Cooperatively surrounding control for multiple Euler–Lagrange systems subjected to uncertain dynamics and input constraints
Chen Liang-Ming, Lv Yue-Yong, Li Chuan-Jiang†,  , Ma Guang-Fu
, Ma Guang-Fu
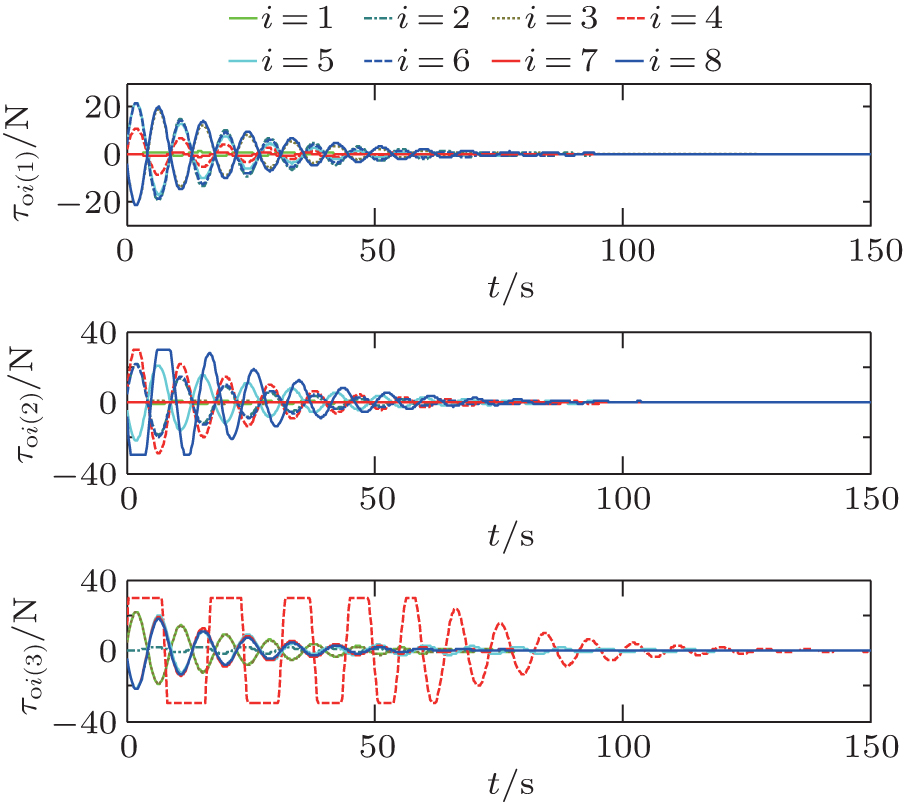
, Ma Guang-Fu Control forces of agents using NNCSC.