














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Noninvasive treatment efficacy monitoring and dose control for high-intensity focused ultrasound therapy using relative electrical impedance variation
Cite this Article
Su Huidan, Guo Gepu, Ma Qingyu, Tu Juan, Zhang Dong. Noninvasive treatment efficacy monitoring and dose control for high-intensity focused ultrasound therapy using relative electrical impedance variation. Chinese Physics B, 2017, 26(5): 054302 
Permissions
Noninvasive treatment efficacy monitoring and dose control for high-intensity focused ultrasound therapy using relative electrical impedance variation
† Corresponding author. E-mail:
Abstract
As an effective therapeutic modality, high-intensity focused ultrasound (HIFU) can destroy tumour tissues by thermocoagulation with less metastasis, but it is still limited by inaccurate non-invasive temperature monitoring and efficacy evaluation. A model of electrical impedance measurement during HIFU therapy was established using the temperature-impedance relationship. Based on the simulations of acoustic pressure, temperature, and electrical conductivity, the impedance of the phantom was calculated and experimentally demonstrated for different values of acoustic power values and treatment time. We proved that the relative impedance variation (RIV) increases linearly with the increasing treatment time at a fixed acoustic power, and the relative impedance variation rate shows a linear relationship with the acoustic power. The RIV and treatment time required for HIFU treatment efficacy are inversely proportional to the acoustic power and the square of acoustic power, respectively. The favourable results suggest that RIV can be used as an efficient indicator for noninvasive temperature monitoring and efficacy evaluation and may provide new strategy for accurate dose control of HIFU therapy.
Keyword:high-intensity focused ultrasound (HIFU) therapy;relative electrical impedance variation;temperature-impedance relation;efficacy evaluation
1. Introduction
High-intensity focused ultrasound (HIFU)[1–6] can converge sound wave to the focal area, raise temperature and destroy tumour cells by thermocoagulation necrosis in a short time. HIFU therapy, which has the advantages[7] of non-invasiveness, little trauma, rapid recovery and less metastasis, is considered as one of the most promising technologies for tumour treatment in the 21
Although the temperature inside the body can be predicted based on the heat radiation from body surface, the application of infrared temperature measurement technology is still limited by short penetration depth and poor measurement accuracy. Temperature image can be reconstructed by magnetic resonance imaging[8–10] (MRI), which is based on the measurements of temperature-dependent diffusion coefficient, proton resonance frequency, or relaxation time without ionizing radiation. However, the application of MRI is limited because of its poor temporal resolution and high cost. During the past decades, several ultrasonic measurement technologies[11–13] have been proposed to be integrated into HIFU system. Based on the measurements of echo time shift and nonlinear distortion, temperature estimation has been performed using variations of acoustic velocity, impedance and nonlinear parameters. Since temperature dependent variations of these acoustic parameters were relatively small, the accuracy of temperature measurements was unsatisfactory for biomedical applications. In addition, even though ultrasound imaging[14] can be used to guide HIFU location and monitor blood flow, and quantitative ultrasound imaging[15] has a potential for use in non-invasive monitoring of HIFU exposure, it is still insufficient for the precise temperature measurement and efficacy evaluation during HIFU treatment.
It was reported that the electrical conductivity of normal tissues was 0–0.5 S/m[16] at the frequency less than 1 MHz, which was temperature dependent. Griffiths[17] found a nearly linear relationship between the impedance and temperature changes of agar with the temperature-impedance variation factor (TIVF) of about 

In this study, a double-electrode measurement model was established to investigate the relationship among electrical impedance, acoustic power, and treatment time during HIFU therapy, and a method of critical temperature (70 °C) monitoring and efficacy evaluation for thermocoagulation was proposed as well. Based on the temperature–impedance relationship, a 3-D model was established using the finite element method (FEM) to simulate the distributions of acoustic pressure, temperature, and conductivity of a cylinder phantom. Subsequently, the relative electrical impedance variation (RIV) was calculated with simulated distributions of electrical potential and current density. According to the experimental setup, real-time impedances of a cylindrical tissue-mimicking phantom were measured at different acoustic powers and treatment times, and RIVs were calculated and compared with theoretical results. Once HIFU treatment efficacy was achieved with the temperature of focal region (within 
2. Principle and method
where r and z are the radial and axial coordinates, p is the acoustic pressure, ω is the angular frequency, density

and acoustic speed

are complex-valued to account for the damping properties of the media. Using attenuation coefficient α, the wave number in viscous media can be described as

,[24] and then the corresponding density and sound speed can be calculated as

[24] and

,[24] where

and c are the density and sound speed in the media without attenuation.
where

and

are the specific heat and thermal conductivities of tissues, T is the increased temperature, and

is the initial temperature of 20 °C.
where

is treatment duration,

and

are resistive components of the electrical impedances of the phantom before and after therapy, respectively. Meanwhile, when the temperature of the focal region (in radial

mm) reaches 70 °C, irreversible thermocoagulation of tissues takes place and HIFU treatment efficacy is realized. Therefore, the value of RIV of the phantom under this condition can be used as the indicator for critical temperature monitoring and efficacy evaluation, and the corresponding required RIV and treatment time can also be applied for accurate dose control in HIFU therapy.
The schematic diagram of HIFU therapy and electrical impedance measurement system is illustrated in Fig.
 |
 | Fig. 1. (color online) Schematic diagram of HIFU therapy and electrical impedance measurement system with the cross-sectional diagram of the phantom at the focal plane in the upper-left inset. |
In HIFU therapy, the energy deposition[25] (heat source) can be calculated using 




 |
To analyse impedance variation quantitatively, the commonly used temperature-impedance variation factor (







 |
By applying the temperature-conductivity relation in Eq. (






In traditional hyperthermia, thermal dose (TD) was often used to quantitatively evaluate the degree of thermal damage. Sapareto[27] and Meaney[28] pointed out that TD is related to heating time and temperature variation as 



Based on the temperature–conductivity relation, the wide range of conductivity variation can be used for sensitive monitoring of temperature rise and treatment efficacy in tissues. Whereas, since the base electrical impedances of the phantoms having different shapes and sizes are different, the accurate information of conductivity variation or temperature rise in the focal region cannot be achieved with measurements of absolute electrical impedances alone. In order to avoid the influence of absolute impedance of phantom, two parameters of relative electrical impedance variation (RIV) and relative electrical impedance variation rate (RIVR) are defined as
 |
 |
3. Numerical study
As shown in Fig. 
In order to speed up the simulation with appropriate accuracy, the mesh sizes in water and tissue phantom were set to 


| Table 1.
Parameters used in simulations at the temperature of 293 K (20 °C). . |
In order to realize accurate power calibration for simulations in FEM, the experimental displacements of 6.2, 6.7, 7.7, 9.2 and 10.2 nm on the transducer surface were measured with a laser vibrometer (Polytec, OFV-503 and OFV-2570, Polytec Ltd, German) at the output signal amplitudes of 300, 350, 375, 400 and 450 mV. In FEM simulations, the five measured displacements were used as the parameters to calculate the distributions of acoustic pressure and intensity in the focal region. The effective cross-sectional area 



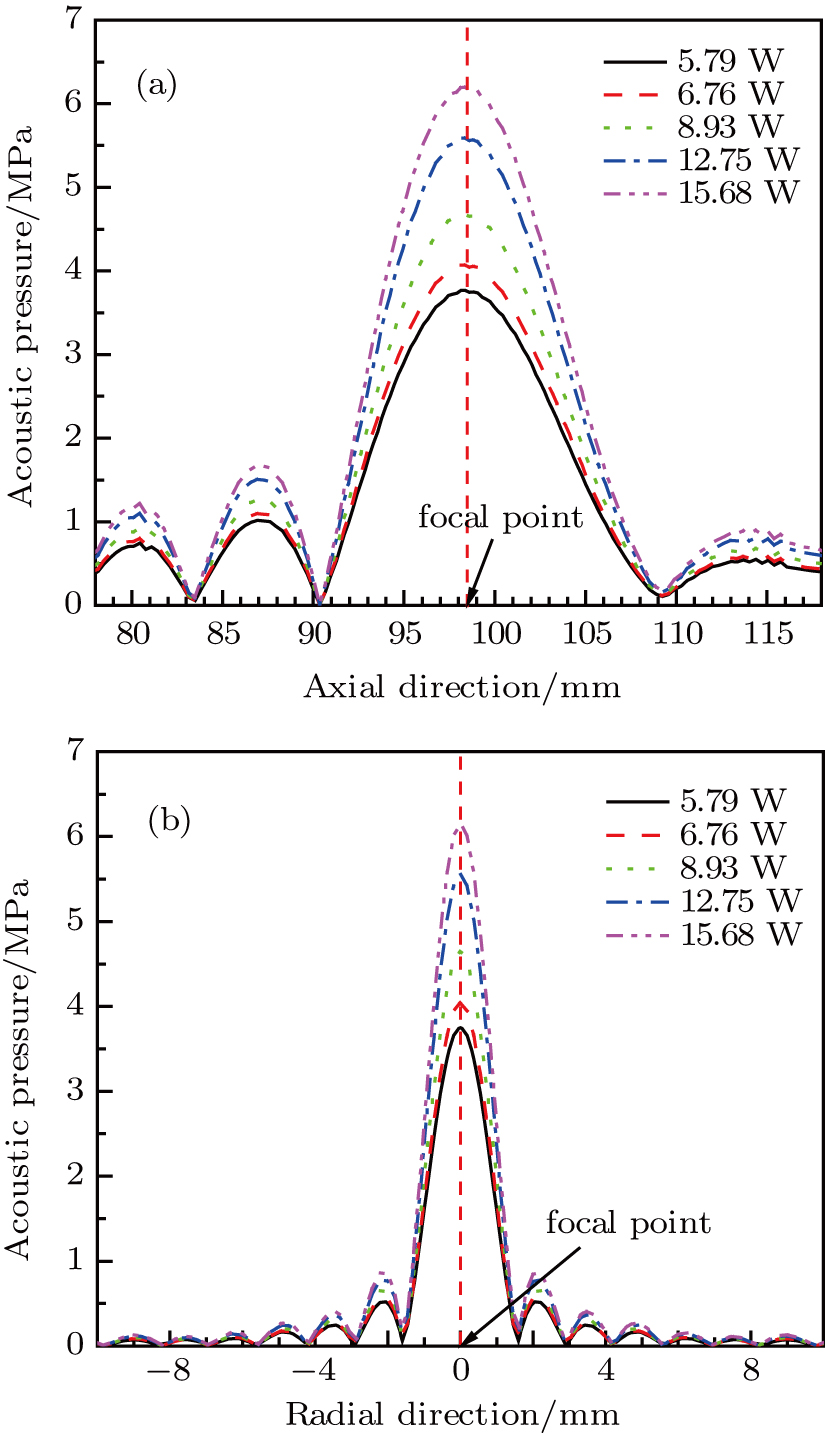
Based on Eq. (
 | Fig. 2. (color online) (a) Axial and (b) radial distributions of acoustic pressure for different values of acoustic power. |
Using Eq. (

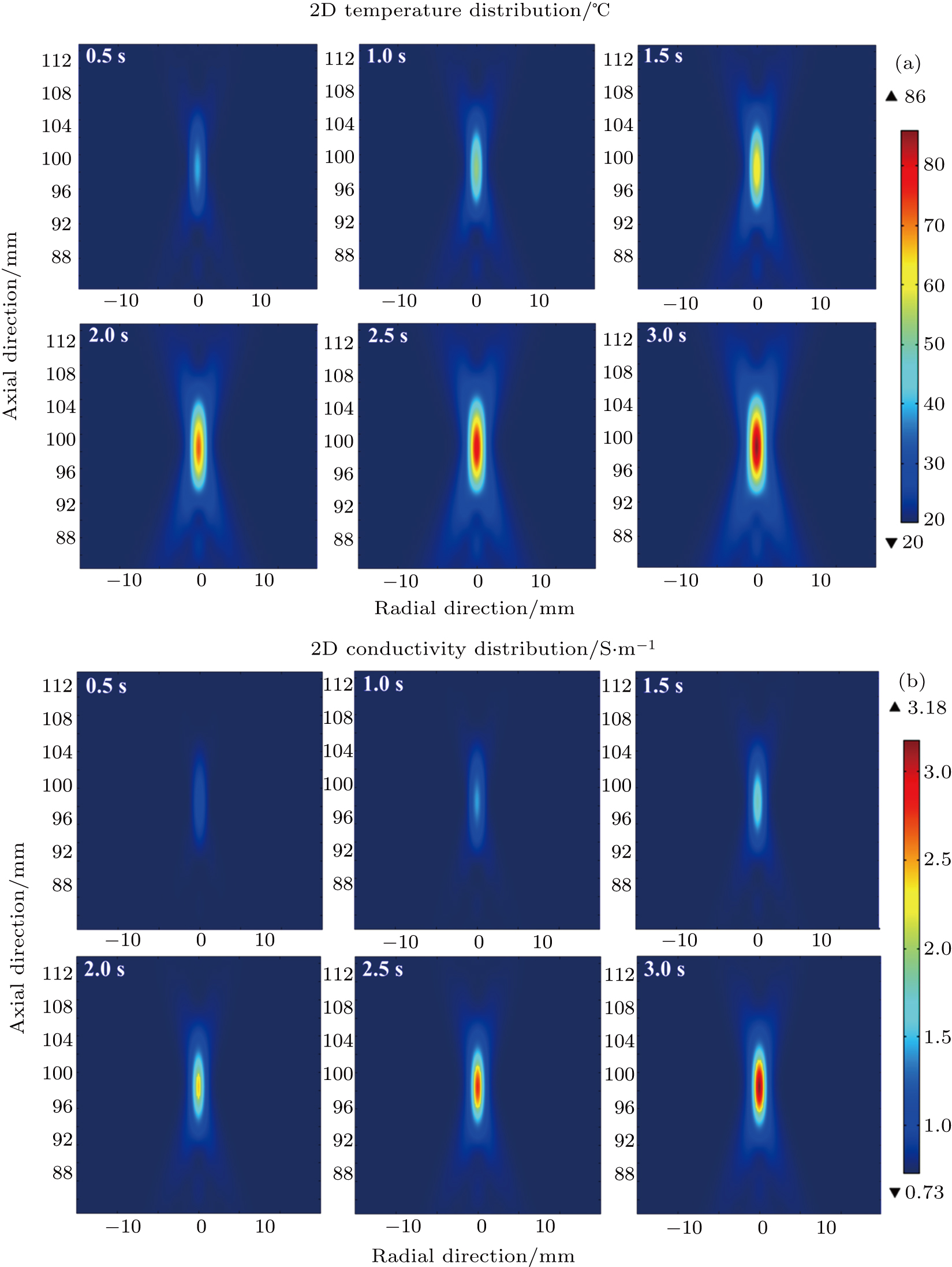 | Fig. 3. (color online) 2D axial profiles of (a) temperature and (b) conductivity in the focal region at various treatment times for the acoustic power of 15.68 W. |
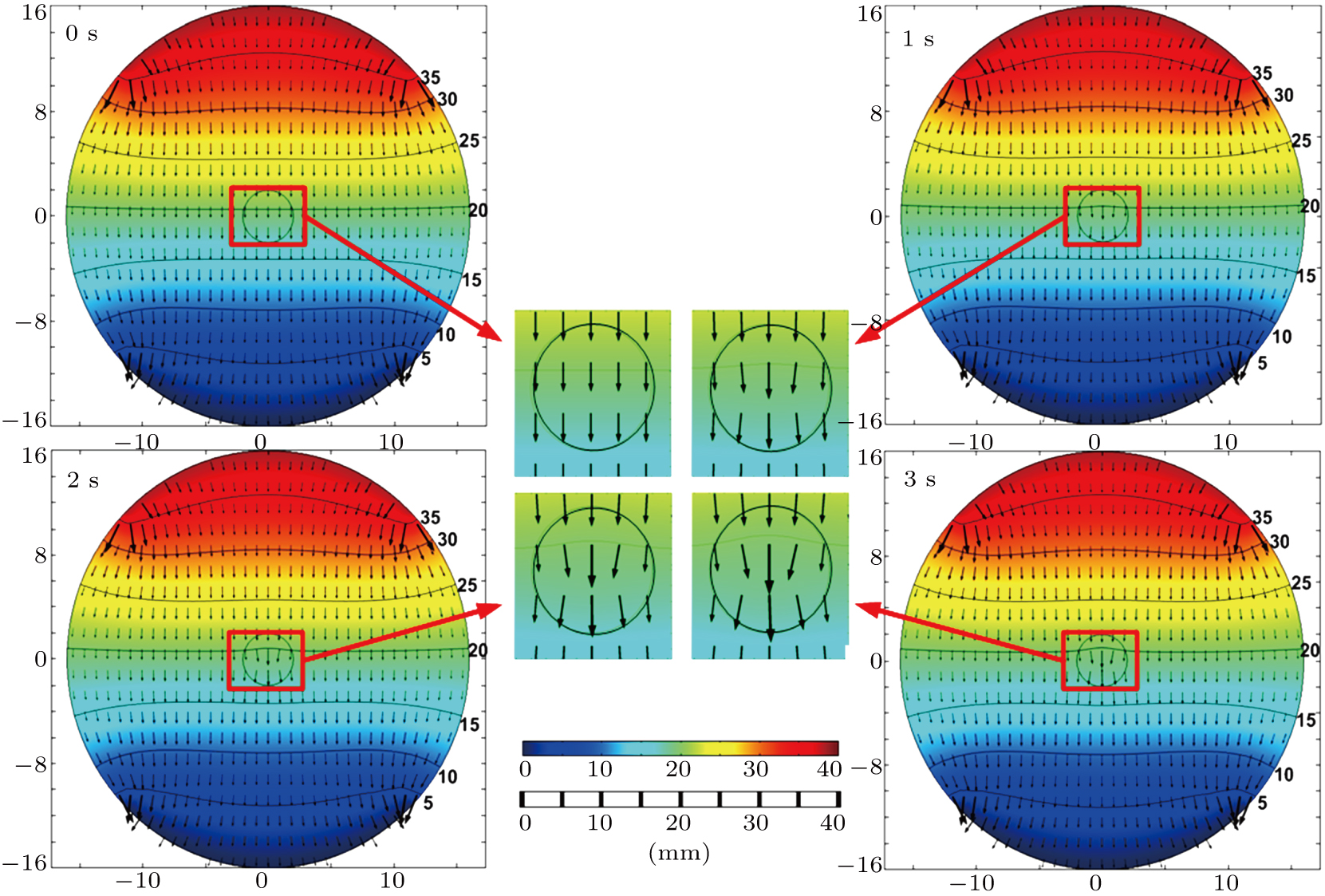
During HIFU therapy, the distribution of electrical field between the two electrodes is impacted by the enhanced electrical conductivity in the focal region, resulting in reduced electrical impedance of the phantom model. By applying the conductivity distributions to the electrical field with constant current injection from the two electrodes, the distributions of electrical potential and current density were simulated in FEM based on the conductivity distributions plotted in Fig.
 | Fig. 4. (color online) Cross-sectional distributions of current density and electrical potential at the focal plane at various treatment times with the acoustic power of 15.68 W. |
Treatment times that are required to reach full HIFU treatment efficacy were calculated to be 21.4, 13.8, 7.0, 3.4, and 2.4 s at acoustic powers of 5.79, 6.76, 8.93, 12.75, and 15.68 W, respectively. The 2D axial profiles of temperature are illustrated in Figs.
 | Fig. 5. (color online) (a) 2D axial temperature profiles and (b) corresponding 1D distributions in the focal region for acoustic power-time combinations required for reaching HIFU efficacy. |
Using the temperature-conductivity relation, 2D axial profiles of electrical conductivity were calculated from the data presented in Fig.
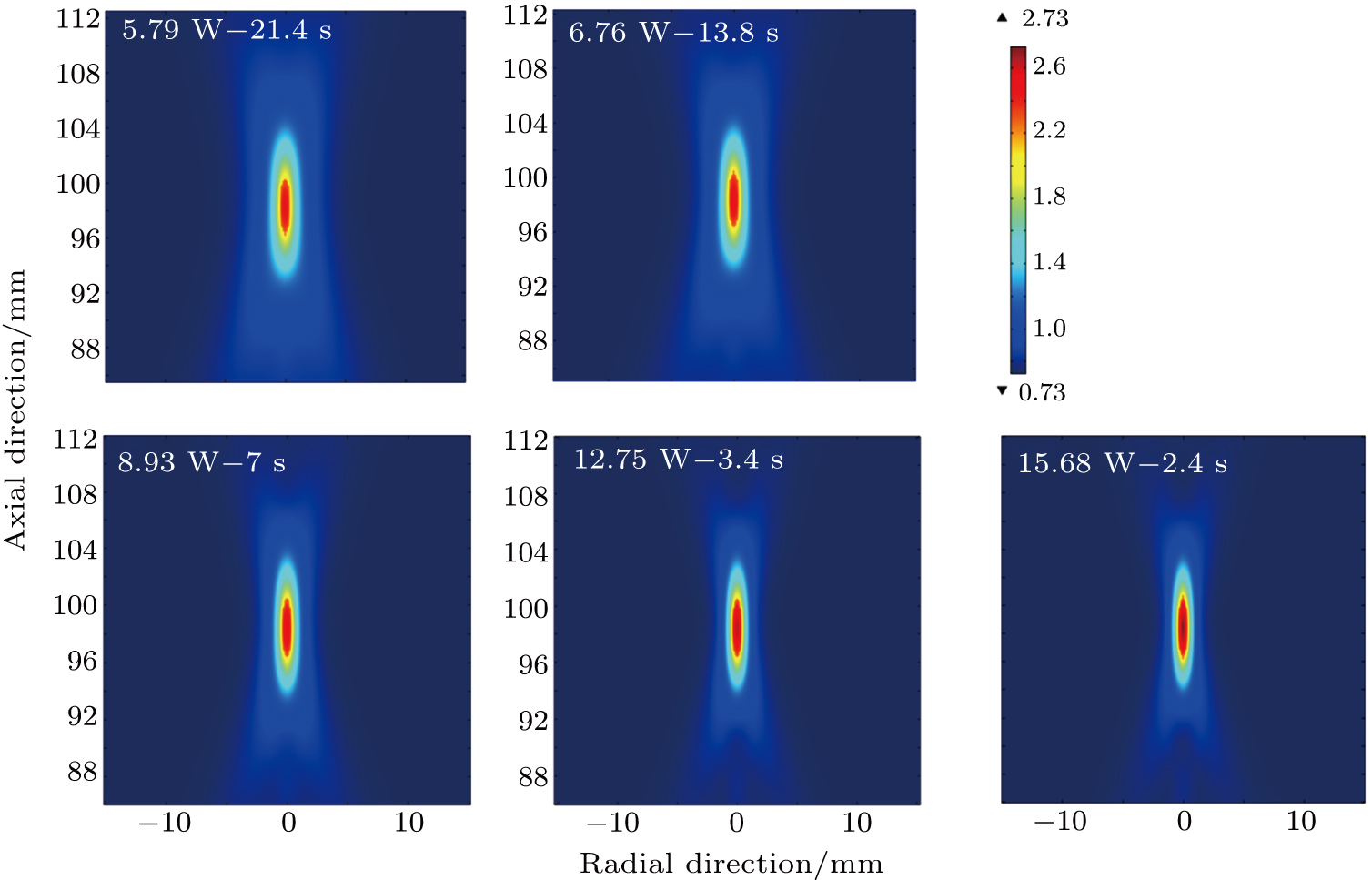 | Fig. 6. (color online) 2D axial profiles of conductivity for acoustic power-treatment time combinations required for reaching HIFU efficacy. |
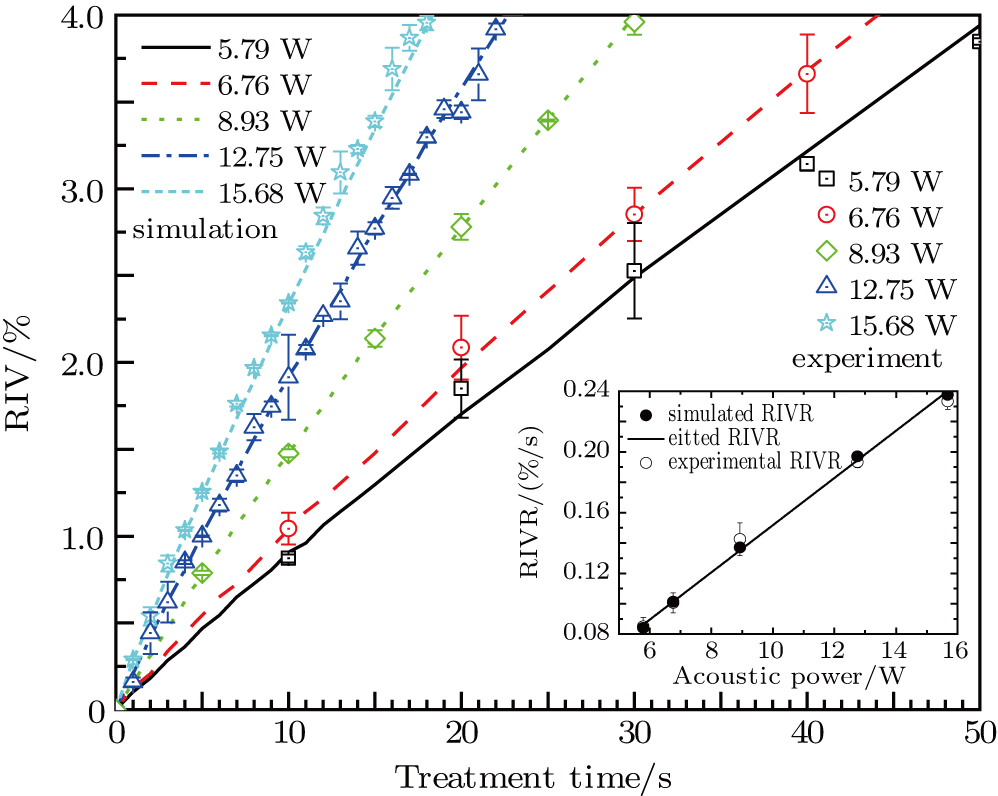
The dependences of RIV on treatment time for different values of acoustic power were calculated based on electrical impedance simulations for the phantom (lines in Fig. 

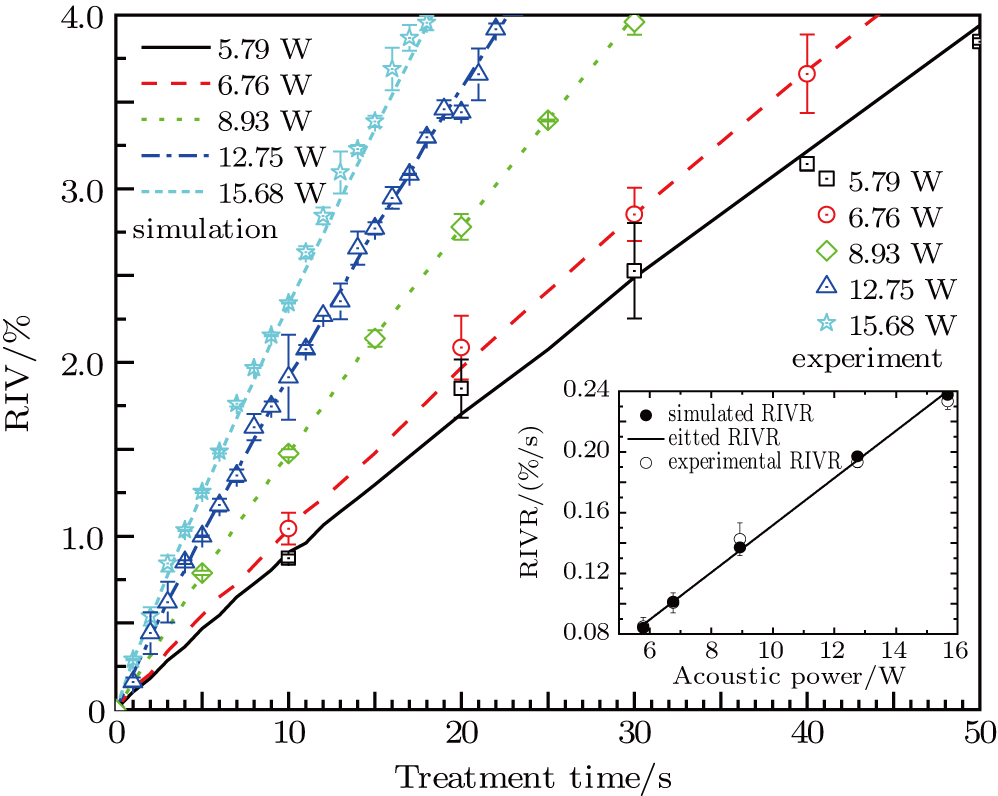 | Fig. 7. (color online) Treatment time dependences of RIV for different acoustic power values and (inset) the relationship between RIVR and acoustic power. |
The dependence of RIV required for reaching HIFU treatment efficacy on acoustic power shows that larger RIV can be generated by expanded focal region using longer treatment time at lower acoustic power (Fig. 



 | Fig. 8. (color online) Acoustic power dependences of required RIV and treatment time to reach HIFU treatment efficacy. |
4. Experimental study
The experimental schematic diagram of HIFU therapy and impedance measurement is illustrated in Fig.
A transparent tissue-mimicking egg white gel phantom[29] was prepared by sol-gel method: 10 g of acrylamide, 0.05 g of ammonium persulfate, 0.3 g of bis-acrylamide and 35 ml of egg white were mixed together and put into 0.9% physiological saline to make 100 ml sol-gel. Then, 0.2 ml of tetramethylethylenediamine was added, the mixture was stirred evenly and poured into the cylindrical acrylic mould for solidification. The physical parameters of the phantom were similar to those of biological tissues. In particular, upon reaching HIFU treatment efficacy, the transparent gel turned into opaque white, which could be used for sensitive indication of thermocoagulation.
In our experiments, HIFU therapy and electrical impedance measurements were conducted on a cylindrical egg white gel phantom by adjusting the amplitudes of output signals at the acoustic power values of 5.79, 6.76, 8.93, 12.75, and 15.68 W. For each acoustic power, the electrical impedances were measured at a fixed time interval, and the experiments were repeated 5 times to obtain data average. The averaged resistive components of the electrical impedances measured at different times at frequencies from 10 kHz to 1 MHz were obtained for RIV calculation. The experimental RIVs for different treatment times and acoustic power values (scattered points in Fig.
Based on linear interpolation for the experimental results in Fig.
5. Discussion
In previous studies of HIFU propagation, the acoustic field was often considered to be nonlinear,[30,31] and the absorption coefficient[32] was dependent on working frequency. The higher frequency field components are absorbed stronger, resulting in additional temperature rise. Meanwhile, it was also demonstrated that the nonlinear acoustothermal effect of HIFU was determined by the configuration and acoustic pressure of the focused transducer. Crum et al.[33] reported that, although the difference between linear and nonlinear estimates of heat rate was substantial for a given HIFU procedure, the difference in temperature prediction was much smaller because of thermal conduction. Based on the investigation of nonlinear effects for focused ultrasound beam, Myers and Soneson[34–36] showed that 





In this study, the principles of the proposed technology of treatment efficacy monitoring and dose control for HIFU therapy are based on the relationship between temperature and electrical impedance of tissues and the significant change in conductivity during tissue thermocoagulation. The RIV of the model can be used to monitor the temperature induced conductivity variation in the focal region. This measurement technology can separate electrical measurement from acoustic field completely, which is useful for avoiding the interference induced by acoustic impedance variations in tissues in the process of HIFU therapy. This work also confirmed that the dependencies obtained for RIV, RIVR, and treatment time are not affected by variations in the base electrical impedance of the phantom models of different shape and size; the differences are introduced only in fitted coefficients. Therefore, further studies on the coefficients for practical applications should be conducted to track the parameters of actual human bodies. In addition, real-time electrical impedance measurement system with high precision should also be designed to promote clinical applications of the proposed technology in treatment efficacy monitoring and dose control during HIFU therapy.
6. Conclusion
In conclusion, theoretical and experimental studies on temperature monitoring and efficacy evaluation in HIFU therapy were conducted based on the temperature–impedance relation using RIV measurements. A comprehensive system of HIFU therapy and impedance measurement for a cylindrical phantom was established. The distributions of acoustic pressure, temperature, conductivity, current density, and electrical potential at various acoustic powers were simulated. It was demonstrated that RIV increased linearly with rising treatment time at a fixed acoustic power, and RIVR exhibited a linear dependence on the acoustic power. To reach HIFU treatment efficacy, the required RIV was found to be inversely proportional to the acoustic power, while the required treatment time showed the inverse proportionality to the square of the acoustic power. Consequently, RIV and RIVR can be used to indicate treatment state, estimate acoustic power, and realize treatment time control in HIFU therapy. The favourable results provide the basis for real-time noninvasive temperature monitoring and efficacy evaluation, and also demonstrate the feasibility of accurate dose control in HIFU therapy.
Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |
| [19] | |
| [20] | |
| [21] | |
| [22] | |
| [23] | |
| [24] | |
| [25] | |
| [26] | |
| [27] | |
| [28] | |
| [29] | |
| [30] | |
| [31] | |
| [32] | |
| [33] | |
| [34] | |
| [35] | |
| [36] | |
| [37] | |
| [38] | |
| [39] | |
| [40] | |
| [41] | |
| [42] | |
| [43] | |
| [44] | |
| [45] | |
| [46] |