Improved control of distributed parameter systems using wireless sensor and actuator networks: An observer-based method
1. IntroductionThe wireless sensor and actuator networks (WSAN) have been receiving increased research interest due to their numerous applications in the fields of cyber-physical systems, forest fire fighting, environmental and industrial monitoring, and so on.[1–3] The actuators which have much stronger power than sensors can provide the appropriate actuation on the physical systems with the help of the networked sensors. In many scenarios, mobile actuators which can be attached to the mobile agents (terrain robots, underwater vehicles, UAVs) can improve the performance in different tasks.[4–6] A series of research results have been reported in applications of static and mobile sensor and actuator networks for finite dimensional systems, such as for coverage,[4] localization,[5] and optimal control, etc.[6]
On the other hand, most of the practical systems whose states vary both spatially and temporally are infinite dimensional systems, such as many thermal, chemical processes, and fluid flow, etc. These systems are commonly termed the distributed parameter systems (DPS). The past few years have witnessed increasing interest in the distributed parameter systems.[7–13] Especially, when the wireless sensor and actuator networks are used in distributed parameter systems, the estimation or control performance of the distributed parameter systems can be effectively improved. To enhance the system performance, how to navigate the wireless sensor and actuator networks and how to choose the control architecture are the main concern to be considered. The focus for these problems has motivated recent efforts in Refs. [14]–[18] and the references therein. For example, in Ref. [15], Chao and Chen considered the sensing and distributed control of a distributed parameter system by using Centroidal Voronoi tessellations and consensus strategy in the mobile sensor and actuator networks. The static output feedback control problem and adaptive control problem for the distributed parameter systems have been studied by Demetriou in Refs. [16] and [17], respectively, meanwhile the guidance of the mobile collocated sensor and actuator networks was designed.
In practical applications, it is impossible to have all the reliable information of system states, because some state variables cannot be measured or the number of the sensors is usually finite. Hence, one needs to estimate the physical systems using the finite measurement outputs in order to provide the feedback information to controllers. Then the observer-based control method is provided to obtain certain control objectives, which is attracting many researchers.[19–21] However, to the best of our knowledge, very little research attention has been paid to the combination of the guidance design of the mobile sensor and actuator networks and the control for the distributed parameter systems using the observer-based control method. Therefore, the main purpose of this work is to shorten such a gap by the study of how to navigate the networked actuators based on the observer-based control for the distributed parameter systems.
In this article, we investigate the observer-based control for the distributed parameter systems and the guidance scheme of the wireless sensor and actuator networks. Here, it is assumed that each sensor node is fixed and each actuator node with a controller can move freely in the spatial domain. Based on the measurement information provided by the fixed sensors, a centralized observer is designed to estimate the distributed parameter control system. Then the observer-based controllers are established to control the distributed parameter systems, meanwhile a motion strategy of the mobile actuators is provided to improve the control performance by using Lyapunov stability arguments.
The rest of this paper is organized as follows. In Section 2, a distributed parameter system and a network consisting of fixed sensors and mobile actuators are introduced, and a centralized observer and the observer-based controllers are presented. In Section 3, we present a guidance scheme for every mobile actuator and prove that the distributed parameter system controlled by the mobile actuators with the observer-based controllers is stable by using Lyapunov stability theory. A numerical example is given to verify the effects and advantages of our results in Section 4. Finally, conclusions are drawn in Section 5.
2. Problem formulationConsider the following distributed parameter system given by
with the Dirichlet boundary condition

and the initial condition

.

and

represent the time variable and spatial variable, respectively.

denotes the diffusing coefficient and

denotes the state of the system (
1). The function

denotes the spatial distribution of the
i-th moving actuator and

denotes the associated control signal.

denotes the time varying centroid of the
i-th moving actuator.
It is assumed that the spatial distributions of the m actuators are the same and given by
with

, where
ε is the spatial support of the actuators. The first-order dynamics for the
i-th mobile actuator is governed by
where the velocity

is to be designed.
In the wireless sensor and actuator network, n distributed sensors are used to provide the following measurement outputs on the distributed parameter system (1)
where

is the measurement output by the
i-th sensor, and

denotes the spatial distribution of the
i-th sensor whose position
ηi is fixed. It is also assumed that the spatial distributions of the
n fixed sensors are the same and given by
where
ν is the spatial support of the sensor.
Based on the above measurement information by the fixed sensors, we consider the following Luenberger observer:
where
and

is the observer gain. For simplicity,

is chosen as
with

.
According to the Luenberger observer (6), then the observer-based controllers are designed as
where

is the controller gain.
Remark 1 Usually, for the distributed parameter system, the full information of the process at all positions and times cannot be obtained by distributed sensors. Therefore, the estimation for the distributed parameter system from available measurements is needed before providing a better control. In this paper, the Luenberger observer (6) is used to make the estimation. Based on the estimation information, each actuator with the observer-based controller (7) gives the corresponding control signals on the target system. Besides the choice of the controllers, the control performance of the distributed parameter system also depends on how the actuators positions are chosen. So another task of this paper is to design the motion trajectory for each mobile actuator based on the estimation information to enhance the control performance of the distributed parameter system.
Remark 2 Notice that each distributed controller given by system (7) will receive the estimated state from the Luenberger observer (6) and yield the corresponding control signal. Using the first mean value theorem for integration, the control signal
 can be computed by
can be computed by
where

,

.

is the mean value of

on

.
Remark 3 Based on the assumption of each collocated mobile sensor/actuator pair, the static output feedback control problem for the distributed parameter system was studied by Demetriou in Ref. [16]. However, in the wireless sensor and actuator networks, sensor nodes are usually low-power, low-cost devices and actuator nodes have more energy and higher processing capabilities, so it is more practical to assume that each sensor node is fixed and each actuator node can move freely in the spatial domain. The problem of this paper, where n fixed sensors and m mobile actuators are utilized to make the observer-based control for distributed parameter systems, is more practically significant.
Now we can state the problem under consideration: Given the distributed parameter system (1) with the proposed observer-based controllers (7), implemented by the mobile agents, each of which has a controller and an actuator, we aim to derive a guidance scheme for each mobile agent to improve the control performance based on the state estimation (6).
In order to employ Lyapunov methods for the stability analysis of distributed parameter control system and the estimation error system, meanwhile to derive the guidance scheme for each mobile actuator, it is convenient to bring the above systems (1) into an abstract framework.
Using standard results from abstract theory, let
 be a Hilbert space with the inner product
be a Hilbert space with the inner product
 and corresponding induced norm
and corresponding induced norm
 .
.
 is a reflexive Banach space with norm denoted by
is a reflexive Banach space with norm denoted by
 and
and
 denotes the conjugate dual of
denotes the conjugate dual of
 with induced norm
with induced norm
 . It follows
. It follows
 with both embedding dense and continuously, and as a consequence we have
with both embedding dense and continuously, and as a consequence we have
 ,
,
 , for some positive constant c.[16]
, for some positive constant c.[16]
In this paper,
 is the state space, where
is the state space, where
 denotes the state of the distributed parameter system (1). The Sobolev space
denotes the state of the distributed parameter system (1). The Sobolev space
 is given by
is given by
 and its conjugate dual space
and its conjugate dual space
 is
is
 .
.
The second-order operator
 of the system is given by
of the system is given by
where

. Following Ref. [
16], the operator

is symmetric and satisfies
The input operator
 is defined by
is defined by
where

denotes the control signals by the
m actuators and

. From Eq. (
7), the observer-based control input

can be represented by

with the feedback gain matrix

. The output operator

is defined by
Then the distributed parameter control system (1) can be rewritten as
and the state estimation system (
6) can be represented as
where

.
Remark 4 Combining Eqs. (10) and (11), we obtain the dynamics of the extend state
 as follows:
as follows:
Letting
since

is a bounded perturbation of an infinitesimal generator

is the infinitesimal generator of a
C0-semigroup.
[22] So the well-posedness of Eq. (
12) can be established by using the fact that the operator

generates a
C0-semigroup.
Setting
 , then the following estimation error system can be obtained from Eqs. (10) and (11)
, then the following estimation error system can be obtained from Eqs. (10) and (11)
The well-posedness of Eq. (
13) can be obtained from the fact that

generates a

-semigroup.
Throughout this paper, λ and μ represent the maximum eigenvalues of the bounded positive operators
 and
and
 , respectively; ρ and σ represent the minimum eigenvalues of the positive operators
, respectively; ρ and σ represent the minimum eigenvalues of the positive operators
 and
and
 , respectively.
, respectively.
3. Stability analysis and guidance of mobile actuatorsIn this section, a Lyapunov-based approach will be utilized to design the trajectories of mobile actuators, meanwhile to prove the stability for distributed parameter control system (10) and the estimation error system (13). The idea on the construction of a Lyapunov functional is inspired from Refs. [16] and [17].
Consider the following Lyapunov functional candidate for the systems (10), (11), and (13)
where
Here,
p1,
p2, and
p3 are positive constants.
Remark 5 Noticing that the operators
 ,
,
 , and
, and
 are positive, we have the Lyapunov functional candidate
are positive, we have the Lyapunov functional candidate
 as nonnegative. In fact,
as nonnegative. In fact,
 and
and
 are considered for the stability of distributed parameter control system (10) and the estimation error system (13), respectively, and
are considered for the stability of distributed parameter control system (10) and the estimation error system (13), respectively, and
 is incorporated in order to derive the stable motion velocity for each mobile actuator by using the estimation information.
is incorporated in order to derive the stable motion velocity for each mobile actuator by using the estimation information.
Based on the fact that the operator
 is self-adjoint, the derivative of
is self-adjoint, the derivative of
 satisfies
satisfies
Using the inequality

and the fact that
λ is the maximum eigenvalue of the operator

, we obtain
On the other hand, the operator
 is also self-adjoint, since the operators
is also self-adjoint, since the operators
 and
and
 are self-adjoint. So the derivative of
are self-adjoint. So the derivative of
 is
is
Noticing that the system (
11) can be rewritten as
we have
Based on the inequality

and the fact that
μ is the maximum eigenvalue of

and
ρ is the minimum eigenvalue of

, we obtain
Taking an examination of the last term in expression (15), we have
When the velocity

for the
i-th actuator is given by
expression (
15) becomes
Noticing that the self-adjoint operator
 satisfies
satisfies
 , one has
, one has
Therefore, combining formulas (14), (17), and (18), we obtain
When the positive constants pi,
 satisfy
satisfy
 and
and
 , we gain
, we gain
where

is a function of the coercivity constant
τ in Eq. (
9) and the embedding constant
c.
[16]
From the above analysis, the main result is now summarized in the following theorem.
Theorem 1 Consider the distributed parameter system (1) with the observer-based control (7) by mobile actuators, where the state estimation
 is given by Eq. (6) using the measurement outputs (4). If there exist positive constants pi,
is given by Eq. (6) using the measurement outputs (4). If there exist positive constants pi,
 satisfying
satisfying
then the estimation error

and the system state

converge to zero. The guidance law for each actuator improves the control performance for the distributed parameter system (
1), where the control laws for the guidance of the mobile actuators are designed by
Remark 6 One may notice that the above control law for the i-th actuator depends on the difference of the estimation
 and
and
 . On the other hand,
. On the other hand,
that means

is the mean value of

on

. Letting

in Eq. (
21), the velocity becomes

, that means the guidance scheme for each mobile actuator uses the gradient information

and

at its position

.
4. Numerical resultsThe distributed parameter system (1) with
 is considered in the domain
is considered in the domain
 and the initial condition is set to
and the initial condition is set to
 . The wireless sensor and actuator network is assumed to have five static sensors and two mobile actuators. The positions for the five static sensors are chosen as
. The wireless sensor and actuator network is assumed to have five static sensors and two mobile actuators. The positions for the five static sensors are chosen as
 ,
,
 . The initial positions and velocities for the two mobile actuators are set to
. The initial positions and velocities for the two mobile actuators are set to
 ,
,
 ,
,
 ,
,
 , respectively. The spatial distributions of each actuator and each sensor are given by Eqs. (2) and (5) with
, respectively. The spatial distributions of each actuator and each sensor are given by Eqs. (2) and (5) with
 and
and
 .
.
It is assumed that the centralized estimator with
 ,
,
 satisfies the initial condition
satisfies the initial condition
 . The observer-based controllers (7) are assumed with the controller gains
. The observer-based controllers (7) are assumed with the controller gains
 . For comparison, two fixed actuators with the same spatial distributions (2) and controller gains as the mobile actuators are considered for the distributed parameter control system (1). In this case, the two actuators are fixed at
. For comparison, two fixed actuators with the same spatial distributions (2) and controller gains as the mobile actuators are considered for the distributed parameter control system (1). In this case, the two actuators are fixed at
 ,
,
 .
.
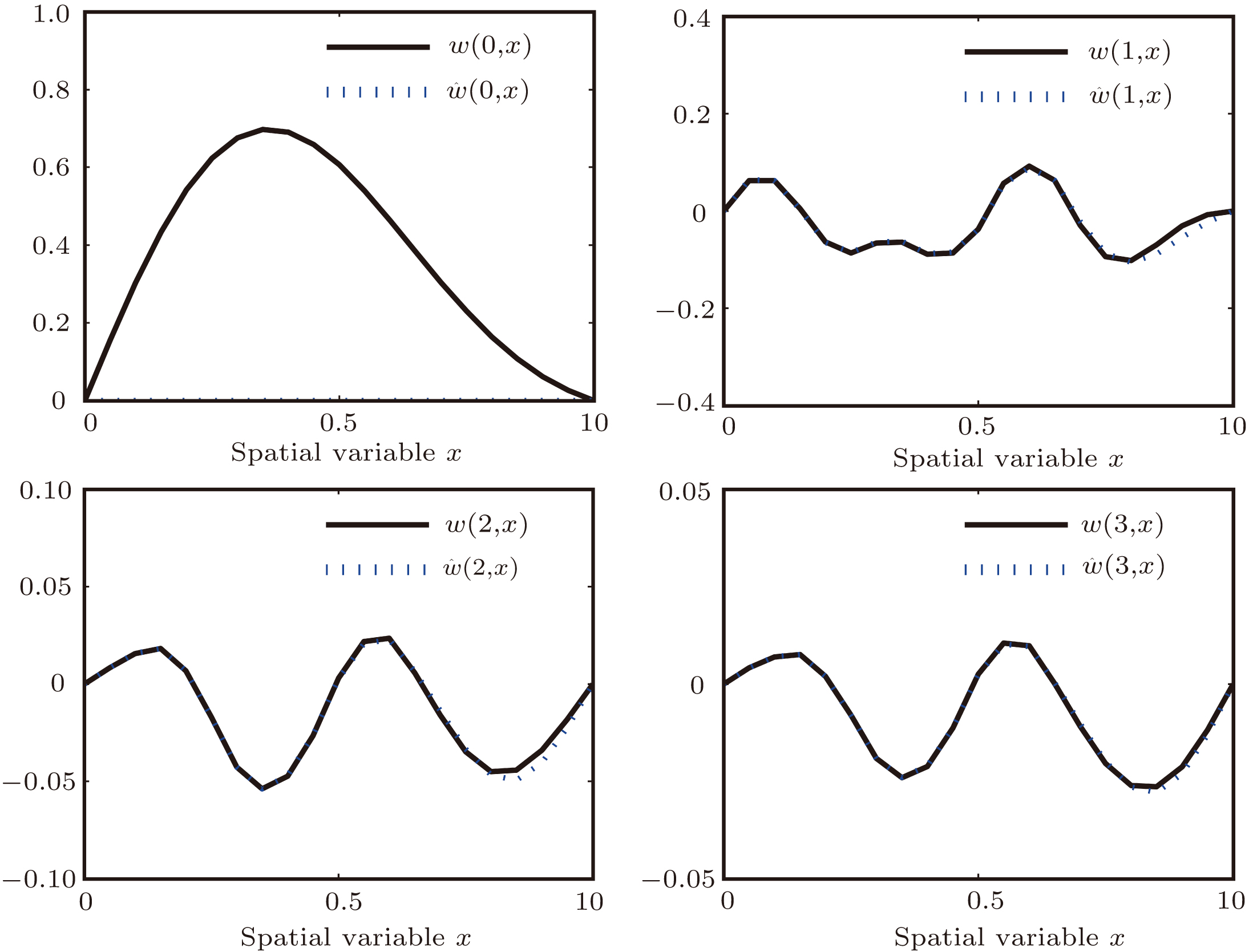
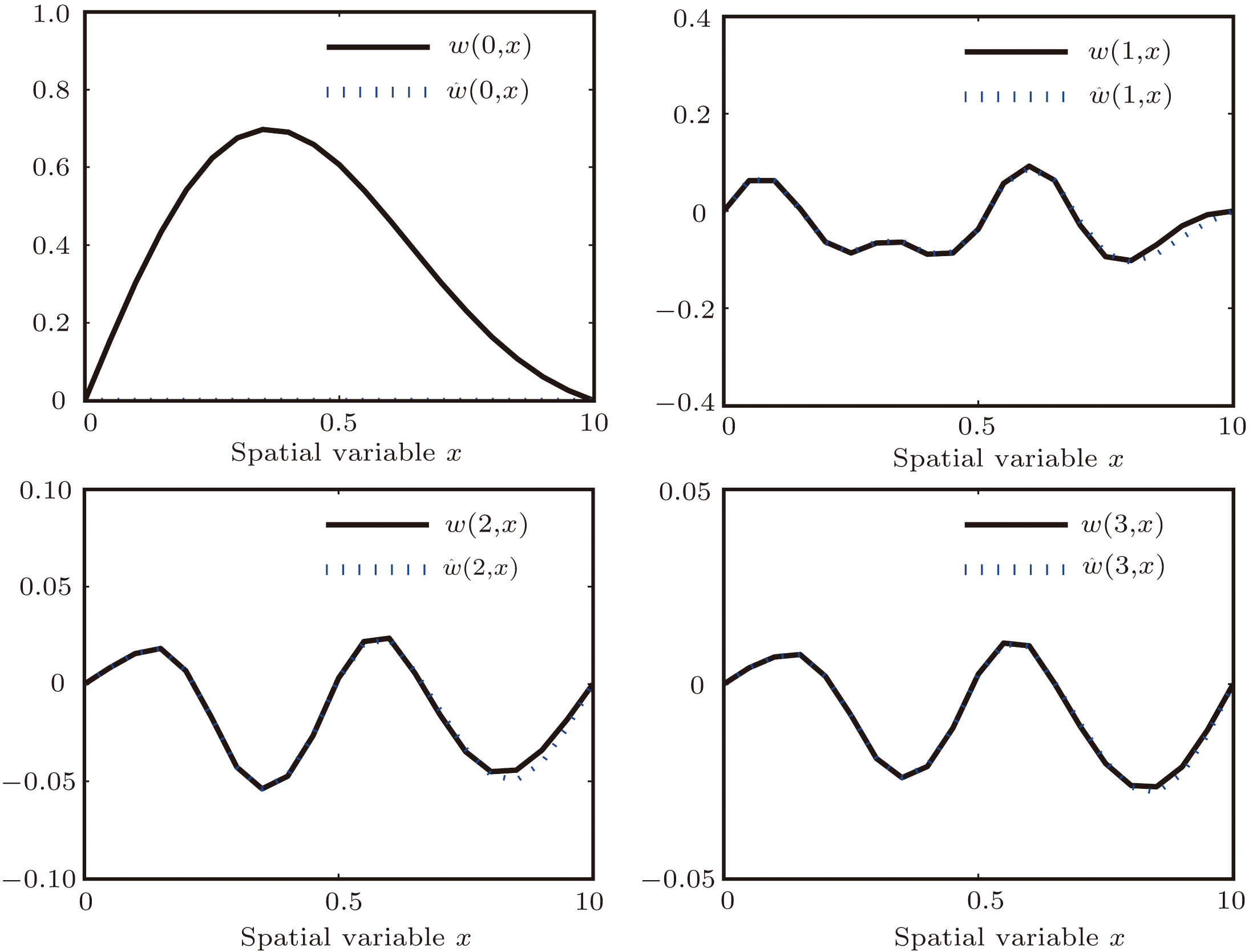
Figure 1 depicts the space distribution of the actual system and its estimates at four different time instances. It is observed that the estimator can provide a better estimation of the target system.
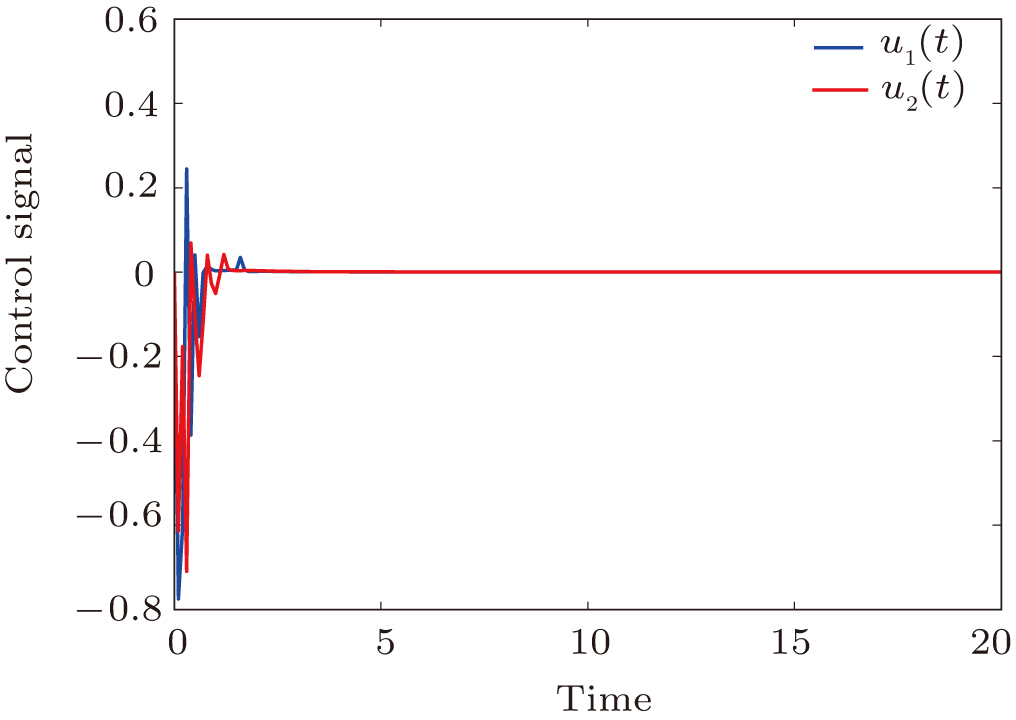
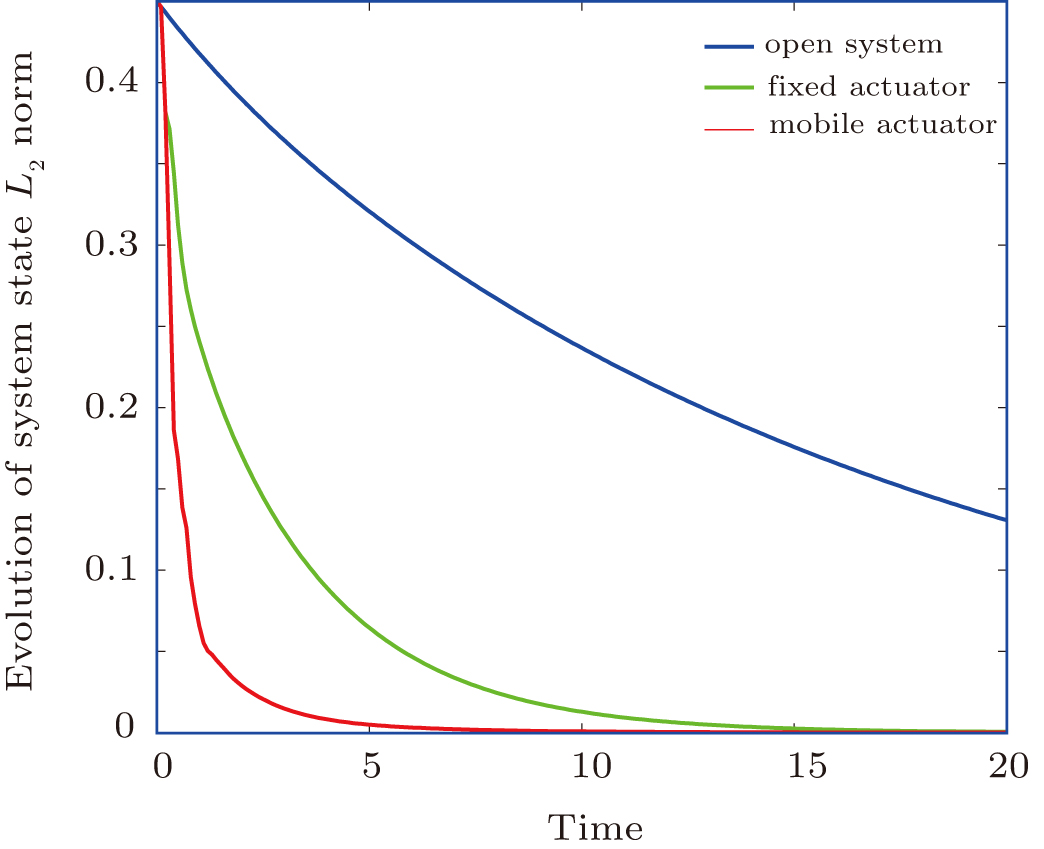
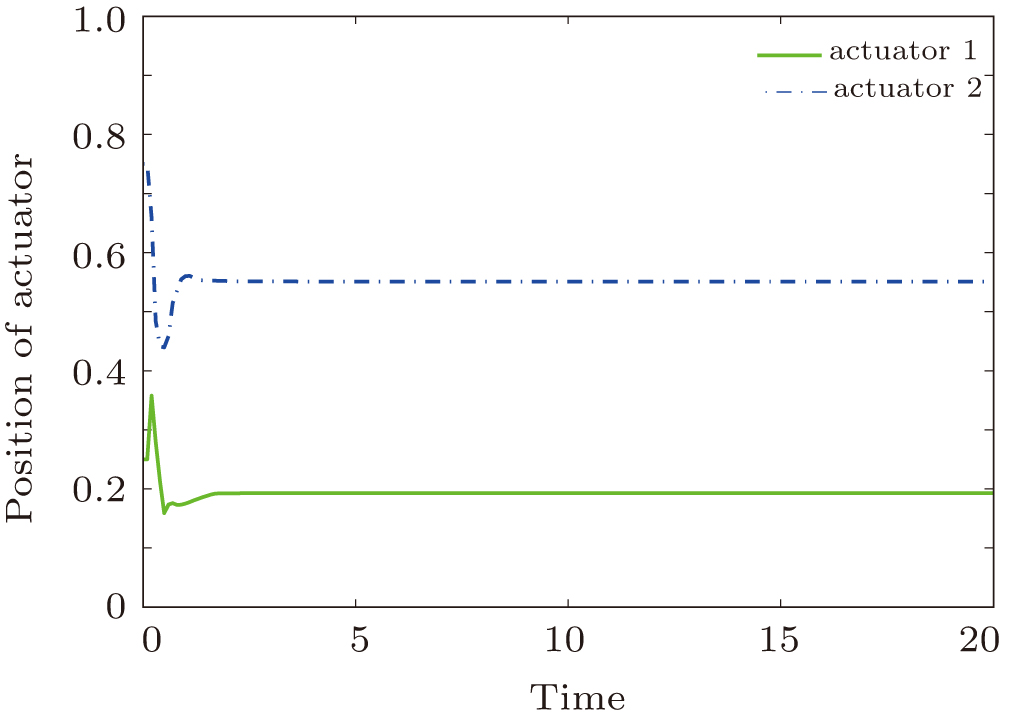
Figure 2 depicts the observer-based control signals which are dispensed to distributed parameter system (1) by the two mobile actuators. Figure 3 presents the state
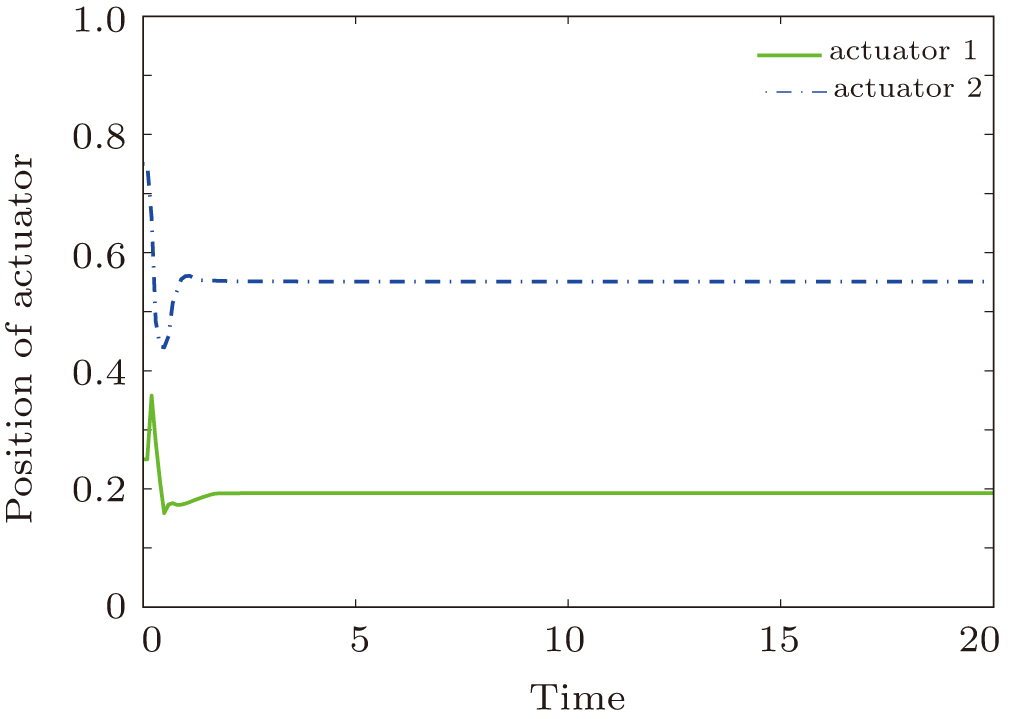
 norm for the uncontrolled case, the case of the mobile actuators and fixed actuators. One can observe that when the actuators are mobile, the state norm converges to zero much faster than the fixed case. Finally, the trajectory for the two mobile actuators is depicted in Fig. 4.
norm for the uncontrolled case, the case of the mobile actuators and fixed actuators. One can observe that when the actuators are mobile, the state norm converges to zero much faster than the fixed case. Finally, the trajectory for the two mobile actuators is depicted in Fig. 4.
5. ConclusionsIn this paper, the observer-based control problem for the distributed parameter system has been considered by using the wireless sensor and actuator network in which it is assumed that sensors are fixed and actuators can move freely in the spatial domain. Based on the measurement information provided by the fixed sensors, a centralized observer has been designed. Meanwhile the observer-based controllers have been provided to control the distributed parameter system. Furthermore, the stability of the estimation error system and the distributed parameter control system has been analyzed by using Lyapunov stability arguments, meanwhile, a guidance scheme for each mobile actuator has been provided to improve the control performance. Simulation results have demonstrated the effectiveness and the advantages of the proposed approaches. It should be pointed out that our main result can be extended to other distributed parameter systems such as linear or nonlinear reaction–convection–diffusion systems with or without time-delays. This will be our next research work.
{kind=link}
{kind=link}
{kind=link}
{kind=link}