laser beams were incident on the surface of a 
|
3. Results and discussion
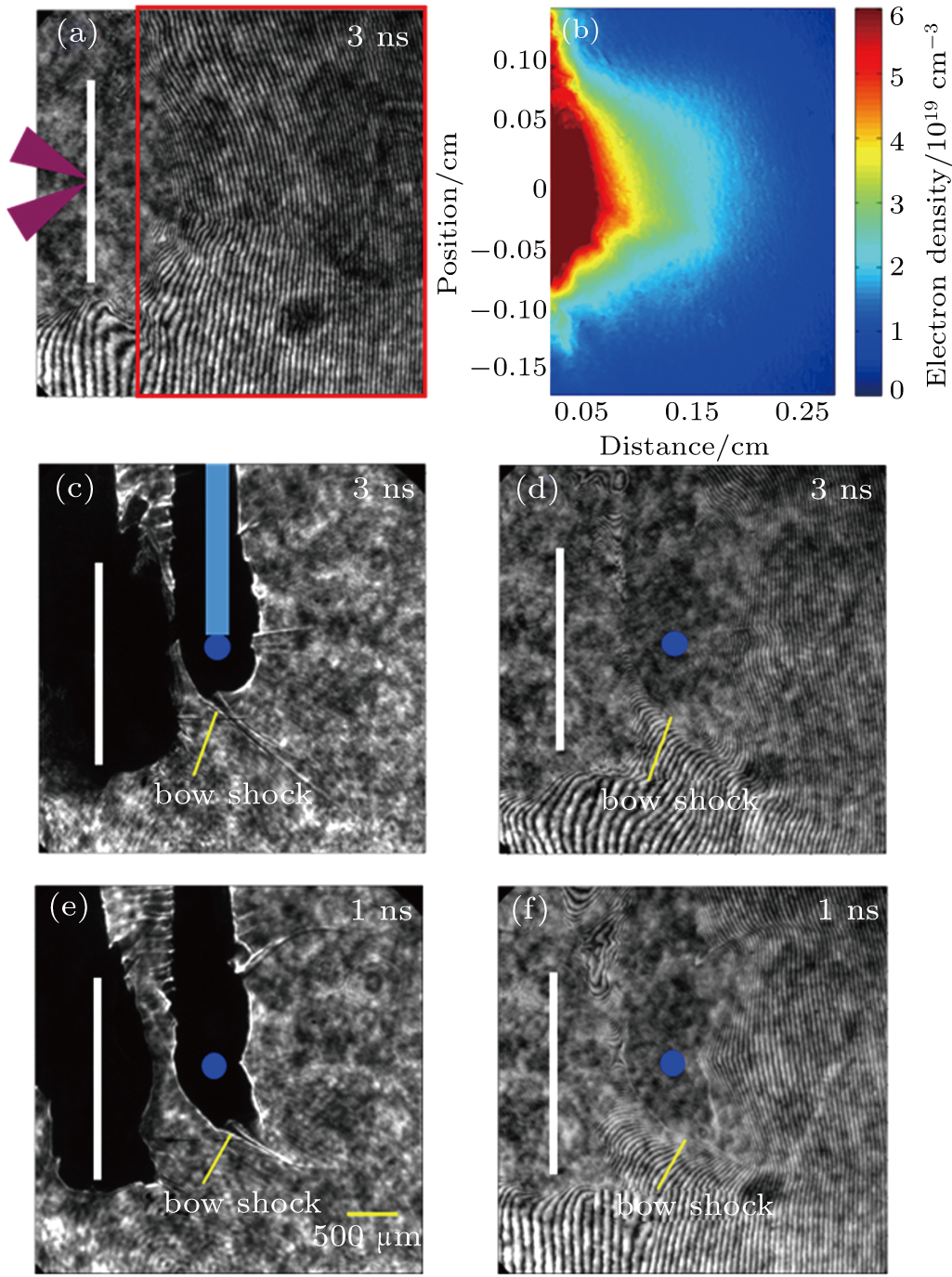
The plasma cloud behind the CH target without the obstacle was characterized firstly. Figures 
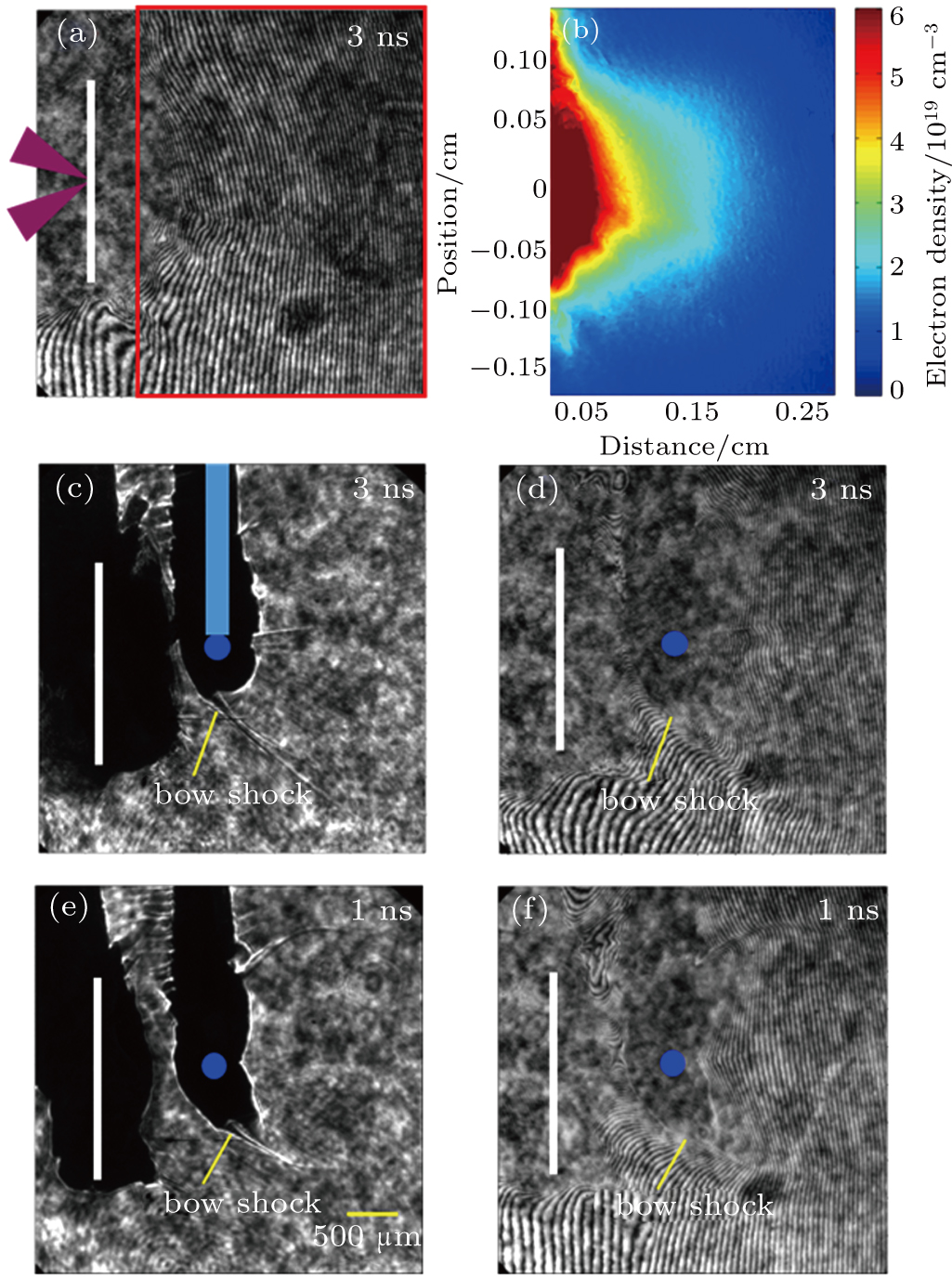 | Fig. 2. (color online) (a) Interferogram of the plasma cloud without the obstacle, taken at a delay time of 3 ns. The purple arrows represent the main laser pulses. The white line indicates the original position of the CH planar target. (b) Abel inverted density map of the red box region in panel (a). (c) Shadowgraph and (d) interferogram taken at the delay time of 3 ns with the obstacle. (e) Shadowgraph and (f) interferogram taken at the delay time of 1 ns with the obstacle. The blue solid circle indicates the cross section of the obstacle. |
Figures
Figures 
The soft x-ray spectrum in the wavelength range 20–50 Å was measured with a grazing-incidence spectrometer. Figure 
 | Fig. 3. (color online) (a) The characteristic spectral lines obtained by the grazing-incidence spectrometer. (b) Comparison between experimental result and simulated results from 30 Å to 44 Å. |
We have used the USim, a two-dimension hydrodynamics code based on Euler equations, to simulate the interaction of the plasma cloud with the obstacle. The cylinder obstacle is set as a circle solid disk immersed in the cloud flow in the simulations. The diameter of the circle disk is set as 500 μm, which is the same as the size of the ionized obstacle measured in the experiment. The plasma cloud moves in from the left boundary of the simulation space. The boundary conditions of the space are absorptive. The cloud is reflected when interacting with the circle disk. We also used the same initial values of the thermal pressure and density of the cloud as the experiment. The whole process is assumed to be adiabatic, that is, the polytropic index 
Figure
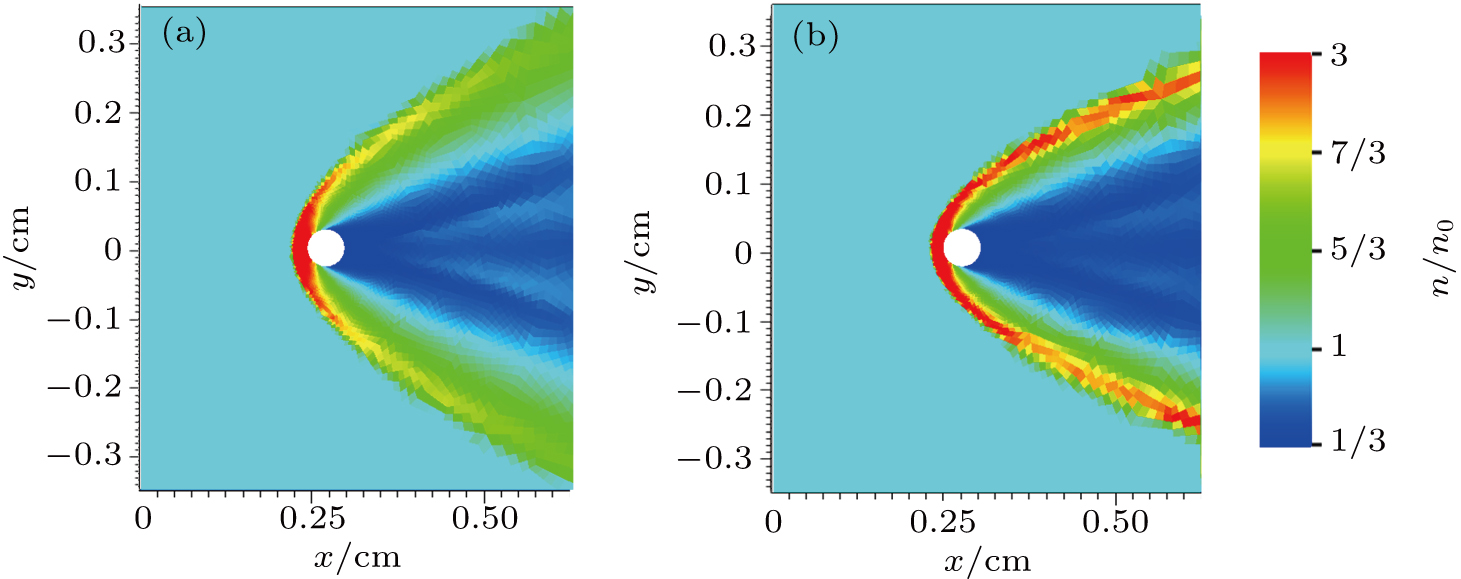 | Fig. 4. (color online) Simulated bow shock structures by the USim at (a) 3 ns and (b) 1 ns, respectively. |
Previous work demonstrates a collisionless shock in the interaction of a plasma plume with an obstacle.[30] Collisionless shocks are typically mediated by electrostatic or electromagnetic instabilities. For the electrostatic case, the maximum Mach number is determined by 







To figure out that the shock we observed is collision-dominated or collisionless-dominated, we have calculated the ion–ion collision mean free path 








4. Conclusion
A bow shock is demonstrated in the interaction of a high Mach-number, laser-driven plasma cloud with a cylinder obstacle on the SG II laser facility. The width of the shock transition region observed by the shadowgraphy and interferometry is ∼ 50 μm, which is comparable to the ion–ion collision mean free path. This indicates that the shock is mainly collisional probably. The Mach-number of the shock is measured to be ∼ 15 at an early stage, and decreases with time. This leads to the change of the bow shock shape. Our results indicate the possibility of investigating shocks relevant to astrophysics through similarity criteria in the laboratory.
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] | |
| [21] | |
| [22] | |
| [23] | |
| [24] | |
| [25] | |
| [26] | |
| [27] | |
| [28] | |
| [29] | |
| [30] | |
| [31] | |
| [32] | |
| [33] | |
| [34] | |
| [35] |