This paper investigates the exponential synchronization of linearly coupled ordinary differential systems. The intrinsic nonlinear dynamics may not satisfy the QUAD condition or weak-QUAD condition. First, it gives a new method to analyze the exponential synchronization of the systems. Second, two theorems and their corollaries are proposed for the local or global exponential synchronization of the coupled systems. Finally, an application to the linearly coupled Hopfield neural networks and several simulations are provided for verifying the effectiveness of the theoretical results.
Synchronization of linearly coupled ordinary differential equations (LCODEs) has been widely applied for decades to different fields, such as neuroscience,[1–4] economics,[5] biology,[6,7] ecology,[8] computer science,[9,10] and so on. Meanwhile, the synchronization technique for LCODEs has been favored by several researchers. For example, several researchers proposed an array of resistive coupled Chua circuits for implementing spatial recognition,[11] some presented various architectures of the coupled chaotic system for secure communication,[11–13] and numerous presented an architecture of the coupled neural networks to store and retrieve complex oscillatory patterns as synchronous states.[14] Therefore, the study of synchronization of LCODEs is significant and necessary.
So far, the synchronization of LCODEs has attracted a great deal of attention from researchers and has been investigated in various ways. The master stability function method based on the transverse Lyapunov exponents is introduced to analyze the local synchronization of coupled oscillators and general coupled dynamical systems.[15–17] In addition, the distance between the state of a coupled dynamical system and synchronization manifold is used to discuss global synchronization of the coupled system.[18,19] Furthermore, two special vectors are used to decompose the entire state space of a coupled dynamical system into a direct sum of the transverse space and synchronization manifold for studying local and global synchronizations of the coupled system.[20]
In this paper, the synchronization of LCODEs is analyzed in a different way. Synchronizing the coupled system means that the states of any two nodes converge to agreement as time . Then the synchronization of the coupled system can be achieved, making sure that the states of all the nodes converge to the state of a certain one among the nodes as time . It can be found that the coupled system can be transformed into a new one with state variables, which are the differences of the states between the certain node and the other ones. Thus, the exponential convergence of the latter implies the exponential synchronization of the former. Through the exponential convergence analysis of the latter, our results can be obtained.
Generally, the coupled dynamical system described by LCODEs is governed by the following two mechanisms: the intrinsic nonlinear dynamics at each node and the coupling configuration among the nodes. However, most of the existing results of synchronization of LCODEs are based on the assumption that the intrinsic nonlinear dynamics satisfy the QUAD condition or even the Lipschitz condition. The QUAD condition is used in numerous researches on synchronization.[20–23] For example, together with the dissipativity property of the coupling configuration among nodes, the QUAD condition is derived to prove the synchronization of linearly coupled Lorenz systems.[21] The QUAD condition is given in Ref. [22] for the synchronization of systems with non-Lipschitz right-hand sides. In Ref. [23], the QUAD condition is given for the synchronization of networks with discontinuous activations in the presence of time delays.
However, as far as we know, the LCODEs in which the individual dynamics do not satisfy the QUAD condition exist in many practical network systems. Such systems have been investigated in some literatures.[24–27] Therefore, the study of the synchronization of LCODEs is significant and necessary. It should be noted that such synchronization criteria may not be easily verified. Therefore, in order to study the synchronization of LCODEs in which the individual dynamics do not satisfy the QUAD condition or weak-QUAD condition, some new approaches should be proposed. Compared with the obtained results, we improve the QUAD condition, and propose two weaker conditions for local and global exponential synchronizations of LCODEs respectively on the one hand. On the other hand, our results are suitable for any linearly coupling configuration. This is the requirement that all the existing results for the exponential synchronization of LCODEs can almost never meet.
This paper is organized as follows. Section 2 shows the method of studying the synchronization of LCODEs, and several necessary definitions and lemmas are given. Section 3 presents the main results and their proofs, then several useful corollaries are proposed. The theoretical results are simply applied to the exponential synchronization analysis of linearly coupled Hopfield neural networks, and several simulations are provided in Section 4.
The following notations are useful in this paper. Let and denote respectively the n-dimensional real vector space and the whole real matrices with m rows and n columns. Let and denote respectively the n-dimensional complex vector space and the whole complex matrices with m rows and n columns. Let and denote respectively a zero matrix with m rows and n columns and the m-order identity matrix. We denote the transpose and the Hermitian adjoint of by and , respectively. If and λ is an eigenvalue of , then we denote the determinant of , the inverse of , and the real part of λ by , , and , respectively. Let . If is symmetric, then we denote the minimum eigenvalue and the maximum one of by and , respectively. Let denote the Kronecker product of matrices. Let denote the Euclidean norm on or the spectral norm on . Let denote the infinitely small quantity of higher order than .
2. Preliminaries
Generally, the coupled dynamical system described by LCODEs is given as follows:
where is the state variable of the i-th node only related with the time t, is a continuous map, and with assumption that and .
Let , , and . Then system (1) can be written as
Moreover,
is the coupling matrix with zero-sum rows, which is determined by the topological structure of the LCODEs.
Definition 1 If there exists a constant such that for any initial state satisfying , there exist , , and such that
for all , then system (1) is locally exponentially synchronized. Moreover, if for any initial state , there exist , , and such that the above formulas hold for all , then system (1) is globally exponentially synchronized.
Definition 1 describes the local and global exponential synchronizations of the LCODEs.
Definition 2 Suppose that is a symmetric and positive definite matrix and . denotes a class of continuous maps satisfying
for all and all .
Definition 3 Suppose that is a symmetric and positive definite matrix and . denotes a class of continuous maps satisfying that for any and any , there exists a matrix such that
for all .
It is not difficult to see that and have the following connection. If for any and any , there exists a matrix such that formula (4) holds, then implies . When the map is differential with respect to on its domain, formula (4) can be obtained.
To analyze the exponential synchronization of system (1), let , and . For every , it is not difficult to calculate that
where
Suppose , then
And suppose
Then for every ,
Moreover,
System (1) is exponentially synchronized when the trajectories of system (6) exponentially converge to the origin.
The following marks and lemmas are useful in the rest of the development.
Suppose
Let , where and , and
where , , , and . Then .
Lemma 1 The coupling matrix has at least an eigenvalue 0. If λ is an eigenvalue of and , then .
By the Gerschgorin theorem,[28] we can prove Lemma 1. The results related with Lemma 1 can be found in Ref. [20].
Lemma 2 and have the following relationships:
are the m eigenvalues of if and only if are the eigenvalues of .
Proof It can be shown that . By formulas (2) and (6), we have
namely,
for all . Because is a non-zero matrix, we have for all . Thus, . It implies that . Thus (a) and (b) hold.
Next, it is easy to verify that
Suppose that
Obviously, is reversible. Thus, we have
This implies that (c) holds.
Lemma 2 gives the representation of by the coupling matrix .
3. Main results
In this section, we investigate the exponential synchronization of system (1) with , , and , and present several results different from the existing ones.
Theorem 1 Assume that there exists a symmetric and positive definite matrix and a matrix such that . If there exists a real positive definite diagonal matrix such that is negative definite, then system (1) is globally exponentially synchronized.
Proof Let
For any right maximally defined solution of Eq. (6) with the initial time 0, let . Then the derivative of V along the solution of Eq. (6) satisfies
Let . Then is negative definite. By the Rayleigh–Ritz theorem,[28]
It is easy to see that and . Similarly, we obtain
where and . So we have
It can be shown that both and are defined on , and moreover, exponentially converge to 0 as . Hence, we prove this theorem.
Theorem 2 Assume that there exists a symmetric and positive definite matrix and a matrix such that . If there exists a symmetric and positive definite matrix such that is negative definite, then system (1) is locally exponentially synchronized.
Proof Suppose that
Then the derivative of V1 along the solution of (6) satisfies
Let , and , where is given in Definition 3 with . Then formula (5) implies that for any and any , is semi-negative definite, and thus, is also semi-negative definite. Since is negative definite, then similarly to the proof of Theorem 1, we have and . Hence,
Since
it is shown that there exists a constant such that if , then
By the Rayleigh–Ritz theorem,
where and . Then we obtain that if , then
This tells us that the key to proving this theorem is to find the appropriate initial states such that .
In fact, it can be shown that when
where and , we have on its domain. At this time, we can prove that both and are defined on , and moreover, exponentially converge to 0 as . Hence, this theorem is proved.
Theorem 1 and Theorem 2 give the criteria for the exponential synchronization of the LCODEs. For convenience, we propose the following corollaries.
Corollary 1 Assume that the continuous map satisfies the so-called weak-QUAD condition,[20] i.e., there exists a real positive definite diagonal matrix and a real diagonal matrix such that . If is negative definite, then system (1) is globally exponentially synchronized.
Proof Corollary 1 can be directly obtained from Theorem 1 with .
Corollary 2 Assume that the continuous map satisfies the global Lipschitz condition, i.e., there exists a constant such that
for all and all . If is negative definite, then system (1) is globally exponentially synchronized.
Proof Since satisfies the global Lipschitz condition, we can obtain
Thus, . By corollary 1, corollary 2 is proved.
Corollary 3 Assume that the continuous map satisfies the following condition:
for all and all . Then the following results hold:
(a) If is negative definite, then system (1) is globally exponentially synchronized.
(b) If is differential with respect to on its domain, , and is symmetric and positive definite, then system (1) is locally exponentially synchronized.
Proof It is easy to see that . Thus, by corollary 1, (a) holds.
Next, we need to prove (b). It can be shown that . Thus, by Theorem 2, we only need to find a symmetric and positive definite matrix such that is negative definite.
Let denote all the eigenvalues of . By Lemma 2, all the eigenvalues of are . Because , all the eigenvalues of C are non-zero. Again by Lemma 1, for all . This implies that the real parts of the eigenvalues of are all positive, namely, is a positive stable matrix. Thus, there exists a symmetric and positive definite matrix such that is symmetric and positive definite,[29] i.e., is symmetric and negative definite. Moreover, is symmetric and negative definite. When ,
so is negative definite. Hence, (b) is proved.
The above three corollaries all involve the negative definiteness of the matrices in the form of , where , , , and are as in corollary 1. The following proposition lists some conditions to make sure that such matrices are negative definite.
Proposition 1 Suppose that is a real positive definite diagonal matrix and is a real diagonal matrix. Choose . Let denote all the eigenvalues of and let denote all the eigenvalues of . Then we have that
if is a diagonal matrix, then the negative definiteness of is equivalent to
in particular, if is normal, then the negative definiteness of is equivalent to
if , , and is a symmetric matrix with all the eigenvalues , where , then the negative definiteness of is equivalent to
in particular, is normal, then the negative definiteness of is equivalent to
Proof Suppose and . Then is negative definite if and only if for all the non-zero vectors .
Suppose is non-zero. We have
Because is a real symmetric matrix, we have that there exists a real orthogonal matrix such that , where .[28] Thus,
Obviously, for all the non-zero vectors if and only if
Also, by Lemma 2(c), all the eigenvalues of are . If C is normal, then there exists a unitary matrix such that , where .[28] Moreover,
Suppose . Then
Of course, for all the non-zero vectors if and only if
Hence, (a) is proved.
(b) can be proved in the same way as that of (a).
4. Applications and simulations
In this section, we apply the theoretical results of this paper to the exponential synchronization analysis of linearly coupled Hopfield neural networks and illustrate the effectiveness of the theoretical results through simulations.
In system (1), for each i, let , where is a real diagonal matrix, , is a continuous map, and . Then system (1) can be written as
Let be chosen as with each gj continuous on . Then as we know, system (12) describes the linearly coupled Hopfield neural networks, where with for all is the coupling matrix and the differential equation describes the dynamics of the i-th Hopfield neural network with no coupling.
For simplicity, we assume that , with satisfying that g0 is a continuous function and there exists a constant such that
for all . Then it is not difficult to verify that
Let and let denote all the eigenvalues of . Then by Corollary 1, Corollary 3, and Proposition 1, we have the following conclusions:
(B1) if
then system (7) is globally exponentially synchronized;
(B2) if g0 is differential on , , for all , and
then system (7) is locally exponentially synchronized. In this case, we can see that system (7) is also globally exponentially synchronized because of the particularity of the map g.
Next, we illustrate the effectiveness of our results through simulations.
In simulations, suppose that in system (7), , , , and
Then conclusions (B1) and (B2) mean that if , or if , g0 is differential on , and , then system (7) is globally exponentially synchronized.
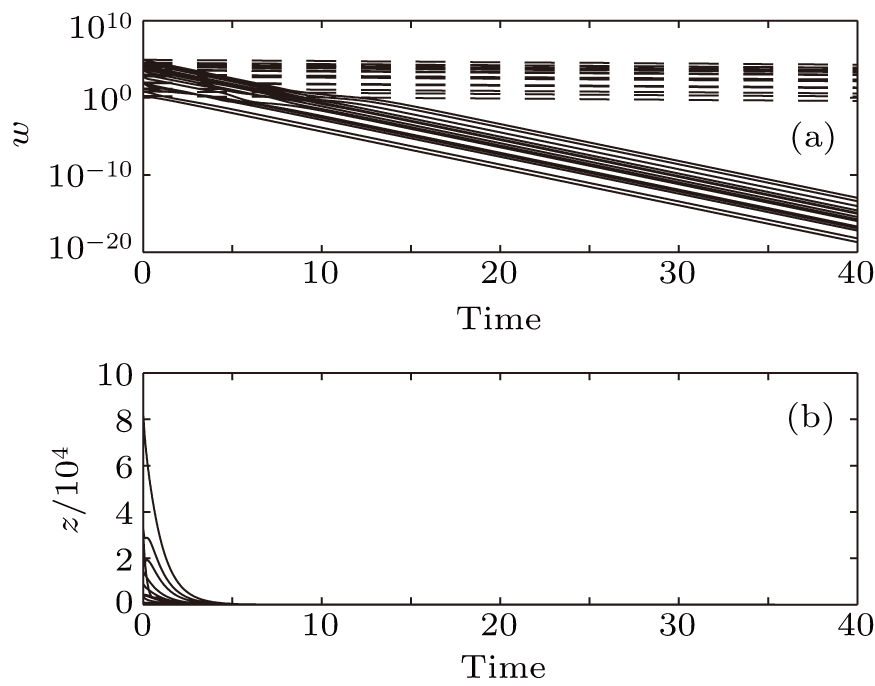
Let and . If for any initial states , the curve exponentially converges to 0, i.e., the curve is located below some straight line related with the initial states, and all the straight lines related with the initial states are parallel to each other, then system (7) is exponentially synchronized. Hence, we can roughly determine the exponential synchronization of system (7) by observing the trajectories of z and w with respect to time t in the following simulations.
Simulation 1 In system (7), let with and let the coupling matrix be
Then it is easy to obtain that
and . Figure 1(a) shows that for the randomly chosen initial states, all the curves are respectively located below the straight lines represented as the dotted lines, namely, ; figure 1(b) shows that for the randomly chosen initial states, all the curves converge to 0 when time t is long enough. Thus, figure 1 reflects the exponential synchronization of system (7).
Fig. 1. The trajectories of (a) w and (b) z with respect to time t obtained by choosing randomly initial states. In panel (a), the trajectories of w with respect to time t obtained by choosing randomly initial states disappear when time t is long enough because the numerical values of approximatively reach ; the dotted lines are given by .
Simulation 2 In system (12) as in Simulation 1, we only change the coupling matrix into
Then we have
and . In Fig. 2, we can see that system (7) is not synchronized. This tells us that when , system (7) might not be exponentially synchronized.
Fig. 2. The trajectories of z with respect to time t obtained by choosing randomly initial states.
Simulation 3 In system (7), let with . Then and g0 is differential on . Thus, implies the exponential synchronization of system (7).
Let the coupling matrix
Then, it follows . Figure 3(a) shows that for the randomly chosen initial states, all the curves are respectively located below the straight lines represented as the dotted lines, namely, ; figure 3(b) shows that for the randomly chosen initial states, all the curves converge to 0 when time t is long enough. Thus, figure 3 reflects the exponential synchronization of system (7). By comparing with simulation 2, it is shown that in system (7) with the coupling matrix A invariant, we can achieve the exponential synchronization of the system through the change of the map g.
Fig. 3. The trajectories of (a) w and (b) z with respect to time t obtained by choosing randomly initial states. In panel (a), the dotted lines are given by .
From the above analysis and simulations, it is concluded that the results of this paper can be applied to the exponential synchronization analysis of linearly coupled Hopfield neural networks.
5. Conclusion
This paper presents a new method of studying synchronization of LCODEs by using the matrix C represented by the coupling matrix A to simplify the LCODEs. Two theorems and their corollaries are presented for the exponential synchronization of the LCODEs. Among them, we propose two new conditions and for local and global exponential synchronizations of LCODEs, respectively. Compared with the obtained results in the references, the two new conditions are weaker than the QUAD condition that the intrinsic nonlinear dynamics satisfy. The results are suitable for any linearly coupling configuration. This is the requirement that all the existing results for the exponential synchronization of LCODEs can almost never meet.


{kind=link}
{kind=link}
{kind=link}