Ni Qing, Huang Yi-Yong, Chen Xiao-Qian. Nonlinear control of spacecraft formation flying with disturbance rejection and collision avoidance. Chinese Physics B, 2017, 26(1): 014502
Permissions
Nonlinear control of spacecraft formation flying with disturbance rejection and collision avoidance
Ni Qing, Huang Yi-Yong, Chen Xiao-Qian †
College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China
Project supported by the National Natural Science Foundation of China (Grant No. 11404404).
Abstract
A nonlinear controller for disturbances rejection and collision avoidance is proposed for spacecraft formation flying. The formation flying is described by a nonlinear model with the J2 perturbation and atmospheric drag. Based on the theory of the state-dependent Riccati equation (SDRE), a finite time nonlinear control law is developed for the nonlinear dynamics involved in formation flying. Then, a compensative internal mode (IM) control law is added to eliminate disturbances. These two control laws compose a finite time nonlinear tracking controller with disturbances rejection. Moreover, taking safety requirements into account, the repulsive control law is incorporated in the composite controller to perform collision avoidance manoeuvres. A numerical simulation is presented to demonstrate the effectiveness of the proposed method. Compared to the conventional control method, the proposed method provides better performance in the presence of the obstacles and external disturbances.
Spacecraft formation flying (SFF) is a concept that involves accomplishing space missions with multiple spacecrafts in designed arrays. SFF has many advantages over the traditional monolithic spacecraft system. It enables various space missions with enhanced reliability, flexibility, and efficiency. One notable mission involving the formation concept is the Defense Advanced Research Projects Agency's (DARPA) F6 program. This mission is to perform a common objective via distributed satellite operations. [1] SFF was developed as a revolutionary technique by NASA and ESA, used in the PRISMA mission, [2] TPF-I, [3] etc. Regardless of the broad prospects of SFF, technological challenges come with increased complexity, such as efficient fuel cost, precise formation control, and flying safety requirements. Efficient fuel cost is critical to any space mission, while high accuracy in control makes it possible to execute various space formation missions. Additionally, the collision avoidance problem is an important issue when formation reconfiguration is being carried out by multiple spacecraft manoeuvres in close range.
Many researchers have made significant contributions in the field of spacecraft formation control. The most popular model for formation flying is based on the Clohessy & Wiltshire (CW) [4] or Tschauner & Hempel (TH) [5] equation. Following this linear scheme, different methods have been proposed for formation flying. [6–8] To further improve the accuracy of control, investigations on nonlinear models and control strategies have begun in recent years. New nonlinear control techniques, such as sliding mode (SM), [9] recursive backstepping, [10] and nonlinear adaptive control [11, 12] have been investigated. During the last decade, the state-dependent Riccati equation (SDRE) has been a popular method for the design of controllers used in nonlinear systems. [13] It changes the nonlinear system to a pseudo-linear structure, which has state-dependent coefficient (SDC) matrices. Thus, the classical optimal control theory can be applied to the SDC matrices. This technique has been extended to spacecraft control. [14] For the tight formation reconfiguration, fast convergence is desirable. Compared to other finite time control methods, [15] SDRE could achieve finite time control and nonlinear optimal control simultaneously. An approximate closed-loop solution to optimally control spacecrafts with a finite time cost function was developed for the Reusable launch vehicle. [16] Therefore, the SDRE technique is an alternative method for nonlinear finite time optimal control.
For the spacecraft formation control, the state tracking accuracy should be guaranteed even in the presence of disturbances. An adaptive control architecture that rejects disturbances was proposed to solve the problem of tracking a manoeuvring target. [17] Using mean relative states, a nonlinear controller was derived for a pair of formation flying satellites, which includes the J2 effect in system dynamics. [18] Based on second-order SM, a nonlinear controller was proposed for spacecraft formation flying in the presence of nonlinear dynamics and J2 perturbations. [19] In the broad control area literature, an approach based on the Internal Mode (IM) principle has been developed to track the reference trajectory asymptotically and reject disturbances in uncertain nonlinear systems. [20, 21] Based on the IM principle, robust servo-regulators for uncertain satellite-systems were developed; these regulators were capable of eliminating the harmonic fluctuations caused by disturbance forces. [22] The IM principle has great advantages regarding disturbances rejection for formation tracking.
Flying safety requirements, such as path constraint requirements or collision avoidance, constitute an important and fundamental goal in spacecraft formation. Consequently, they have been actively studied by researchers in the control community. An analytical model of a predictive controller for fuel-minimised, collision-free trajectory has been cited in the literature. [23] Compared to other methods like semi-definite programming [24] or optimization-based methods, [25] artificial potential field (APF) guidance is considered an effective method to deal with safety issues. It has been used extensively in robot navigation and control [26, 27] and further extended to orbital vehicles. The autonomous on-orbit assembly of the large space structure has been presented using a superquadric APF. [28] By employing special potential functions and a time-varying sliding manifold, reference [29] studied target tracking, obstacle avoidance, and formation keeping. Based on potential functions and sliding manifolds, two control algorithms were proposed for formation flying with collision avoidance and disturbances rejection. A Riccati based tracking controller with collision avoidance has been presented for spacecraft formation flying near elliptic reference orbits. [30]
Nevertheless, only a few of the aforementioned works take the requirement of obstacle avoidance, finite time optimal control, and disturbances rejection into consideration simultaneously. Furthermore, the problem of finite time tracking with collision avoidance becomes more complex and difficult when designing control systems. Motivated by this open issue, formation flying, including the finite time approach, disturbances rejection, and collision avoidance, is to be considered in this work. The spacecraft proximity motion is described by nonlinear equations. Then, the SDRE method is adopted to solve the nonlinear control problem via SDC transforms. Because of its linear-like structure, IM is integrated to eliminate disturbances. Finally, the collision avoidance strategy is incorporated to form a composite control law. This composite controller is designed to achieve control objectives. As opposed to the work in [29], SDRE and IM are integrated instead of the SM, and the repulsive forces are defined in terms of two items. Reference [30] used the linear model, and disturbances were not considered; a different potential function was analysed. The major contributions of this study are summarised as follows: (i) the nonlinear model is converted into a pseudo-linear like form via SDC; (ii) the IM controller is integrated with the SDRE-based controller for finite time optimal control and disturbances rejection; (iii) flying safety is guaranteed by virtual repulsive forces in terms of both position and velocity.
The structure of this paper is as follows. Section 2 presents the nonlinear relative dynamic equations with J2 perturbance and atmospheric drag. Then, in section 3, the finite time optimal controller with disturbances rejection and collision avoidance is developed. Numerical simulations are presented in section 4 to demonstrate the effectiveness of the proposed method. Finally, the conclusions of this work are presented in Section 5.
2. Problem formulations
2.1. Nonlinear equations of relative motion
Consider multiple spacecrafts in Low Earth Orbit (LEO), where one of them is defined as the reference spacecraft, and the others are called followers. The relative dynamics of formation flying is described in the Local Vertical Local Horizontal (LVLH) frame. The LVLH frame is denoted by , with its origin located at the centre of the reference spacecraft. The axis points from the Earth's centre towards the reference spacecraft; the axis is perpendicular to the orbital plane and points in the direction of the angular momentum vector. Finally, the axis completes the right-handed orthogonal triad. Throughout this paper, except in special illustrations, every three-dimensional column vector is written in the coordinate form to represent the components along each axis in the LVLH frame.
Let and denote the position and velocity vector of the i-th spacecraft in the LVLH frame; then, the nonlinear relative motion dynamics with perturbations can be described as follows: [31]
(1)
(2)
with
where is the true anomaly of the reference spacecraft, is the distance between the reference spacecraft and the Earth's centre, μ is the gravitational constant of the Earth, mi is the mass of the i-th spacecraft, ri is the distance between the i-th spacecraft and the Earth's centre, is the disturbance acceleration, and is the control acceleration. Note that if the inter-satellite distance is in the order of 1 km, the above model has high fidelity and is adaptive to any eccentric orbit. For the sake of conciseness, the notations and are used to simplify formulations.
The rate of the true anomaly of the reference spacecraft is given by [32]
(3)
where is the mean motion of the reference spacecraft, is the semi-major axis of the reference orbit, and is the orbit's eccentricity. Thus, the differentiation of Eq. (3) results in the rate of change of the true anomaly,
(4)
2.2. Disturbance descriptions
Disturbances are considered for a more precise relative dynamics. Some causes of external disturbances are the Earth's oblateness effect, atmospheric drag, and solar radiation pressure. For the spacecrafts in LEO ( km), friction with residual atmosphere could not be neglected. Among these perturbations, the Earth's oblateness and atmospheric drag are dominant. [33] These two major perturbations are considered in the nonlinear model. The relative J2 perturbation acceleration acting on the i-th spacecraft is given by the gradient term [34]
(5)
with
where J2 is the second zonal harmonic coefficient of the Earth, is the radius of the Earth, i is the orbit inclination, u denotes the argument of latitude and has the relation , and ϖ is the argument of perigee.
The relative effect of the atmospheric drag acting on the i-th spacecraft is obtained as [33]
(6)
where .
Thus, the total disturbance acceleration , consisting of the J2 term and atmospheric drag term, is
(7)
3. Control law design
3.1. Control objective
The control objective is to acquire a geometric formation configuration. The predetermined configuration considers each spacecraft in formation to be on one of the vertices of an equilateral triangle. Therefore, the reference spacecraft is also assumed to be on one vertex of the triangle. The goal is to design a closed-loop controller such that: (i) the other two spacecrafts reach the destination point at a specified time to form a triangular configuration; (ii) the disturbances are well rejected in the manoeuvring process as well as at the configuration point; (iii) no collision contact occurs when reconfiguration manoeuvres are executed.
The following assumptions are made for the synthesis of the control law. (i) The mass change in the i-th spacecraft is assumed to be small during the manoeuvre; thus mi could be assumed to be known and constant in the mission. (ii) Orbital elements of the spacecraft and the formation navigation information could be measured accurately and obtained in time. [35]
3.2. Nonlinear control and SDC parameterization
In this subsection, the SDRE principle and the SDC matrices are presented for nonlinear control. The nonlinear control law design is applied using the state space representation. The normal input-affine nonlinear system of the first-order differential state equation has the following form:
(8)
where is the state vector, is the control acceleration, and and represent the nonlinear dynamics. Generally, the state vector consists of the relative position and velocity components.
The finite time linear state-dependent quadratic cost function of the state and control vectors are defined as follows:
(9)
where and are the weighting matrices on the states and control input respectively. Equation (8) could only be used to solve the linear control problem. The SDRE strategy provides an effective algorithm for synthesizing nonlinear feedback controls by allowing nonlinearities in the system states. [36] To solve the nonlinear optimal control problem, the dynamic equation (Eq. (2)) is written as a pseudo-linear structure by first using SDC parameterization
(10)
The state vector is given by for the position manoeuvres. is formulated as
(11)
where
The following assumption is made to obtain a closed loop solution using the SDRE method: [37] and are point-wise stabilized and observable for all in the domain of interest, where is the Cholesky decomposition of . The controllability and observability are checked based on the rank of the controllable and observable matrices.
Then, the following equation is solved to obtain the optimal control input
(12)
with and the final condition .
In the finite time case, the solution is a time-dependent differential equation rather than an algebraic one. For the position control of the formation, a finite time controller is designed based on the SDRE method. According to the finite time analytical approach, [38] the control acceleration is calculated as follows:
(13)
3.3. IM-based control law
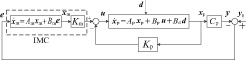
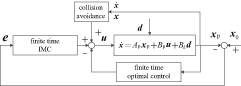
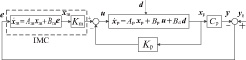
This subsection explains the process of designing a controller to reject the unknown disturbances and track the reconfiguration point. Figure 1 shows the proposed closed-loop structure. The state error is considered first. Then, the IM Control (IMC) part is followed by the finite time nonlinear optimal control law, which was discussed in the previous subsection.
Fig. 1. The closed-loop structure of tracking control.
Generally, the disturbance consists of two parts: structure part and non-structure part. The structure part is the dynamic model of the disturbance, and the non-structure part is the magnitude gain. The system equation of the IMC is written as
(14)
where is the 6-dimensional state vector of the i-th spacecraft, is the tracking error, is the dynamic system of the disturbance signals, and is the desired state. The finite time optimal tracking problem can be converted to a finite time regulation problem by defining the state vector . The nonlinear system equation of the real model is described by
(15)
where is the 6-dimensional state vector of the i-th spacecraft, is the control input, is the disturbance signal, and is the dynamic function of real plant.
The original state can be extended to the components of a larger vector in an exogenous state. Defining the augmented state vector , , the nonlinear closed-loop system is given by
(16)
where
The IMC gain and the state feedback gain are specified by and . Then, the tracking control law is defined as
(17)
The tracking control law consists of two parts: the state feedback control law and the IM control law . The state feedback controller tracks the reference state, and the IM controller rejects the unknown disturbances.
3.4. Collision avoidance control law
Collision avoidance during manoeuvres is achieved using high potential values to denote the forbidden areas. The vehicle could move away from the forbidden areas along the negative gradient of the APF. In space missions, the forbidden areas would be other space vehicles, path constraints, etc. To avoid a moving object, an intuitive scheme that takes into account the relative position and velocity components was designed by [41]. Owing to the symmetry of the Gaussian function and the spherical shape of obstacles, the proposed repulsive potential function is selected to be in a Gaussian form
(18)
where is a positive constant that shapes the repulsive potential magnitude, is the distance between the i-th spacecraft's position and the j-th spacecraft's position , is the standard deviation of the bell-shaped curve, Doij is the radius of the j-th spacecraft's influence region, and Lo is the radius of the spacecraft's exterior surface. is the relative parallel velocity between the i-th spacecraft and the j-th spacecraft, given by
(19)
where and are the corresponding velocities of the i-th spacecraft and j-th spacecraft, is the unit vector pointing from the i-th spacecraft to the j-th spacecraft and . If , the i-th spacecraft is flying away from the j-th spacecraft and no avoidance action is needed; otherwise, the i-th spacecraft is moving towards the j-th spacecraft; then, the avoidance manoeuvre must be executed within the influence region of thej-th spacecraft.
The influence region of the j-th spacecraft is defined as follows:
(20)
where do is the constant multiple factor, Dsij is the minimum stopping distance, determined as
(21)
where is the maximum acceleration allowed by the control actuator.
The perpendicular velocity between the i-th spacecraft and the j-th spacecraft is defined as
(22)
where is the magnitude of the velocity vector and is the unit vector perpendicular to .
The corresponding repulsive force is defined as the negative gradient of the repulsive potential with respect to the position and velocity terms,
(23)
with
The corresponding derivatives are computed as follows:
, , and are defined to simplify the representation. Thus, the gradient of the repulsive potential is
(24)
Therefore, the repulsive force generated by the j-th spacecraft is given by
(25)
with
The following conditions are satisfied by formulas deriving.
,
, ,
, ,
, .
Thus,
Therefore, the parallel force is along the negative direction of and stops the i-th spacecraft from moving closer to the j-th spacecraft. The perpendicular part is in the same direction as and steers the i-th spacecraft for detouring.
3.5. The composite control law
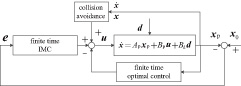
In this subsection, the process of designing a nonlinear feedback controller for achieving the control objectives is discussed. Given the relative motion described by Eq. (16) under disturbances given in Eq. (7), the control structure is designed as shown in Fig. 2. The following composite controller enables the system to achieve the control objectives discussed in Section 3.1.
(26)
where is calculated using Eq. (17). The repulsive acceleration is the sum of all the repulsive effects and is given by
(27)
where n is the number of the spacecraft and is the repulsive force generated by the j-th spacecraft.
In this section, simulation results are presented for the formation flying control. As a demonstration of the proposed approach, a formation manoeuvre scenario is considered. In addition, two comparison scenarios are utilized to justify the performance. Table 1 gives the physical parameters of the spacecraft. Table 2 summarises the orbital elements. The reference orbit is the sun-synchronous orbit, which has an approximate altitude of 400 km. Table 3 lists the symbols used in the simulations.
In this scenario, the desired triangle formation configuration has a 1000 m length on each edge. Table 4 gives the parameters used in the scenario, which are described in the LVLH frame. S1 is assumed to be static and located at a vertex of the triangle. S2 and S3 carry out manoeuvres to the destination point. The spacecraft in the influence range of colliding is considered an obstacle. The simulation is implemented using the model described in Eq. (16) and the control law according to Eq. (26). The following weighted matrices are selected: , and .
Table 4.
Table 4.
Table 4.
Parameters used in the simulation.
.
Parameters
Value
S1 initial state
(0, 0, 0, 0, 0, 0)T
S2 initial state
(–1040 m, 2000 m, 200 m, 0, 0, 0)T
S3 initial state
(–590 m, 2500 m, 200 m, 0, 0, 0)T
S2 desired state
(500 m, 870 m, 0, 0, 0, 0)T
S3 desired state
(–500 m, 870 m, 0, 0, 0, 0)T
μ
398600.4418 km3/s2
5 m
3
30
1000 s
100 ms
Table 4.
Parameters used in the simulation.
.
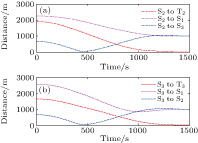
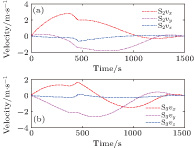
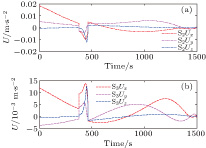
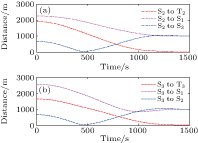
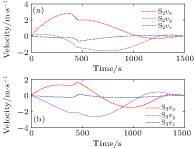
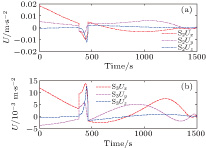
As shown in Fig. 3, the formation shape converges to the desired pattern in less than 1500 s. Figure 4 shows the relative distances between the spacecrafts in the formation. It can be seen that the distance between S2 and S3 becomes shorter in the early phase. The distance is close to the minimum value (38.87 m) at around 465 s. Then, the relative distance rapidly increases with the repulsive force. The other relative distances in the formation are greater than those specified in the safety requirements. The minimum distance between any two spacecrafts is never less than 10 m; thus, no collision occurs. Figure 5 indicates that the velocities of the two manoeuvring spacecrafts in the formation converge to the desired values within 1500 s. The control input histories are shown in Fig. 6. When S2 is moving ahead of S3 or out of the influence range of S3, S3 does not have repulsive effect on S2. Once S2 enters into the influence range of S3, S3 is considered as the obstacle, and S2 needs to detour around it. Thus, the velocity and control accelerations change rapidly to execute the avoidance manoeuvre in the obstacle influence range. It indicates that the control magnitudes are at the proper level and do not exceed the spacecraft's maximum drive capability.
Fig. 6. (color online) Control accelerations of spacecrafts (a) S2 and (b) S3 in formation.
3.8. Scenario 2: Comparison of the control strategies
To validate the theoretical analysis, the controller with single repulsive force control [42] is verified and compared with the proposed controller in Eq. (26). Note that only the repulsive control parts are compared; the other control parts are selected to be identical for these two control strategies. The simulation conditions are the same as those in scenario 1.
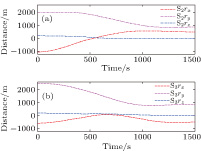
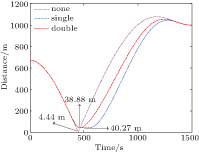
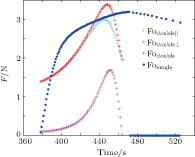
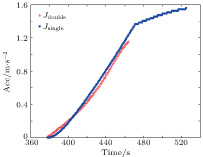
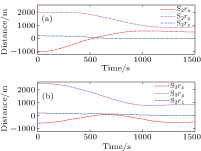
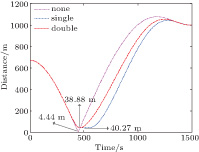
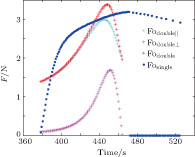
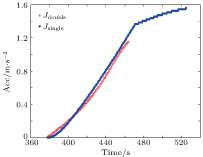
The relative distances between the spacecrafts are shown in Fig. 7. The non-repulsive control case is selected as an auxiliary statement. The minimum distance with non-repulsive force is 4.44 m, which is less than the safe distance. Without the repulsive force, collision occurs. The distance results indicate that flying safety could be guaranteed by both the repulsive control strategies. The repulsive forces for two cases (described in the LVLH frame) are shown in Fig. 8. For the double repulsive force case, when S2 enters into the influence range of S3, S3 generates two kinds of repulsive forces: the parallel part (cyan line) that decreases the velocity pertaining to S3; the perpendicular part (magenta line) that changes S2's velocity direction such that S2 makes a detour around S3. At the same time, S3 enters the influence range of S2, and a similar set of repulsive forces act on S3. The red line is the magnitude of the repulsive force generated by the double repulsive force method. The blue line shows the magnitude of the singular repulsive force. There is little difference in magnitude between the two kinds of forces. The obvious differences are the effect time and the trends. Both the strategies begin to have an effect at 379 s. However, the end times are not the same. One is at 465 s, and the other is at 526 s. Thus, the two cases have an effect time of 86 s and 147 s, respectively. The corresponding fuel cost is shown in Fig. 9. The cost of the single repulsive force strategy is 1.57 and that of the double repulsive force strategy is 1.15. From Figs. 7 and 9, it can be seen that the control strategy involving double repulsive force is more desirable.
Fig. 9. (color online) Fuel cost of two avoidance strategies.
3.9. Scenario 3: Formation keeping
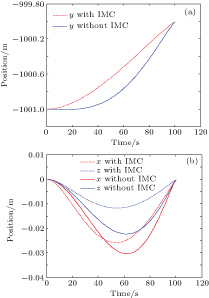
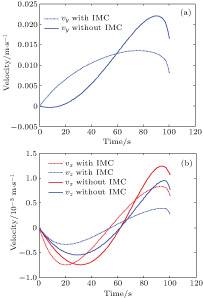
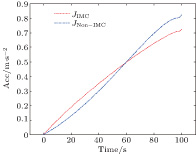
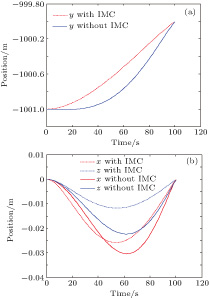
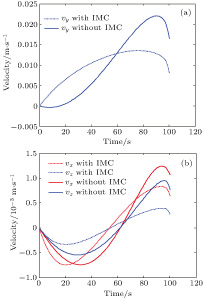
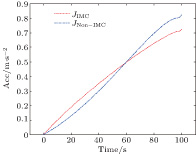
In this scenario, a comparison of IMC and non-IMC control strategies is made to show the effectiveness of the IMC controller. This scenario takes spacecraft S2 as an example. To evaluate the control method effectively, the comparison is made under an identical situation. The two spacecrafts have identical physical characteristics. The parameters of the orbit and spacecraft are given in Tables 2 and 1, respectively. As the relative J2 and atmospheric forces are functions of the relative position, the disturbance accelerations become smaller with decreasing distance. To show the disturbances rejection effect, the initial position is set at the position with zero relative velocity in the LVLH frame. The formation-keeping point is assumed to be located at . The simulation time length is set for 1000 s, and the sampling interval is 1 s. Figure 10 and 11 show the positions and velocity results of the two controllers, respectively. It can be seen that the effect of the IMC controller becomes obvious with disturbances. The convergence with IMC is faster, and the error magnitudes are smaller than those without IMC. The running fuel cost is indicated in Fig. 12. It costs for the non-IMC case and for the IMC case. In the IMC case, the fuel cost is higher in the early phase, but the increasing trend is even. Therefore, the control strategy with IMC is more efficient.
Fig. 12. (color online) Fuel cost of two strategies.
4. Conclusions
A composite control strategy has been proposed for spacecraft proximity operations. The design of the composite controller was divided into three parts. First, the dynamical model was converted into an approximately linear form via the SDC method, and the finite time suboptimal control law was designed based on the SDRE theory. Second, the IMC was integrated to reject the unknown disturbances. Finally, a composite control scheme was obtained by adding the APF control part. Forces in two different directions were generated to enhance the repulsive effect. The formation reconfiguration simulation was conducted to demonstrate the effectiveness of the proposed controller. Two additional comparisons were made to show the enhanced performance in collision avoidance and disturbance rejection.
Reference
1
BrownOEremenkoPBilleM2009Proceedings of 23th Annual conference on small satelliteAugust 10–13, 2009 Logan,Utah, SSC09-I-1
2
D’AmicoSArdaensJ SLarssonR2012Journal of Guidance, Control, and Dynamics35834
3
ScharfD PKeimJ AHadaeghF Y2010IEEE Systems Journal484
4
ClohessyW HWiltshireR S1960Journal of Aerospace Science27653
5
TschauneJHempelP1965Astronautica Acta11104
6
KapilaVSparksA GBuffingtonJ MYanQ2000Journal of Guidance, Control, and Dynamics23561
7
MokS HChoiY HBangH C2010International Journal Aeronautical and Space Sciences11351
8
LiJXiX N2012Journal of Guidance, Control, and Dynamics351709
9
LiuHLiJHexiB2006Aerospace Science and Technology10636
10
LimH CBangH2009Acta Astronaut65112
11
De QueirozM SKapilaVYanQ2000Journal of Guidance, Control, and Dynamics23385
12
JiaHQun-JiaoZ2008Chin. Phys. B17503
13
CimenT2012Journal of Guidance, Control, and Dynamics351025
14
MassariMZamaroM2014Acta Astronaut94409
15
LanQYangJLiSSunH2015Journal of Aerospace Engineering2804014137
16
HeydariABalakrishnanS2013Journal of Guidance, Control, and Dynamics361210
17
StepanyanVHovakimyanN2007Journal of Guidance, Control, and Dynamics301090
18
KumarB SEyerJ K2012Acta Astronaut7761
19
LiJPanYKumarK D2012Journal of Guidance, Control, and Dynamics35309
20
HuangJ1995IEEE Trans. Autom. Control401118
21
HuangJLinC F1994IEEE Trans. Autom. Control391510
22
LeeKSinghS2012Proceedings of AIAA Guidance, Navigation, and Control Conference4693August 13–16, 2012 Minneapolis, Minnesota
23
SauterLPalmerP2012Journal of Guidance, Control, and Dynamics351069
24
FrazzoliEMaoZ HOhJ HFeronE2001Journal of Guidance, Control, and Dynamics2479
MorganDChungS JBlackmoreLAcikmeseBBayardDHadaeghF Y2012Journal of Guidance, Control, and Dynamics351492
34
SchweighartS ASedwickR J2002Journal of Guidance, Control, and Dynamics251073
35
PengQWeiCYou-JianySMing-LieHLuCChing-YueW2012Acta Phys. Sin.61240601in Chinese
36
CimenT2008Proceedings of Proceedings of the 17th World Congress of the International Federation of Automatic Control (IFAC)3761July 6–11, 2008 Seoul, Korea,
37
MracekC PCloutierJ R1998Int. J. Robust Nonlinear Control8401
38
HeydariABalakrishnanS N2013Journal of Guidance, Control, and Dynamics361210
39
NguyenTGajicZ2010IEEE Trans. Autom. Control55191
40
HeydariABalakrishnanS2015Int. J. Robust Nonlinear Control252687











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}