Asymptotic bounded consensus tracking of double-integrator multi-agent systems with bounded-jerk target based on sampled-data without velocity measurements
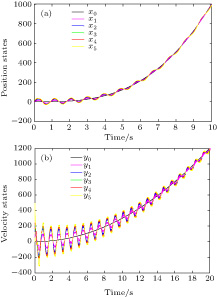
(color online) Positions and velocities of systems (

Asymptotic bounded consensus tracking of double-integrator multi-agent systems with bounded-jerk target based on sampled-data without velocity measurements |
|
(color online) Positions and velocities of systems ( |
| |