
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
A divertor plasma configuration design method for tokamaks
[Guo Yong1, Xiao Bing-Jia1, 2, Liu Lei1, †,  , Yang Fei3, Wang Yuehang4, Qiu Qinglai1]
, Yang Fei3, Wang Yuehang4, Qiu Qinglai1]
, Yang Fei3, Wang Yuehang4, Qiu Qinglai1]
|
|


† Corresponding author. E-mail:
Project supported by the National Magnetic Confinement Fusion Research Program of China (Grant Nos. 2014GB103000 and 2014GB110003), the National Natural Science Foundation of China (Grant Nos. 11305216, 11305209, and 11375191), and External Cooperation Program of BIC, Chinese Academy of Sciences (Grant No. GJHZ201303).
The efficient and safe operation of large fusion devices strongly relies on the plasma configuration inside the vacuum chamber. It is important to construct the proper plasma equilibrium with a desired plasma configuration. In order to construct the target configuration, a shape constraint module has been developed in the tokamak simulation code (TSC), which controls the poloidal flux and the magnetic field at several defined control points. It is used to construct the double null, lower single null, and quasi-snowflake configurations for the required target shape and calculate the required PF coils current. The flexibility and practicability of this method have been verified by the simulated results.
The efficient and safe operation of large fusion devices relies on the proper plasma configuration inside the vacuum chamber. For the plasma configuration design, we should consider the following aspects: (i) maintaining adequate clearance from the chamber wall to avoid high density of power and particle deposition, (ii) close to the passive plate to ensure adequate passive stabilization, (iii) coupling with the antenna for efficient radio frequency (RF) heating, (iv) reducing the MHD activity, (v) optimizing the magnetic field around the strike point to reduce heat deposition, and so on.[1] So, it is important to develop a method to design the plasma configuration, especially for the detail feature of the divertor configuration.
The tokamak simulation code (TSC)[2,3] is a numerical model of the axisymmetric tokamak plasma and the associated control systems. It evolves the magnetic field in a rectangular computational domain using the Maxwell MHD equations for the plasma, coupled through the boundary conditions to the circuit equations for the poloidal field (PF) coils. The TSC code could be used for the static equilibrium calculation while the evolution calculation is switched off. In the original code, the plasma position could only be controlled by the plasma radial and vertical position through the ‘observation pair’ control method. The other configuration parameters, such as the elongation, triangularity, strike point, and so on, are decided by the preprogrammed currents, which are adjusted manually. It is time-consuming and less efficient. Sometimes, it is difficult to get the desired configuration exactly.
In order to solve this problem, a shape constraint module has been developed in the TSC code to construct the configuration. The work is briefly introduced in Section 1. Section 2 gives the original TSC model for the static equilibrium calculation. In the TSC code, the shape constraint module has been developed and used for the Experimental Advanced Superconducting Tokamak (EAST) divertor configuration design. The results of double null, lower singular null, and quasi-snowflake configuration are given in Section 3. Finally, the conclusion is given in Section 4.
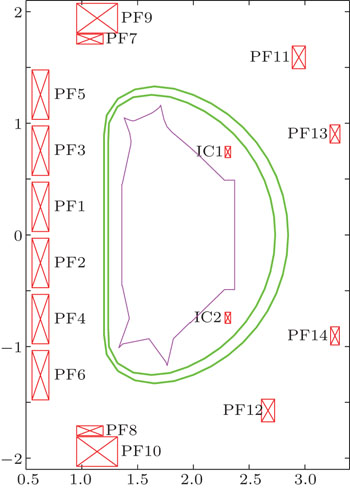
EAST[4] is a full superconducting tokamak with D-shaped cross-section, as shown in Fig.
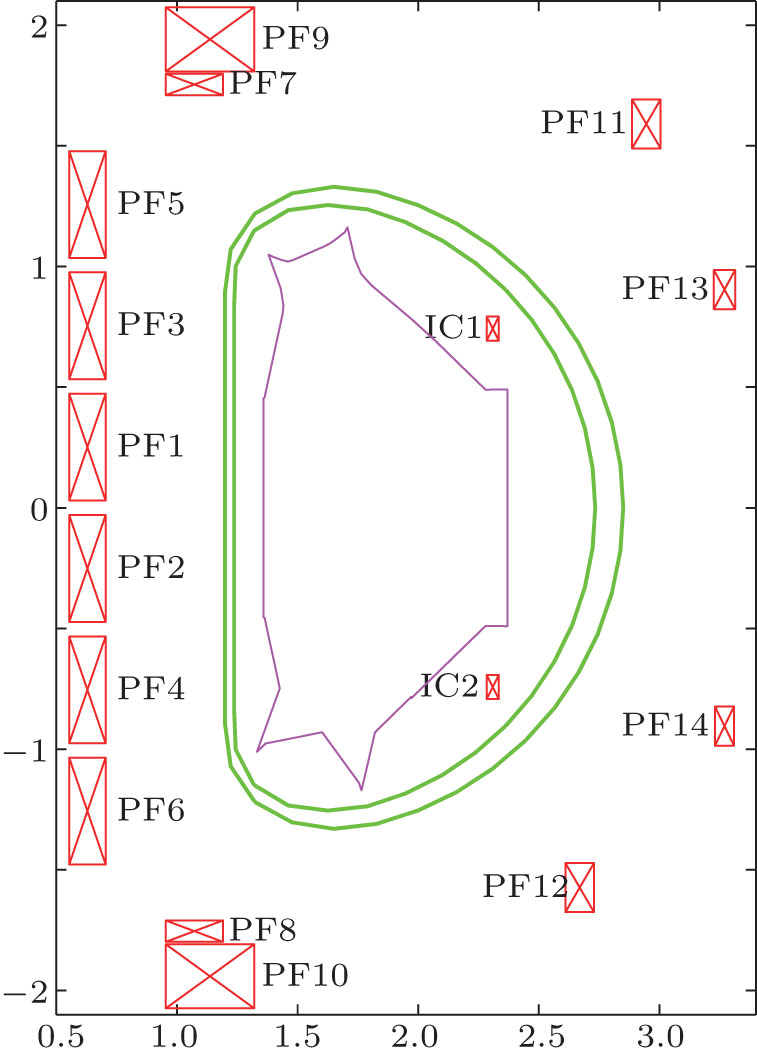 | Fig. 1. EAST geometry poloidal field (PF) locations and sizes are signed by red rectangle boxes, the double layer vacuum vessels are signed by green lines. |
| Table 1. PF coils geometry and turns in R and Z directions. . |
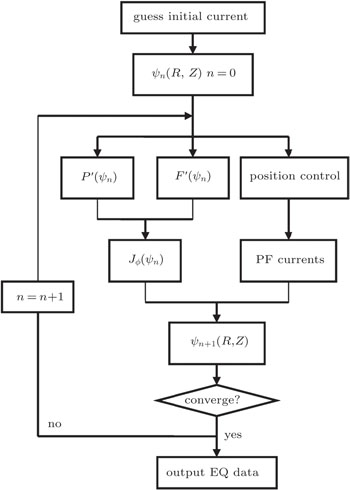
The diagram of TSC static equilibrium calculation is shown in Fig.



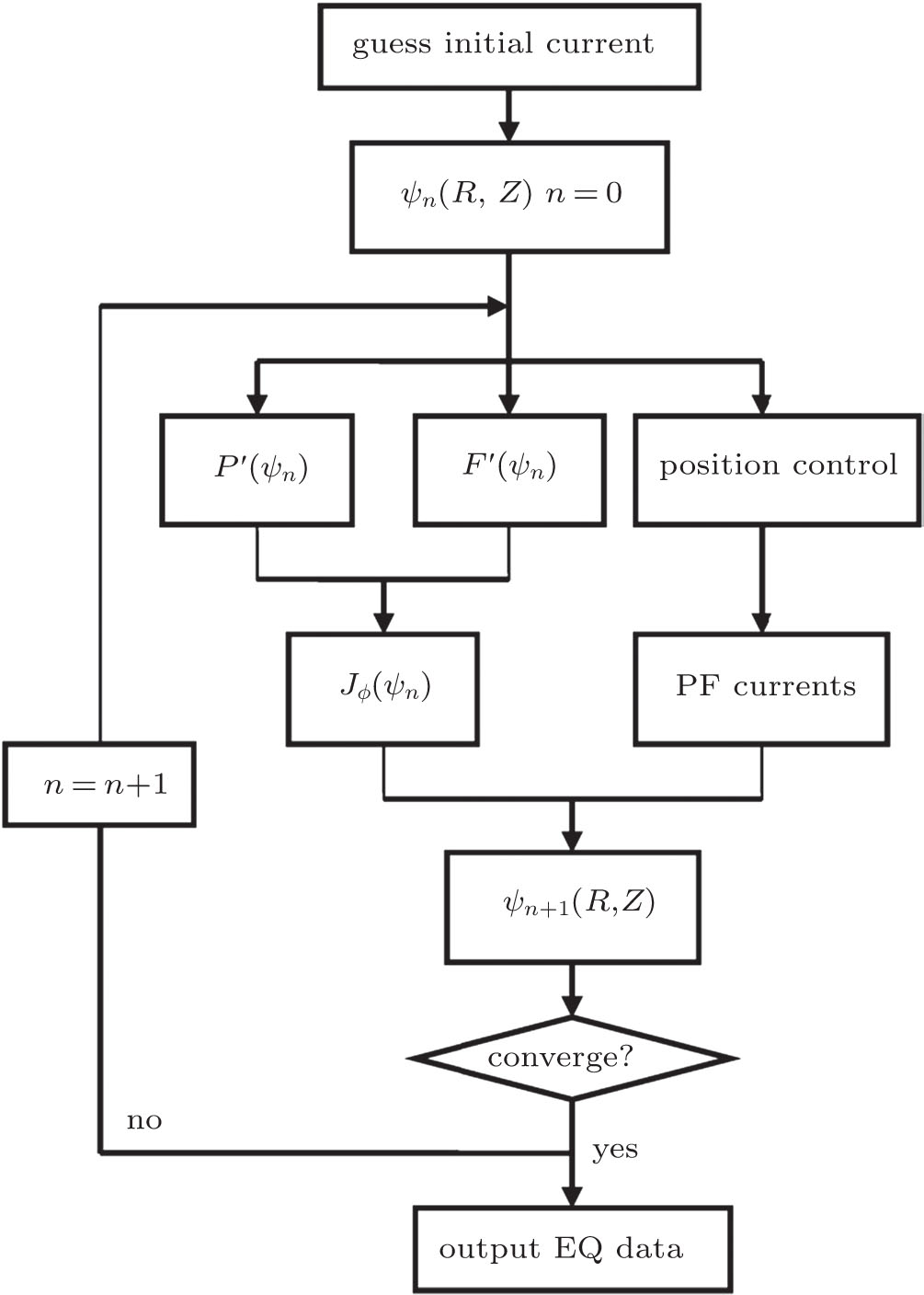 | Fig. 2. Iteration loop for the plasma equilibrium construction. |
The plasma position is controlled by the observation pair method, which makes the two points of the observation pair at the same poloidal flux surface by correcting the PF current as follows:







With the updated plasma current and PF currents, the poloidal flux distribution is renewed by solving the equation



In order to improve the efficiency and accuracy of the configuration design, a shape constraint module has been built in the TSC code. Besides the basic radial and vertical position control, the plasma configuration is shaped by constraining the poloidal flux and magnetic field at several special positions. In this section, the shape constraint module is introduced for the double null (DN), lower single null (LSN), and quasi-snowflake (QSF) configurations and several design results are given.
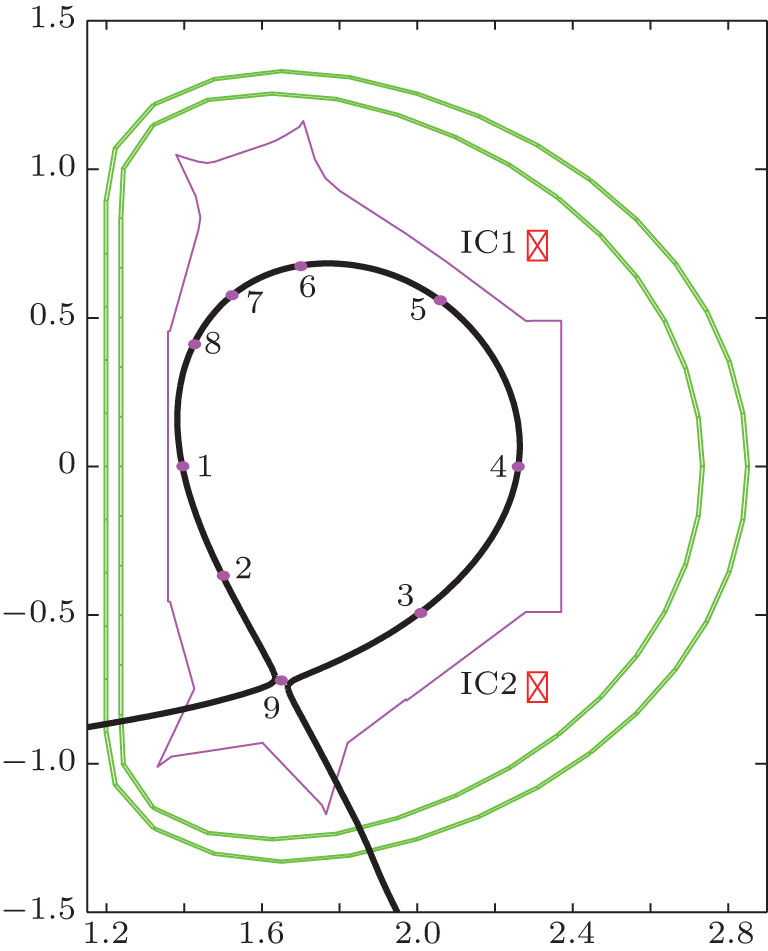
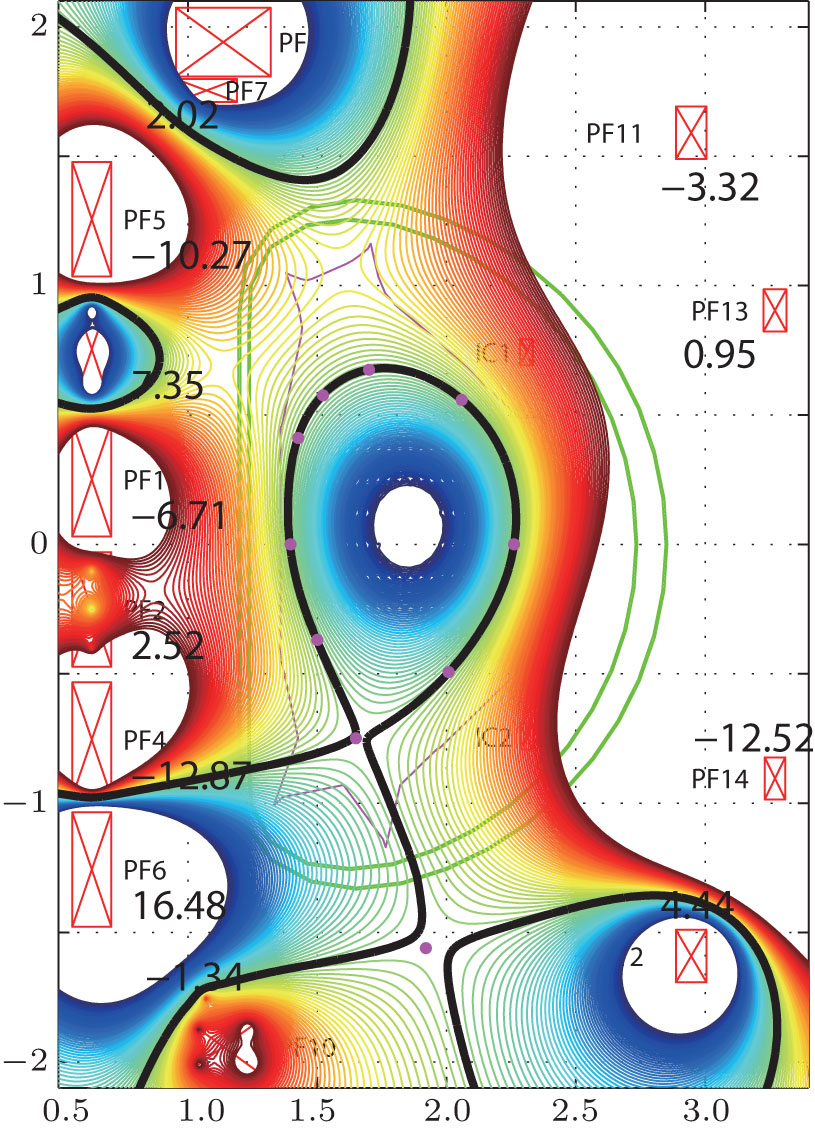
The double null configuration has two active X-points (upper and lower X-points) with the same poloidal flux, i.e., plasma boundary flux ψbdry. As shown in Fig.
 | Fig. 3. The control points for the DN plasma configuration design. |
The total corrected PF current for the shape constrain is 
As we know, the poloidal flux and the magnetic field change due to the PF current can be represented as





Table
| Table 2. With preprogrammed PF current, TSC constructs the DN configuration with corrected PF current. . |
 | Fig. 4. With the preprogrammed PF current listed in Table |
By using the new shape constraint method, for case 1 in Table
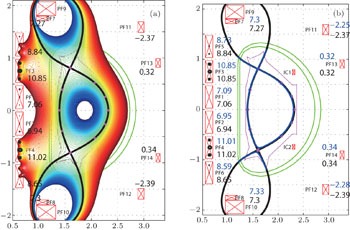
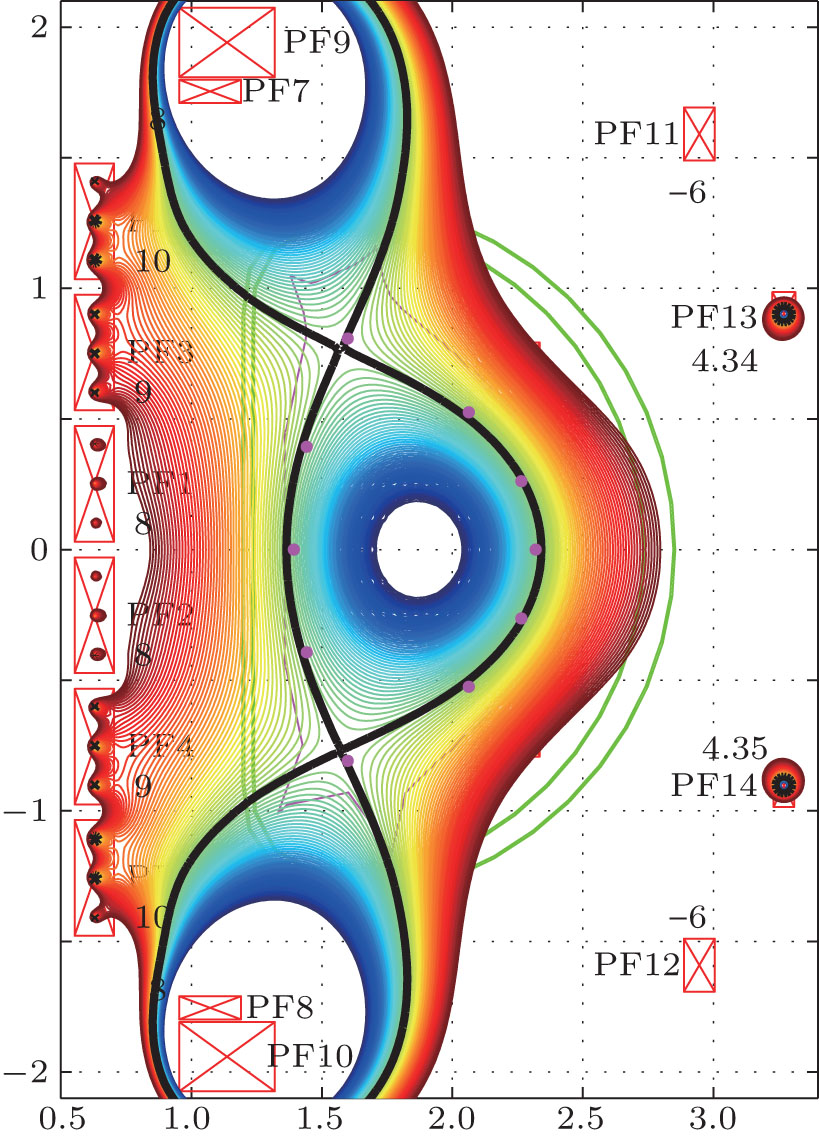
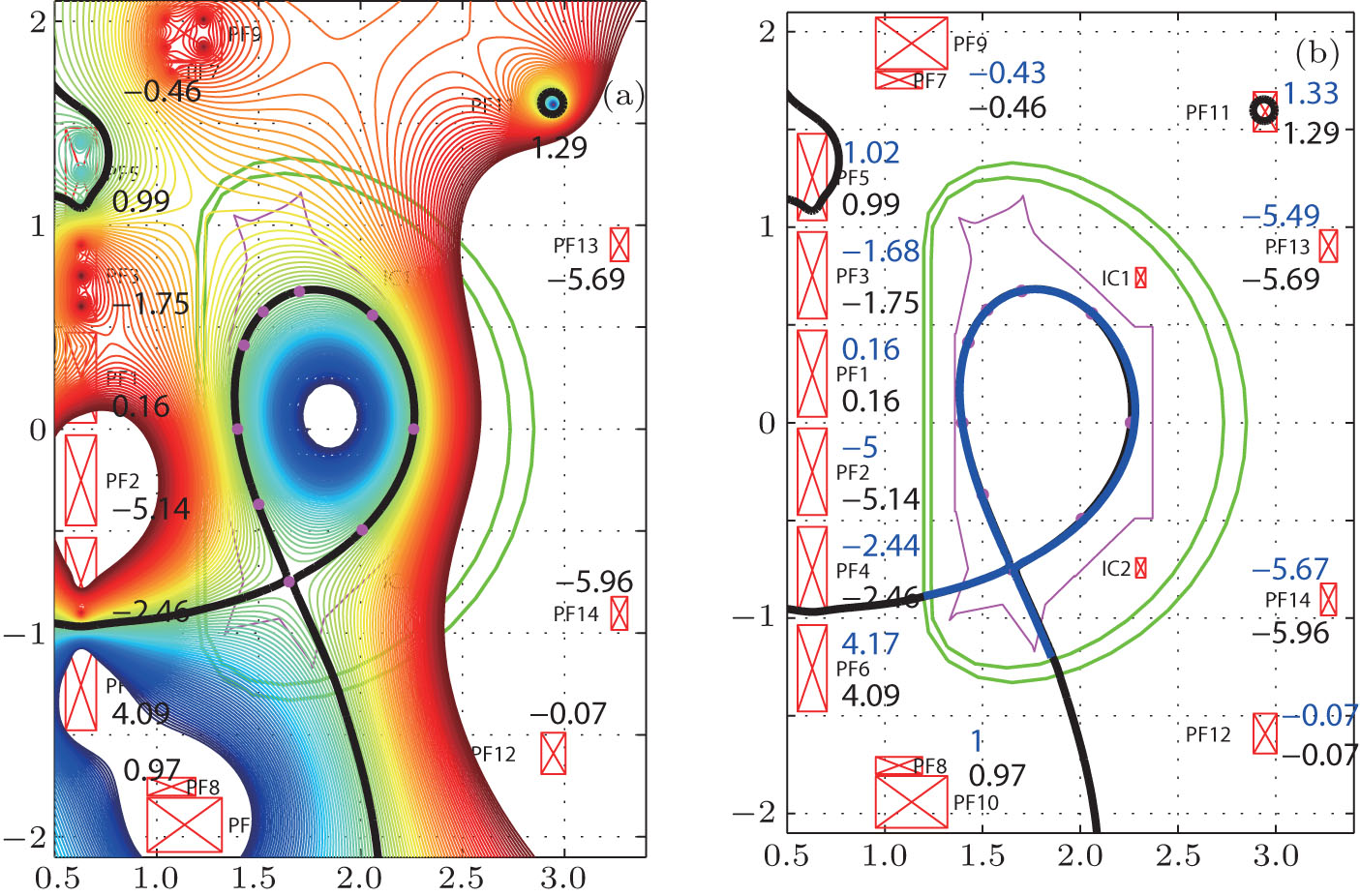
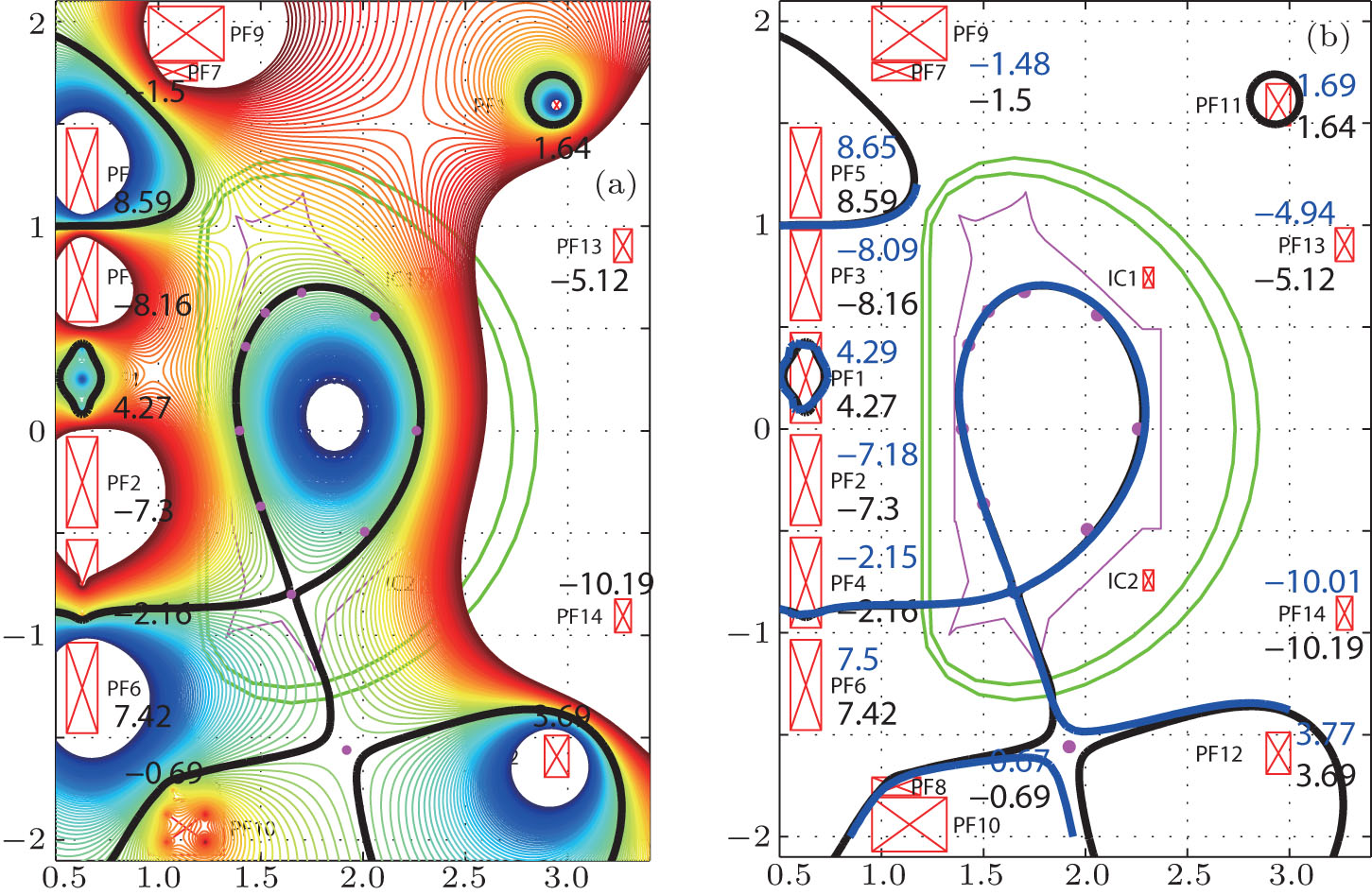
 | Fig. 5. (a) The TSC constructed plasma equilibrium with boundary flux ∼ −0.6962 Wb/rad (case 1 in Table |
In order to check the flexibility of the flux-linkage shift, case 2 with −0.0036 Wb/rad (target: 0.0 Wb/rad) and case 3 with 0.5912 Wb/rad (target 0.60 Wb/rad) are shown in Fig.
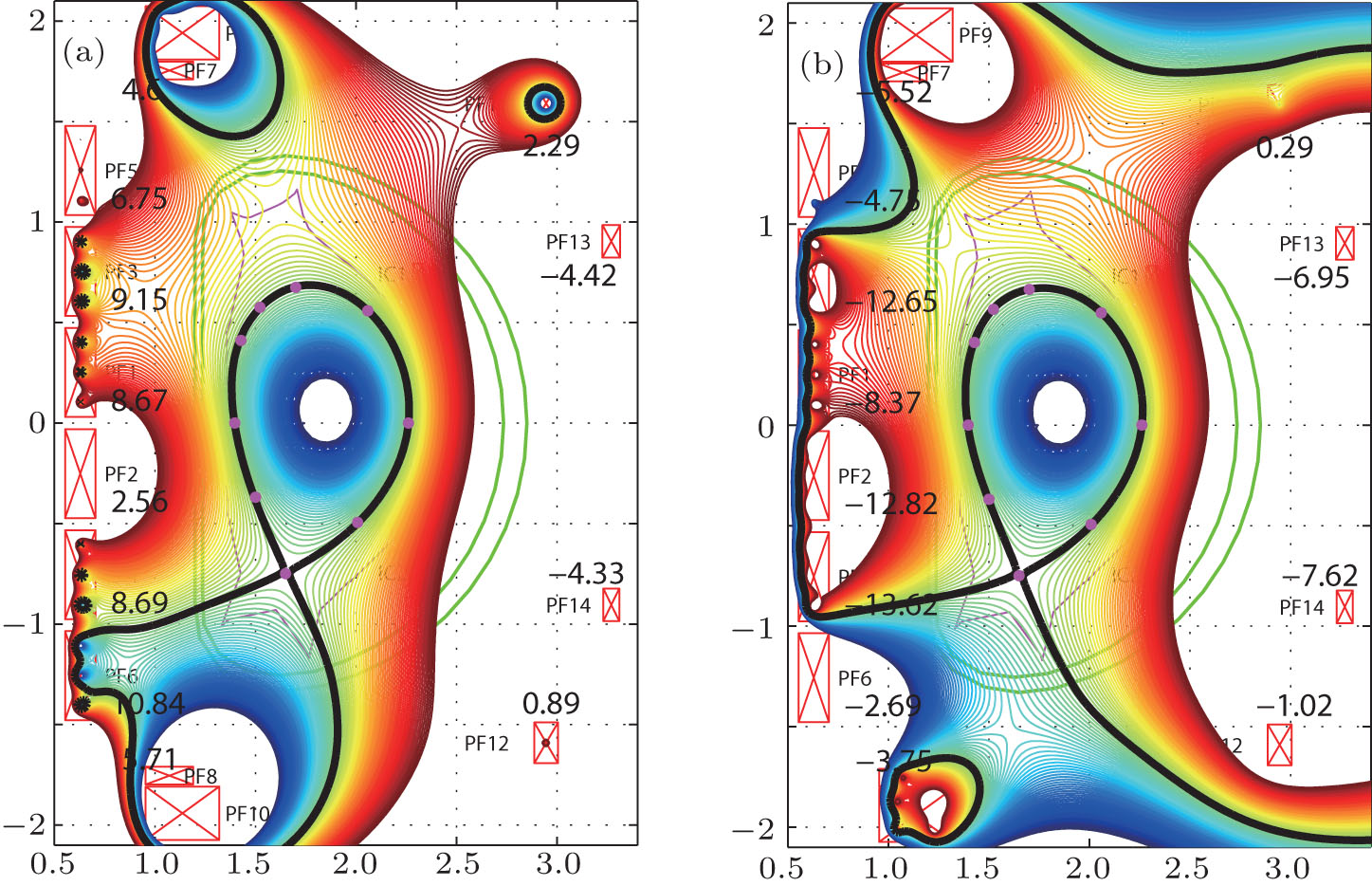
 | Fig. 6. The constructed plasma equilibrium with flux-linkage at the plasma boundary equal to −0.0036 Wb/rad ((a) case 2 in Table |
The lower single null configuration has one active X-point at the lower plane with the plasma boundary flux ψbdry. Take the case in Fig.
 | Fig. 7. The control points for the LSN plasma configuration design. |
The calculation of
| Table 3. With preprogrammed PF current, TSC constructs the LSN configuration with corrected PF current. . |
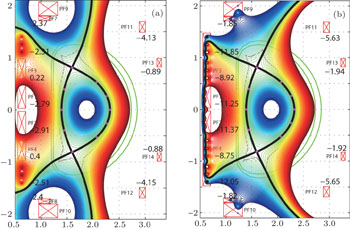
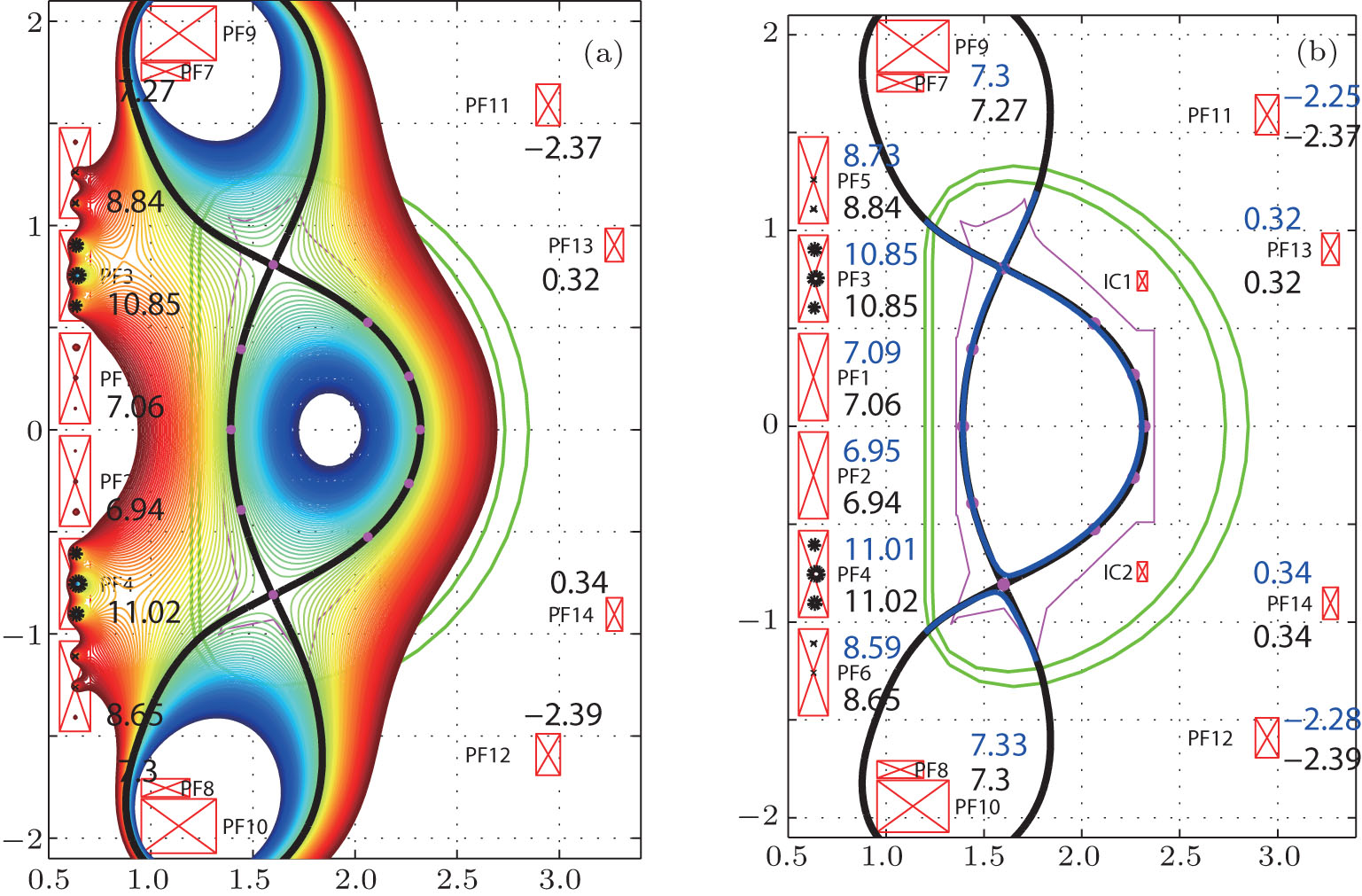
 | Fig. 8. (a) The TSC constructed plasma equilibrium with boundary flux ∼ 0.0046 Wb/rad (case 1 in Table |
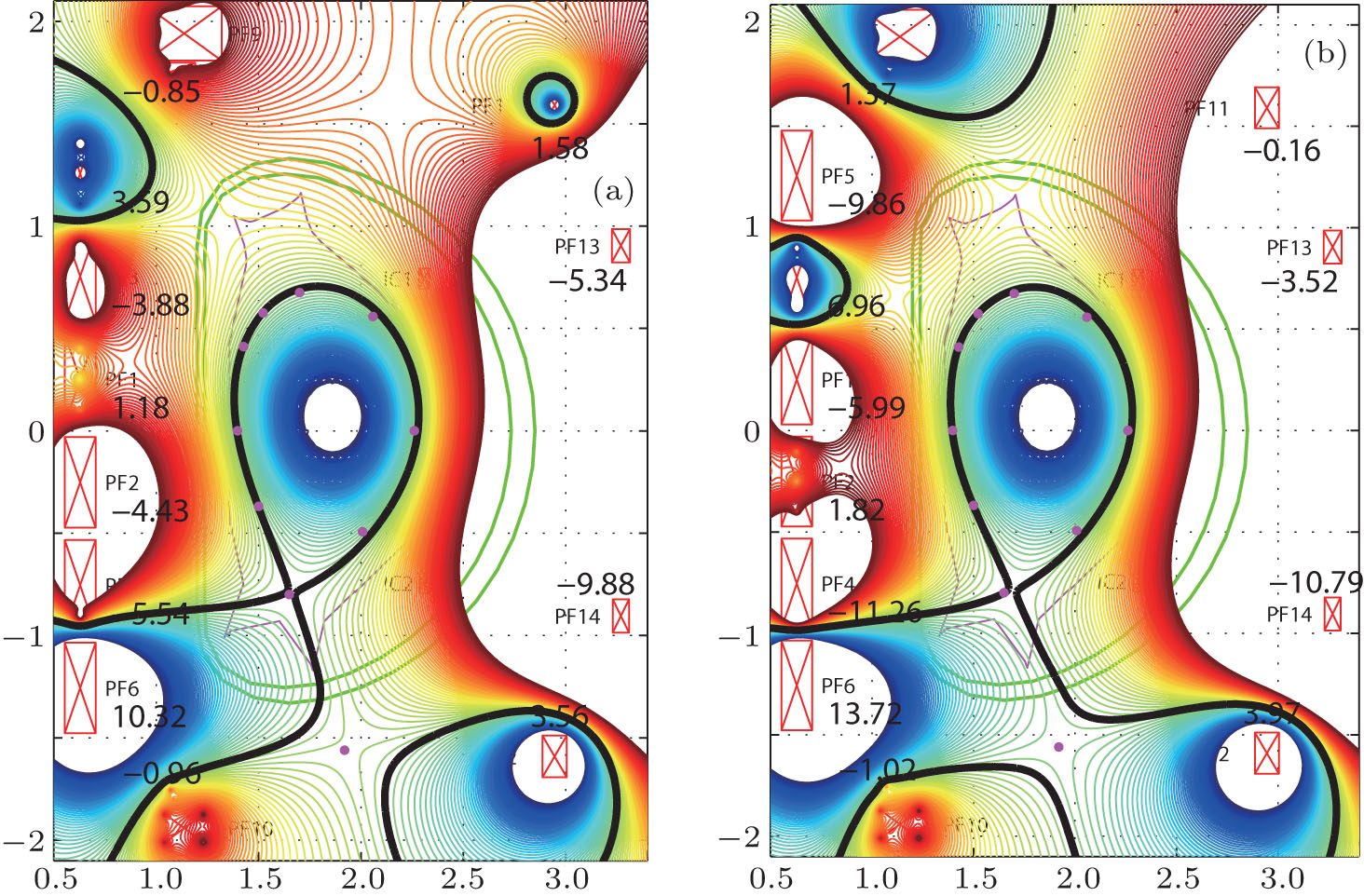
Furthermore, the same plasma shapes with −0.5946 Wb/rad (target: −0.6 Wb/rad) and 0.6038 Wb/rad (target: 0.6 Wb/rad) are easily constructed by this method, as shown in Fig.
 | Fig. 9. The constructed plasma equilibrium with flux-linkage at plasma boundary equal to −0.5946 Wb/rad ((a) case 2 in Table |
Reducing heat load on the divertor plates is one of the most challenging works for a tokamak reactor. Some advanced configurations with a stronger flaring of poloidal field in the divertor, such as snowflake divertor configuration (SFD), have been proposed.[7,8] SFD requires not only the first-order null point as the usual divertor configuration (i.e., Bp = 0), but also the second-order derivative of the poloidal flux to be zero (i.e., ∇2ψp = 0). Due to the limitation of the PF coils ability, EAST could only operate with the quasi-snowflake (QSF) configuration with Ip ≤ 250 kA.[9–11]
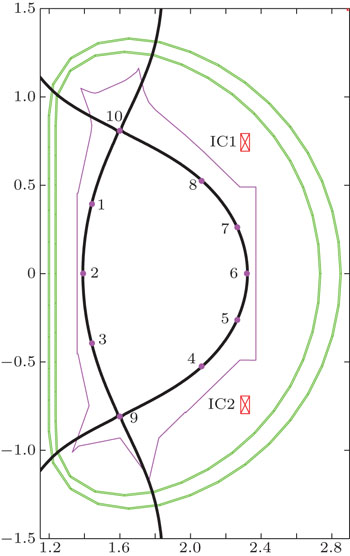
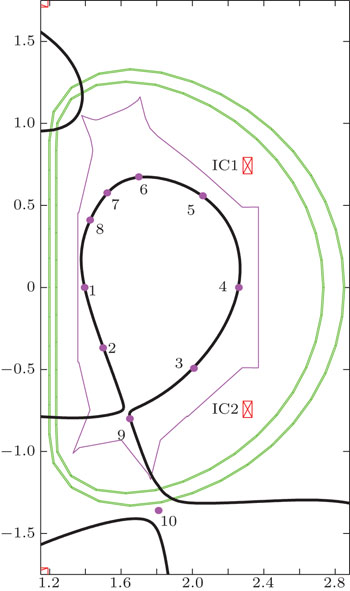
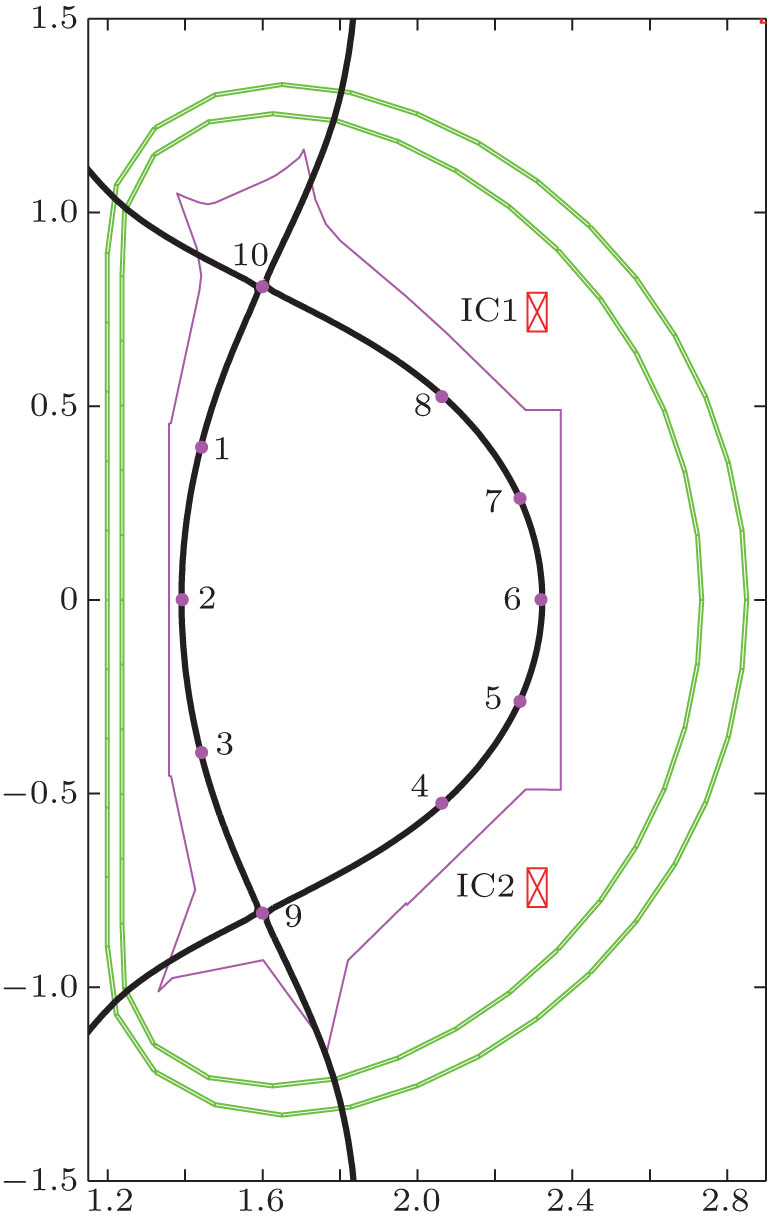
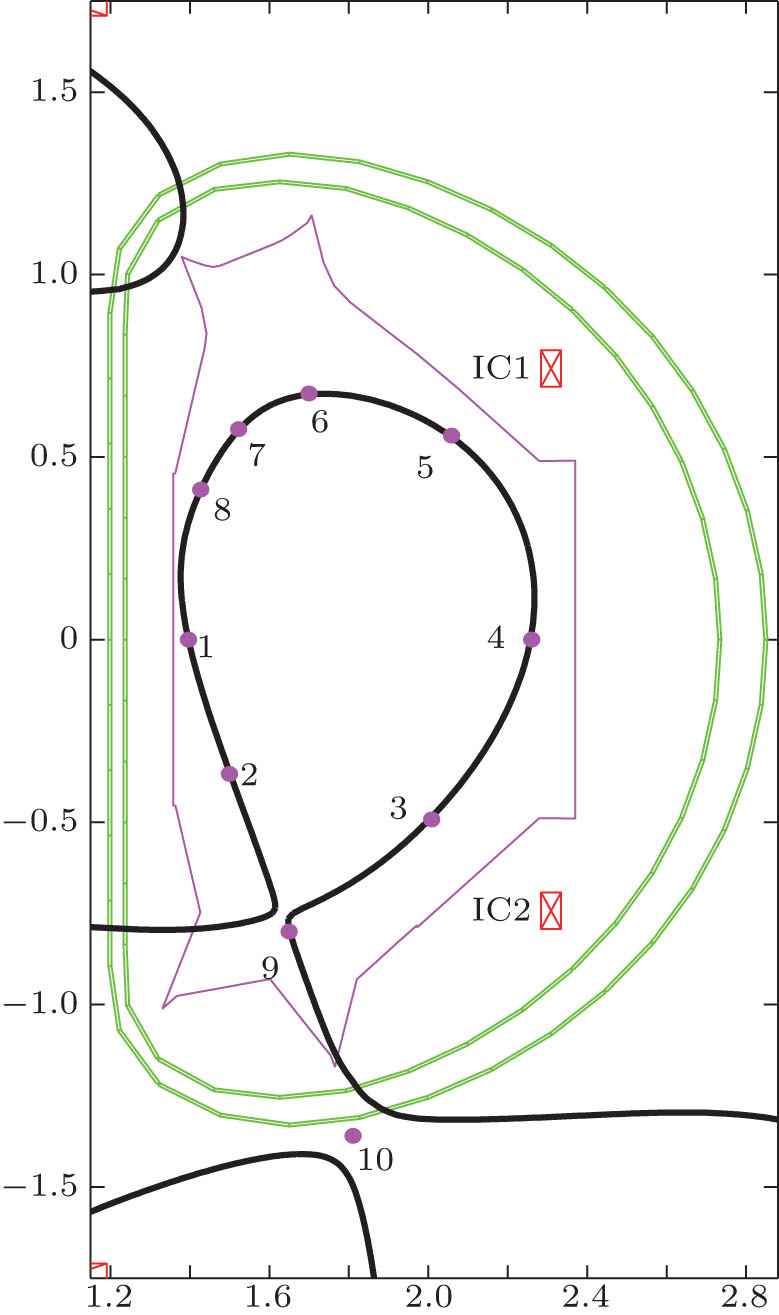 | Fig. 10. QSF configuration target with 10 selected control points to sign the outline of the shape. |
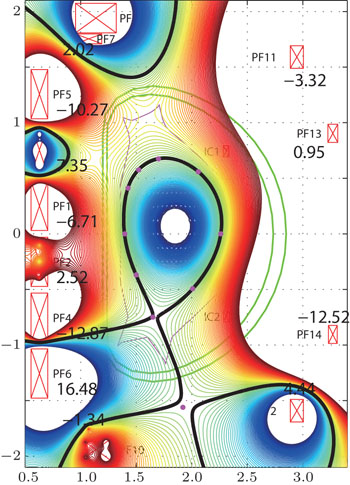
Different from the standard SFD configuration, QSF has a second X point (X2 point) close to the active X point. Through changing the position of the X2 point, we could obtain different flux expansion and strike point. In EAST, the PF system is not designed for the snowflake configuration. There are only 3 coils (PF6, PF8/10, and PF12) to shape the poloidal flux distribution near the divertor region. Comparing with the LSN configuration, the QSF configuration is constructed by increasing PF6 and PF12 currents, and decreasing PF8/10 current. Obviously, PF6 has a strong effect on the plasma low triangularity, PF8/10 decides the plasma elongation, and PF12 takes part in the control of plasma radial and vertical position with PF11, PF13, and PF14. To maintain the bulk plasma body, the other PF currents are modified to offset the impact. In the original method, we could only control the radial and vertical position, and tune the 12 PF preprogrammed currents by hand close to the desired configuration.[11] It is very inconvenient for the QSF configuration design.
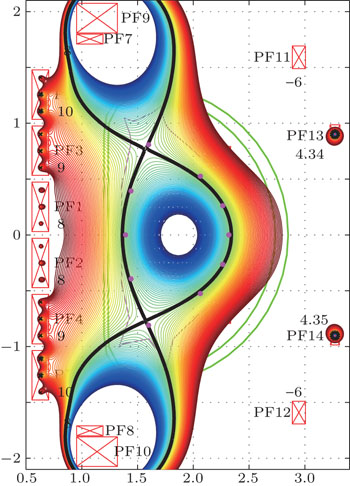
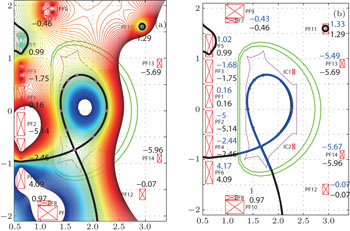
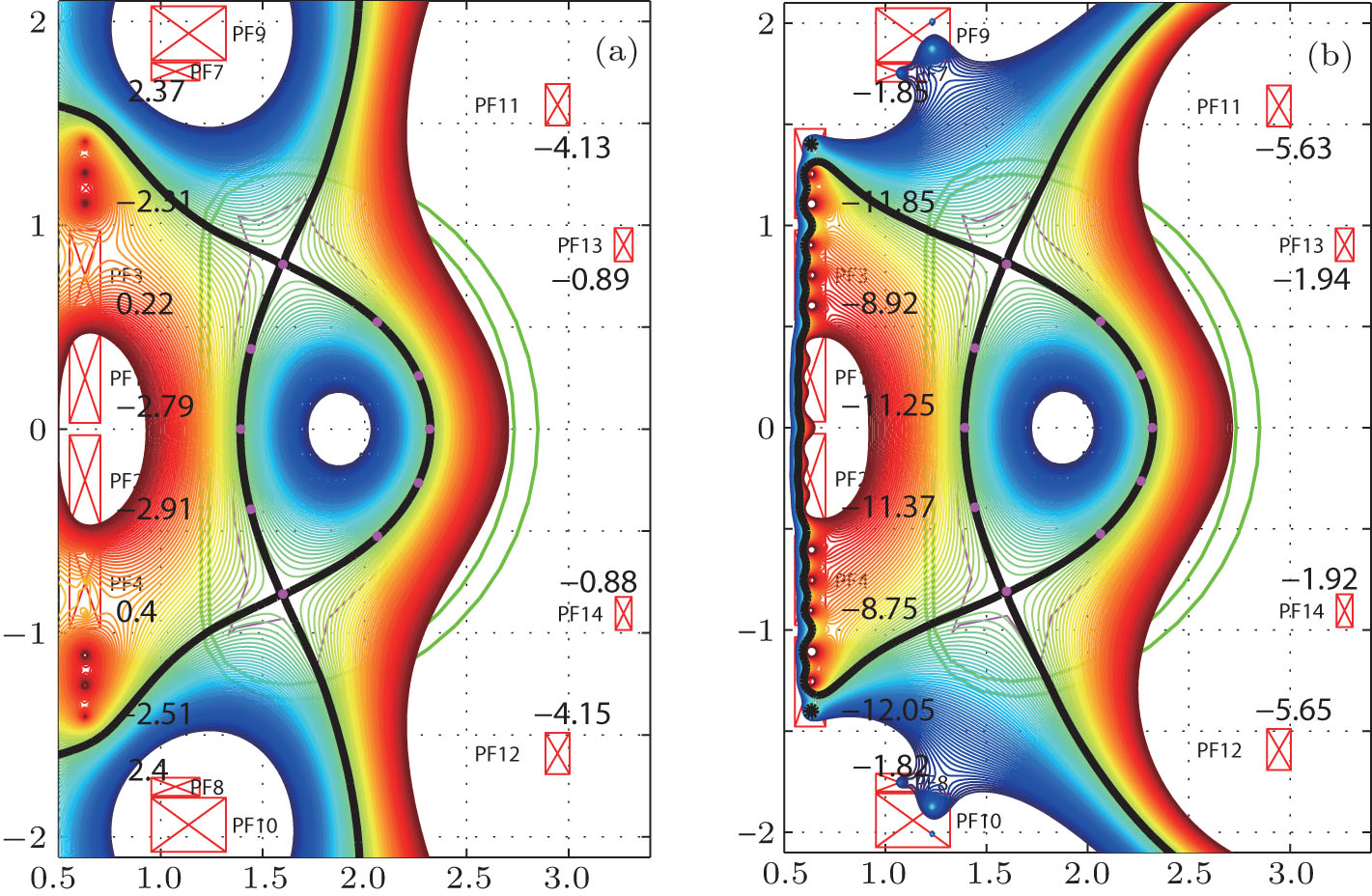
 | Fig. 11. The flux-linkage at the plasma boundary is set to zero. The constructed QSF configuration with all offset fluxes being zero (case 1 in Table |
Figure
Normally, points 1–8 should be confined at the plasma boundary as 

As the former, the preprogrammed PF currents are set the same as those in the DN case (see Table
| Table 4. With preprogrammed PF current, TSC constructs the QSF configuration with corrected PF current. . |
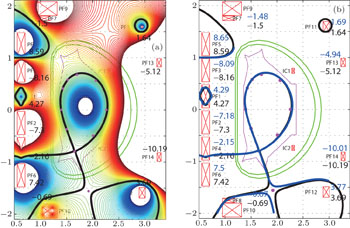
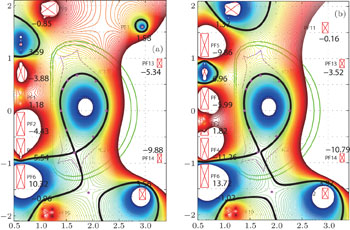
 | Fig. 12. (a) The TSC constructed QSF equilibrium with −0.03 Wb offset fluxes at 3rd, 4th, and 5th points (case 2 in Table |
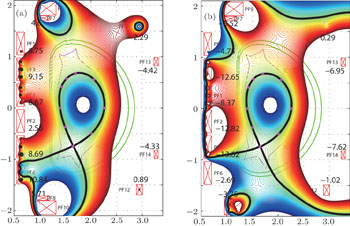
Of course, we could add a strike point as a control point, like points 1–8, and make its poloidal flux the same as the plasma boundary flux. The strike point could also be shifted through different 


 | Fig. 13. The flux-linkage at the plasma boundary is set to zero. (a) The case of |
In the TSC code, a shape constraint module has been developed. Comparing with the original method, it could quickly construct the divertor plasma equilibrium with the desired configuration. The plasma equilibrium with desired flux-linkage at the plasma boundary could be easily constructed, which could be used to scan the range of flux-linkage for the desired plasma configuration. Through setting a small offset flux at some special control point, the plasma configuration could make a small change which would reduce the cost of PF current dramatically. The designed results of DN, LSN, and QSF configurations prove the flexibility and practicability of this method, which has the potential for divertor configuration design in other tokamak.
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 |