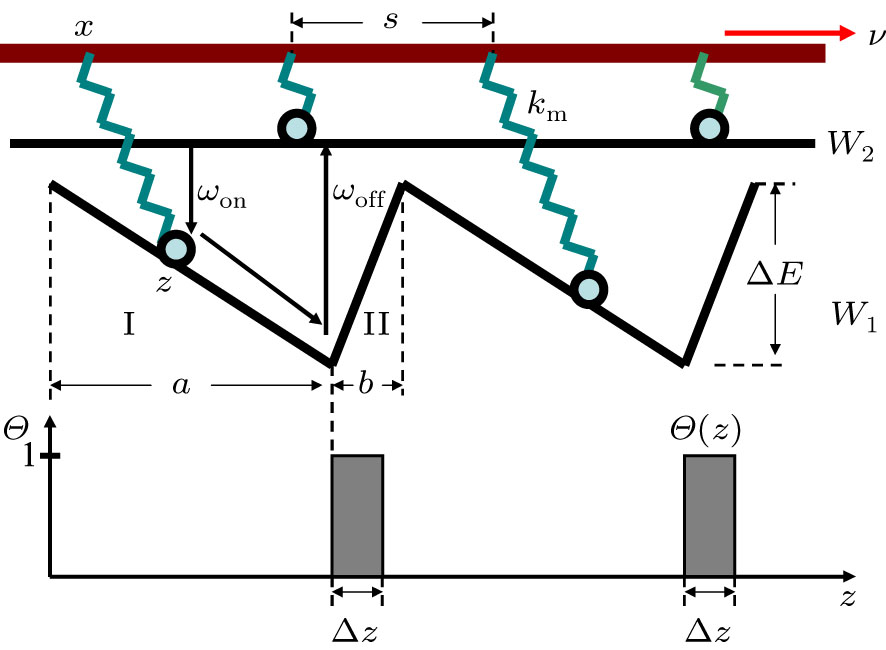
Schematic diagram of a two-state multi-motor system and the rate of ATP excitations ΩΘ(z). Motors are attached periodically with spacing s via springs to a backbone, and the motor heads can transit between two states 1 and 2, with l-periodic (l = a + b) potentials W1 and W2, respectively. x denotes the position of the binding point of a given motor tail on the backbone, and z denotes the position of the motor head at state 1 or 2. The transition rate ωon is a constant. ATP excitations, ωoff(z) = ΩΘ(z), occur only within an interval of width Δz, where Θ(z) = 1. |
 , Li Qi-Kun, Xing Jian-Jun, Wang Guo-Dong
, Li Qi-Kun, Xing Jian-Jun, Wang Guo-Dong