Design and optimization of carbon nanotube/polymer actuator by using finite element analysis
Project supported by the National Natural Science Foundation of China (Grant Nos. 11504051, 51202031, 61574037, and 11404058), the Natural Science Foundation of Fujian Province, China (Grant Nos. 2017J06014, 2015J01008, and 2014J01175), Fujian Provincial Program for Distinguished Young Scientists in University (Grant No. J1-1166), and Fujian Provincial Key Project of Natural Science Foundation for Young Scientists in University (Grant No. JZ160428).
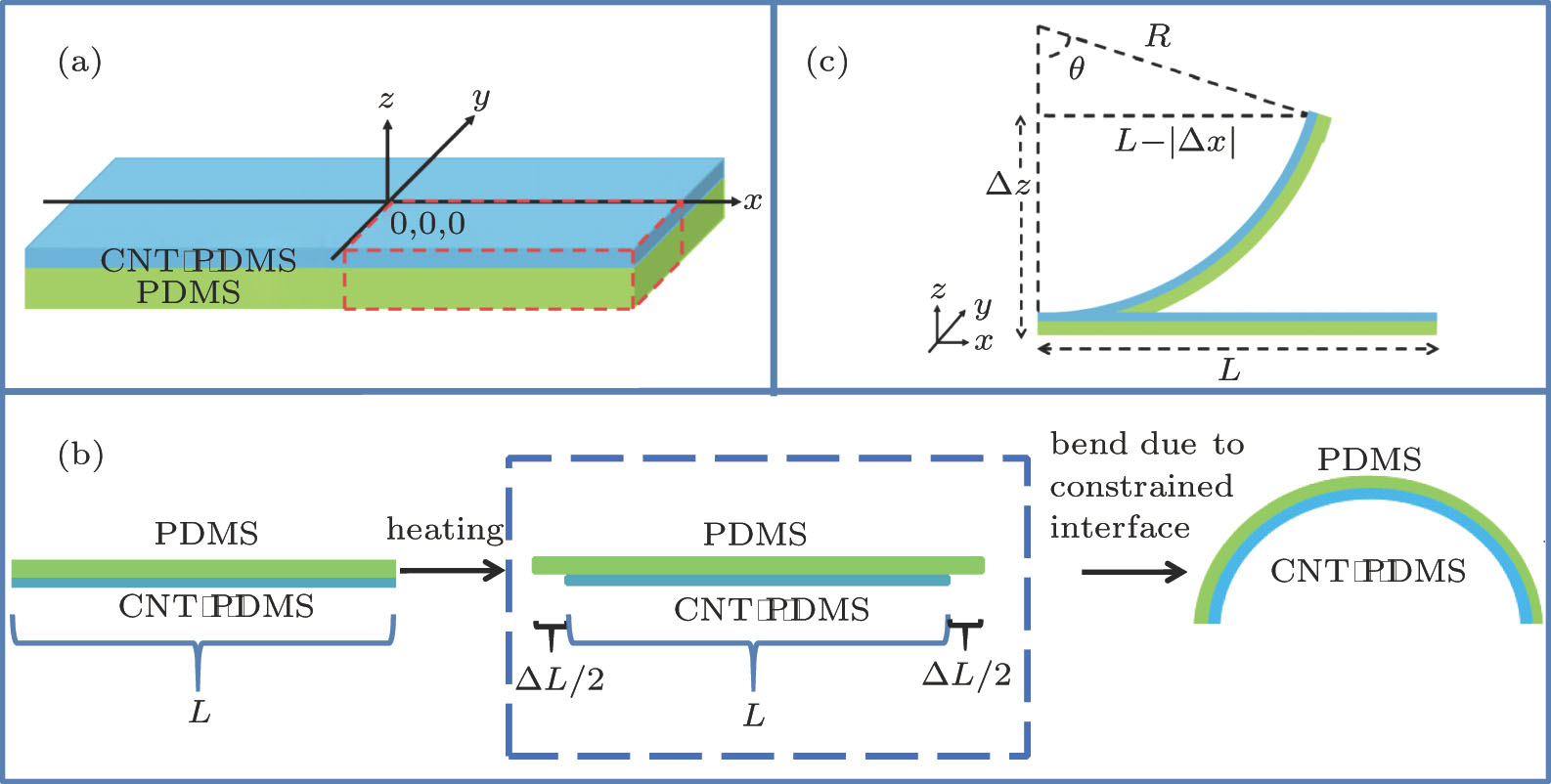
(color online) (a) Bilayer structure of CNT-PDMS/PDMS actuator without deformation. The line on the y axis is constrained, which is on the bottom surface. The part in the cuboid marked with red-dotted lines is the model used in the FEA simulation. (b) Illustration of the actuator bending mechanism. (c) Illustration of model at initial state and at bending state. L is defined as the length input for model. Δx and Δz are the free-end displacements of model from initial flat state to final bending state along x and z directions, respectively. θ is the bending angle of the model. R is the radius of the bending arc.