Generalized Birkhoffian representation of nonholonomic systems and its discrete variational algorithm
Liu Shixing1, Liu Chang1, †,  , Hua Wei2, Guo Yongxin3
, Hua Wei2, Guo Yongxin3
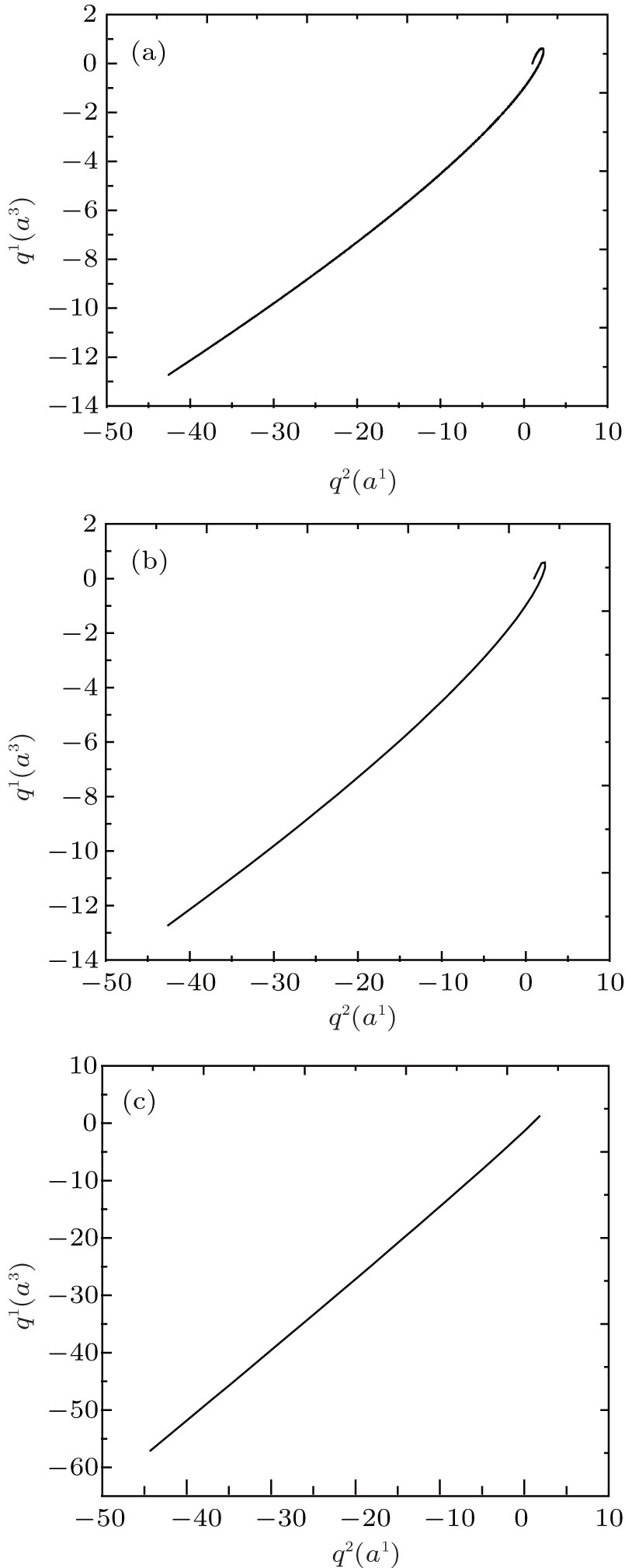
, Hua Wei2, Guo Yongxin3 The motion curve of system subjected to
Generalized Birkhoffian representation of nonholonomic systems and its discrete variational algorithm |
|
Liu Shixing1, Liu Chang1, †,
, Hua Wei2, Guo Yongxin3 |
The motion curve of system subjected to |
| |