{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Prompt efficiency of energy harvesting by magnetic coupling of an improved bi-stable system
[Li Hai-Tao, Qin Wei-Yang†,  ]
]
]
|
|


† Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant No. 11172234) and the Scholarship from China Scholarship Council (Grant No. 201506290092).
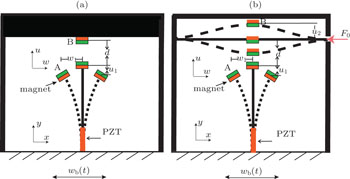
In order to improve the transform efficiency of bi-stable energy harvester (BEH), this paper proposes an advanced bi-stable energy harvester (ABEH), which is composed of two bi-stable beams coupling through their magnets. Theoretical analyzes and simulations for the ABEH are carried out. First, the mathematical model is established and its dynamical equations are derived. The formulas of magnetic force in two directions are given. The potential energy barrier of ABEH is reduced and the snap-through is liable to occur between potential wells. To demonstrate the ABEH’s advantage in harvesting energy, comparisons between the ABEH and the BEH are carried out for both harmonic and stochastic excitations. Our results reveal that the ABEH’s inter-well response can be elicited by a low-frequency excitation and the harvester can attain frequent jumping between potential wells at fairly weak random excitations. Thus, it can generate a higher output power. The present findings prove that the ABEH is preferable in harvesting energy and can be optimally designed such that it attains the best harvesting performance.
The rapid advancement in low-power electrical systems such as sensors in recent decades has led to the great increase of the requirement for the technology of self-power. Harvesting energy from an ambient vibration has attracted considerable interest because it could provide electrical energy for sensors and other micro-electrical devices in a portable and sustainable way.
Among different energy transduction mechanisms, piezoelectric energy harvesters show superior conversion efficiency and can be manufactured in both micro-scale and macro-scale. Initially, studies of the vibration-based energy harvester adopted the linear resonance theory. However, the vibrations existing in most environments are made up of a number of frequencies instead of a single frequency, the linear energy harvester becomes incapable of efficiently harvesting in this environment.[1–3]
To overcome the defect of the narrow bandwidth of linear harvesters, various approaches have been proposed to broaden the bandwidth, e.g., oscillator arrays and active frequency tuning method.[4,5] Another significant improvement in broadening the bandwidth is achieved by introducing nonlinearity, such as mono-stability,[6–9] bi-stability,[10–14] tri-stability,[15–17] and impact,[18] into the design of energy harvesters. Stanton et al.[19] studied the piezoelectric bi-stable harvester and provided the mathematical expression of magnetic repulsion force. Erturk et al.[20] extended the application of the bistable mechanism of Moon[21] to improve the energy harvesting performance and reported that an order of power output over the linear system without magnets. Wang et al.[22] proposed an elastic magnifier to magnify the base vibration displacement to enhance the output characteristic of the bistable oscillator. Zhou et al.[23] investigated the piezomagnetic harvester for enhancing broadband frequency response by altering the angle of two external magnets. Fan et al.[24] improved the performance of piezoelectric energy harvester by using the magnetic coupling of two cantilever beams.
Since the ambient vibration source generally includes many frequency components, even a continuous spectrum in the frequency domain, a few researchers have investigated energy harvesting under stochastic excitation. Litak et al.[25] used numerical methods to investigate the performance of a bistable energy harvester under random excitation and the results showed that the system can attain stochastic resonance. Li et al.[26] undertook numerical and experimental investigations on the stochastic resonance of a tri-stable harvester, and the results demonstrated that it has a better performance compared with the bistable energy harvester under stochastic excitations.
For a bi-stable energy harvester system, broadband excitations may induce its response to take a nearly regular jump between two stable positions (coherence resonance), for which the signal to noise ratio will yield a peak.[27,29] Cao et al.[30] found that the threshold of inter-well oscillation of a bi-stable configuration was dependent on the depth of potential wells. Hosseninloo et al.[31] studied an energy harvester with an adaptive bistable potential, which can be adjusted by an adaptive controller. However, this strategy needs to consider the balance between the energy consumed by the controller and that generated by piezoelectric patches.
This paper presents a new idea to reduce the potential barrier in BEH and elicit the occurrence of snap-through under low-intensity excitation. The rest of this paper is organized as follows. In Section 2, an electromechanical model of the advanced bi-stable energy harvester (ABEH) is established and analytically studied by using the extended Hamilton’s principle. In Section 3, numerical simulations are carried out to analyze the dynamical response under deterministic and stochastic excitations. The results validate that the ABEH can work more efficiently than its conventional bi-stable counterpart. The summary is finally concluded in Section 4.
Figure
 | Fig. 1. (a) Traditional bi-stable energy harvester; (b) advanced bi-stable energy harvester. |
In the following analysis, subscripts 1 and 2 refer to the cantilever beam and the clamped beam, respectively, Ek1 and Ek2 denote the kinetic energies of the cantilever beam and the clamped beam, respectively. Then, the total kinetic energy can be given by

Considering the effect of electromechanical coupling, the potential energy of the whole system is

The virtual works done by non-conservative forces are

For the cantilever and clamped beams, their magnets’ masses and positions are likely to induce the first modes of the beams; i.e., for vibrations of the two beams the first modes will be the dominant. Let ψ1 and ψ2 represent the first modes of the cantilever and clamped beams, respectively. Then, the displacement of the cantilever beam at y can be expressed as


Considering the boundary conditions, ψ1(y) and ψ2(x) should take the following forms:[10,32]



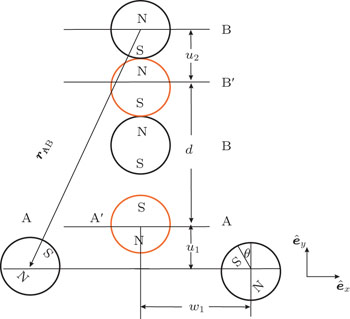
As shown in Fig.


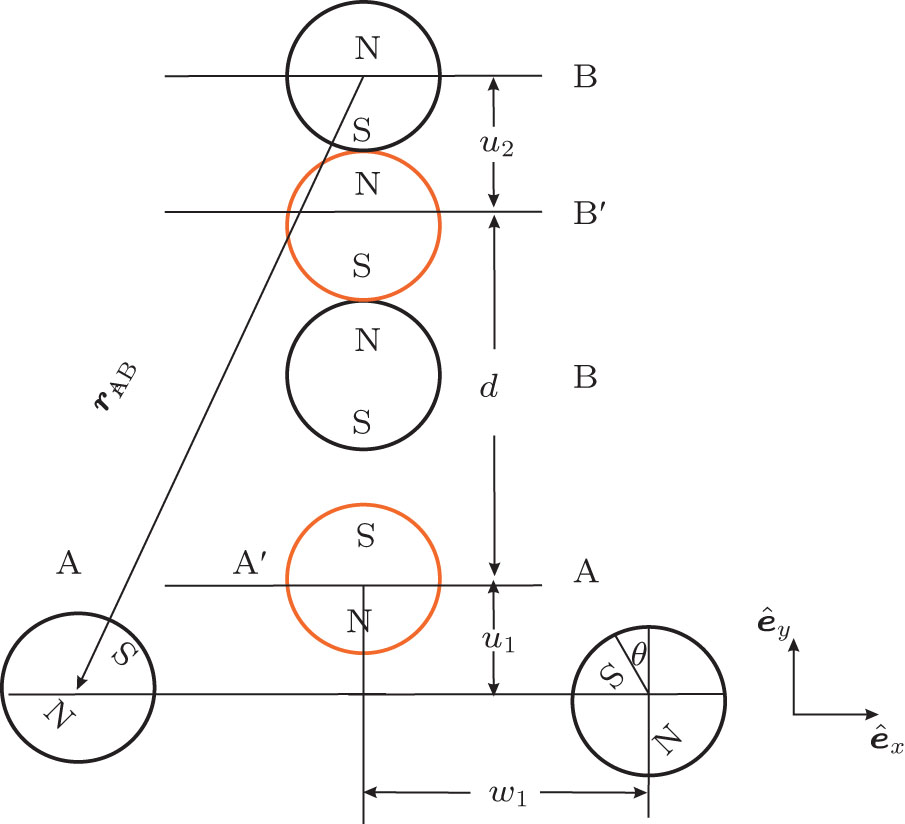 | Fig. 2. Geometric diagram of magnetic dipoles. |
Based on orthogonal decomposition, the magnetic dipole moment vectors take the following forms:[19]

The magnetic field of dipole B acting on dipole A is given by

Thus, the potential energy of magnetic field can be written as

The equivalent magnetic force can be obtained by

From Lagrange equation, the dynamical governing equations of the proposed system can be derived as follows:

For the BEH’s governing equation, we can derive it by letting u2 = 0; i.e., the clamped beam is considered as a rigid one. Thus the BEH’s governing equation is
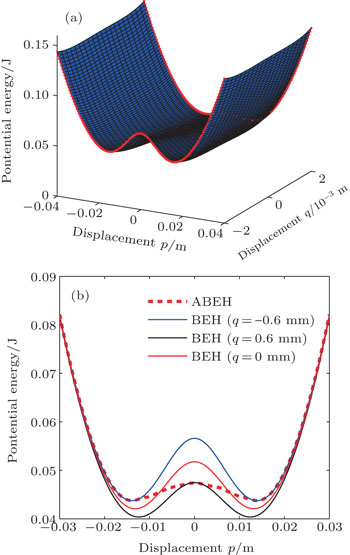
The stability of the system is determined by the position of magnets A and B. Figure
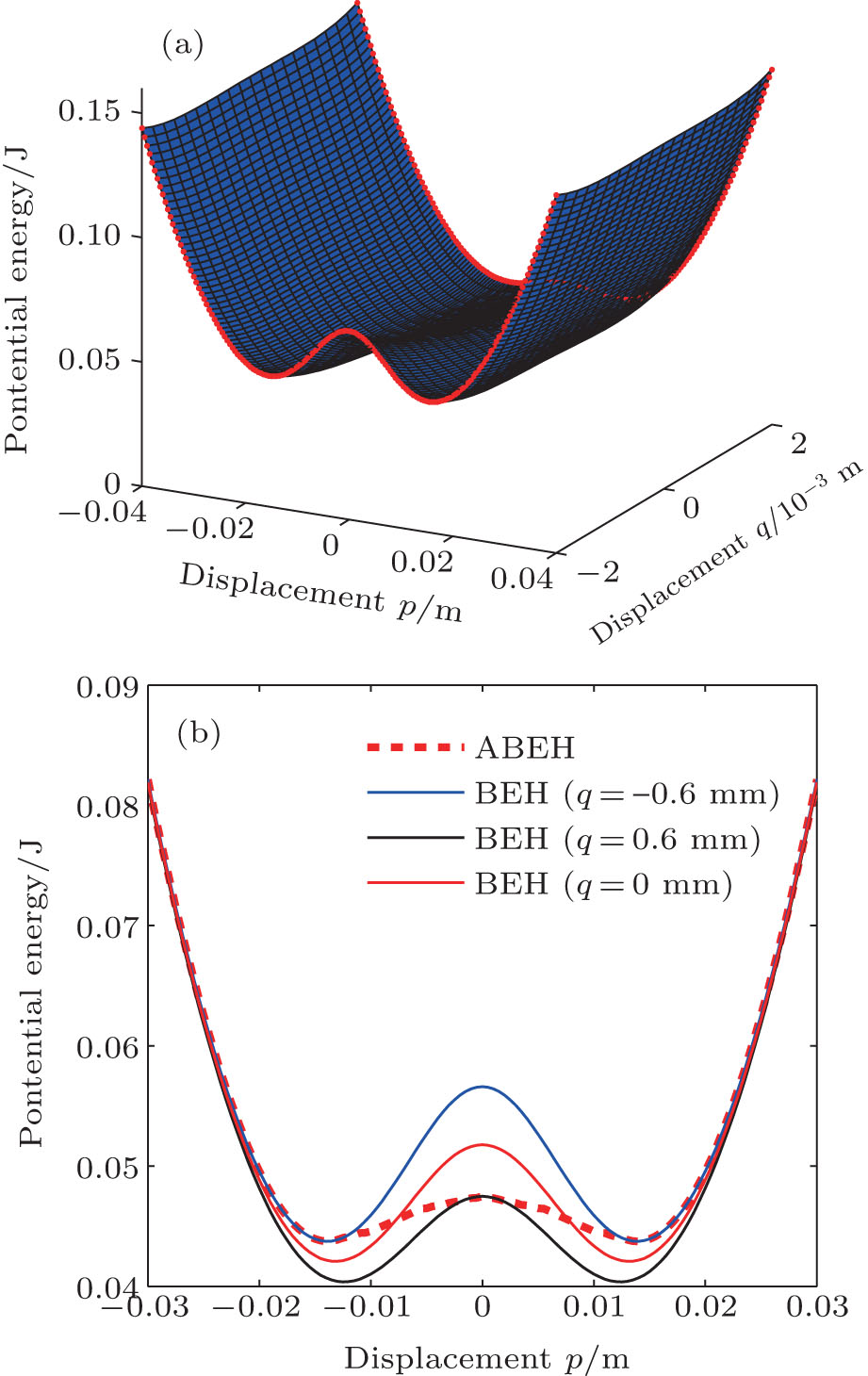 | Fig. 3. Mechanical potential energy of the ABEH. (a) three dimensions; (b) two dimensions. |
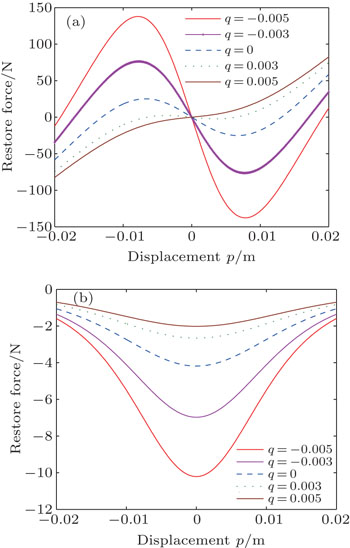
Given that the potential energy is known, the corresponding magnetic forces can be calculated by Eq. (
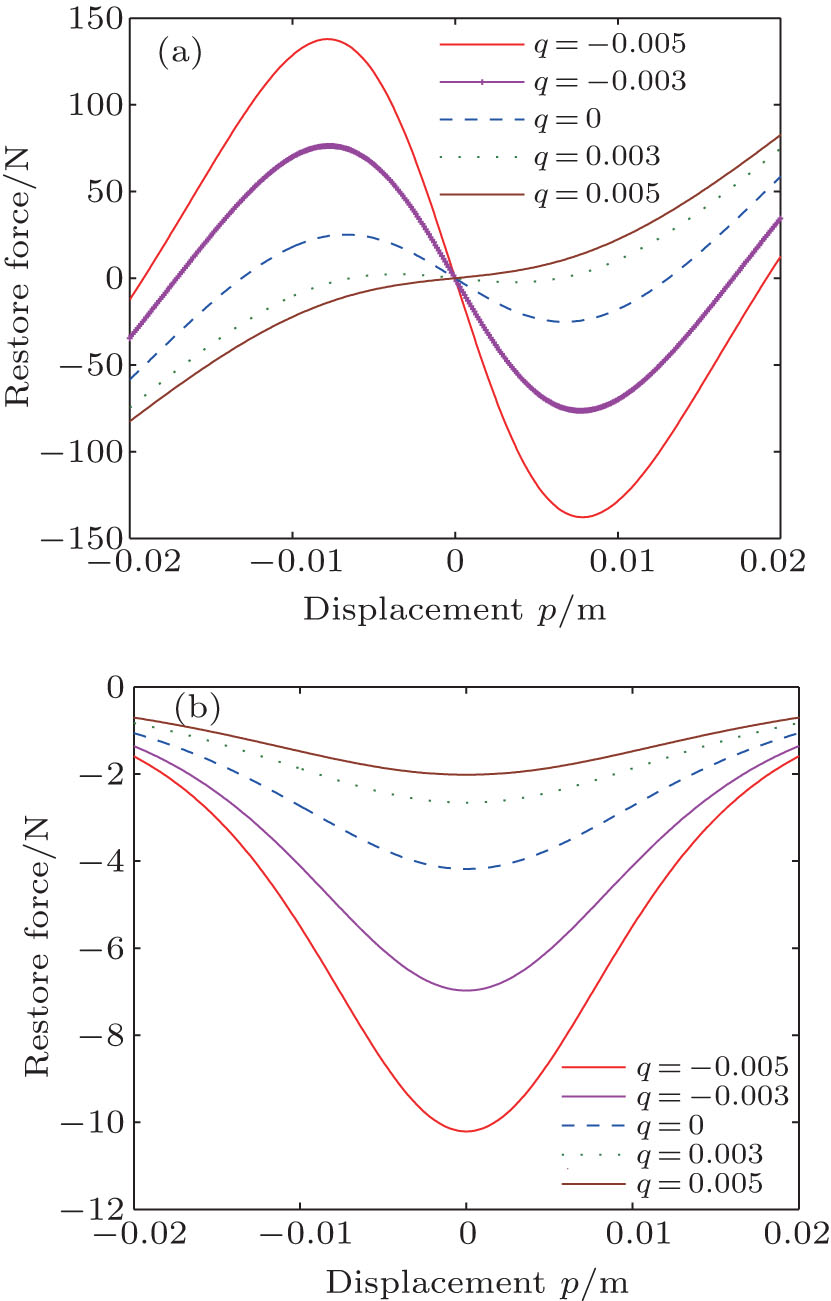 | Fig. 4. Magnetic coupling forces. (a) x direction; (b) y direction. |
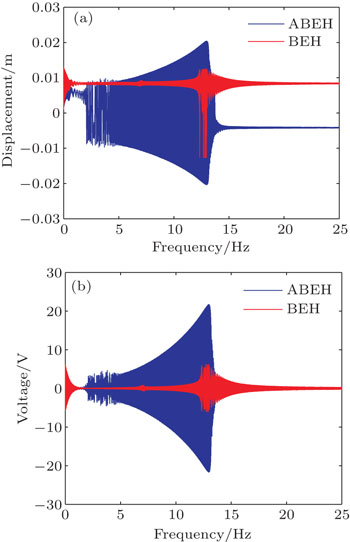
In this part, numerical simulations are carried out to investigate the dynamical response and electrical outputs of the two harvesters under frequency sweeping excitations. The base excitation is set as a harmonic motion governed by 
| Table 1. Model parameters used for the numerical test. . |
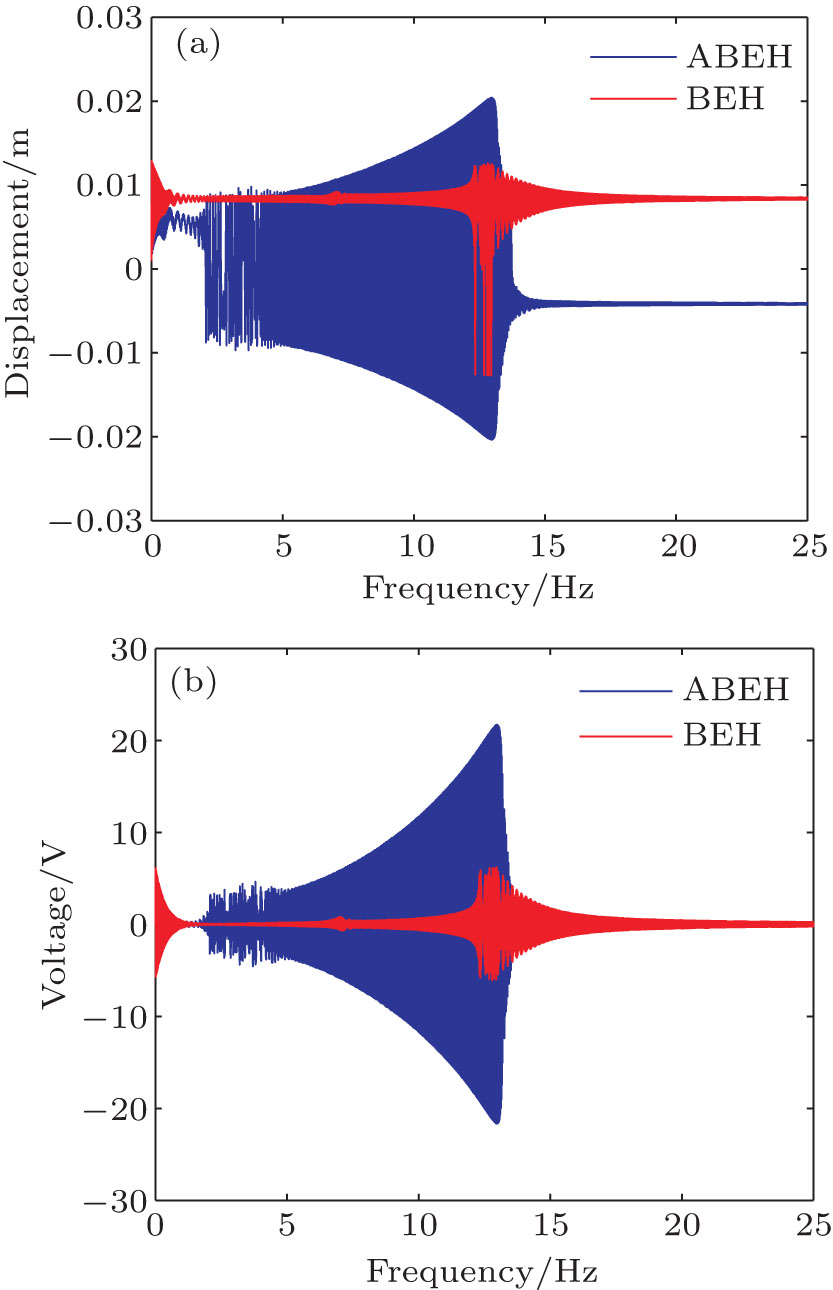 | Fig. 5. Dynamical responses and output voltages as frequency sweeps (a0 = 2 m/s2). (a) Displacement; (b) voltage. |
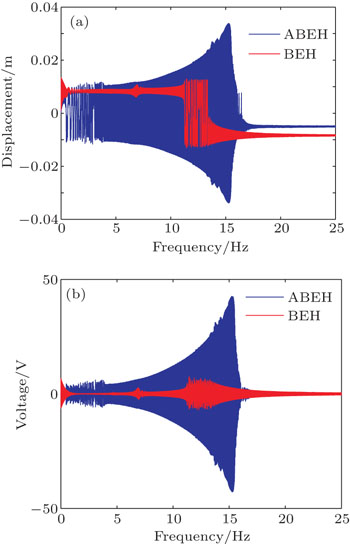
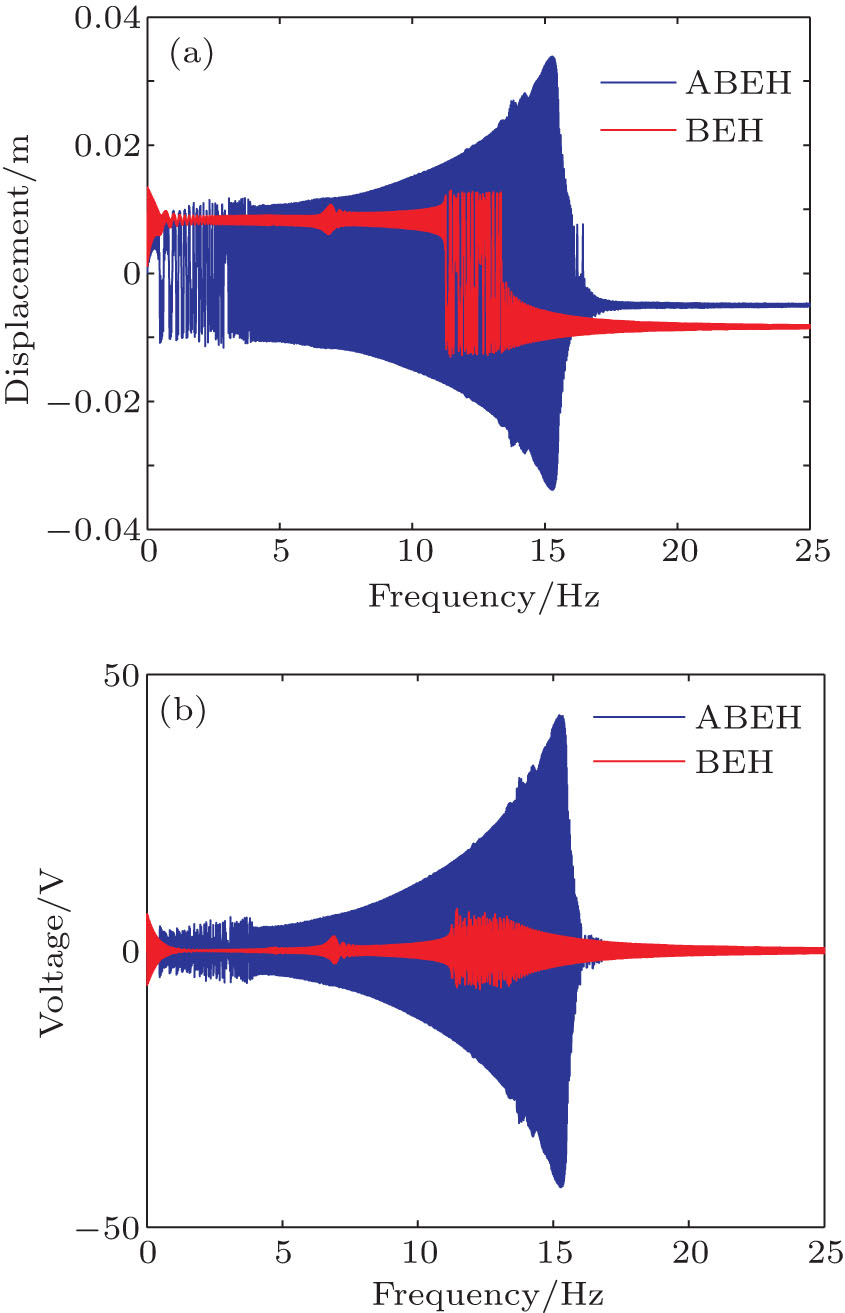 | Fig. 6. Dynamical responses and output voltages as frequency sweeps (a0 = 4 m/s2). (a) Displacement; (b) voltage. |
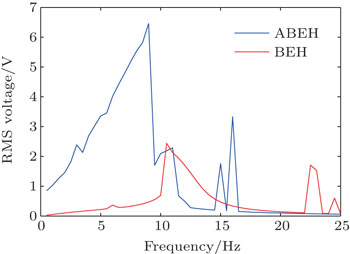
Figure
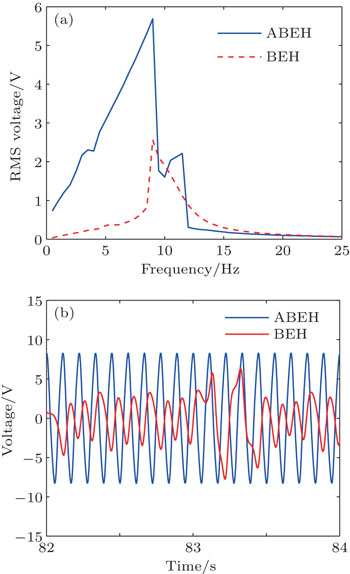
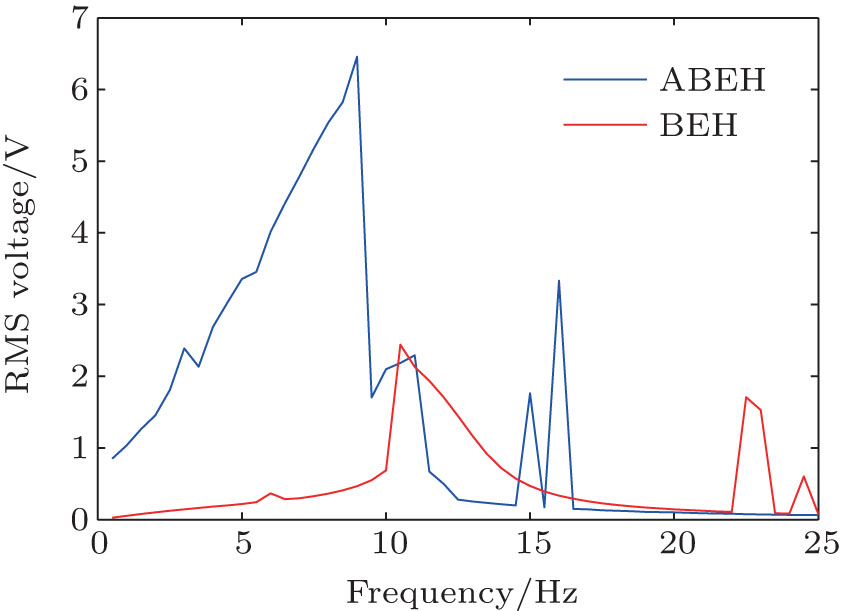 | Fig. 7. Steady results of RMS voltage versus constant frequency excitation (a0 = 2 m/s2). |
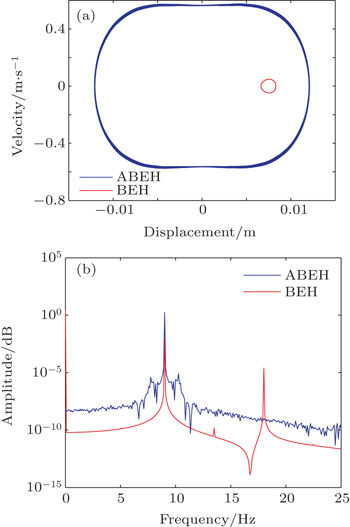
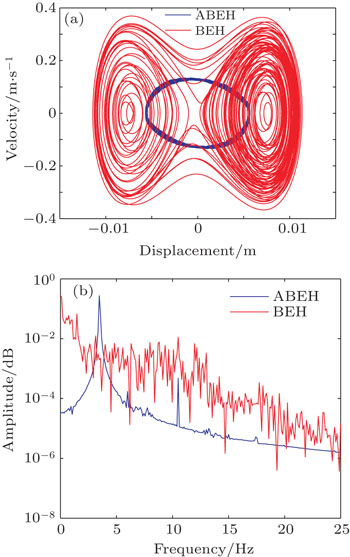
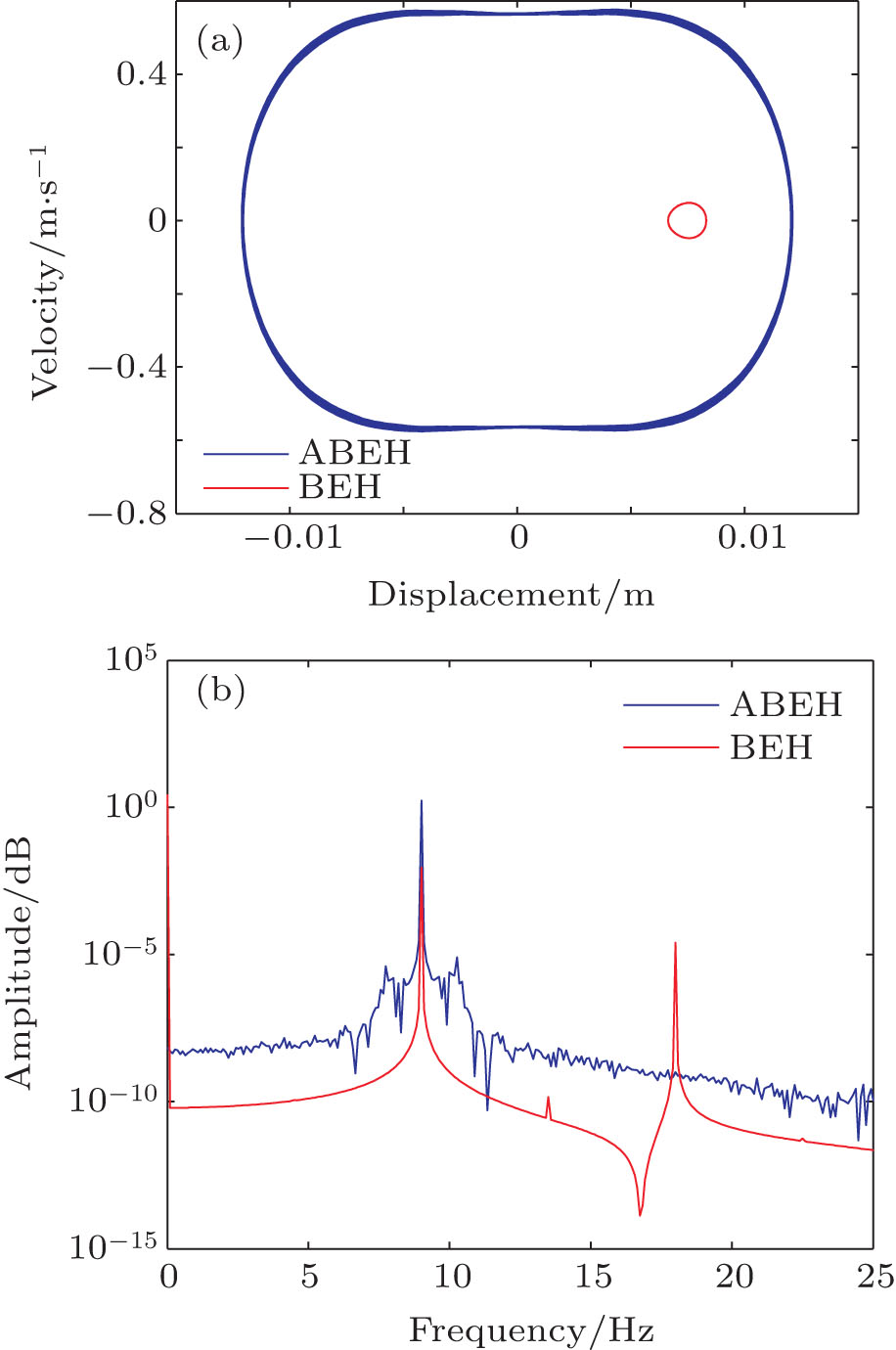 | Fig. 8. (a) Phase portrait and (b) frequency spectrum at f = 9 Hz. |
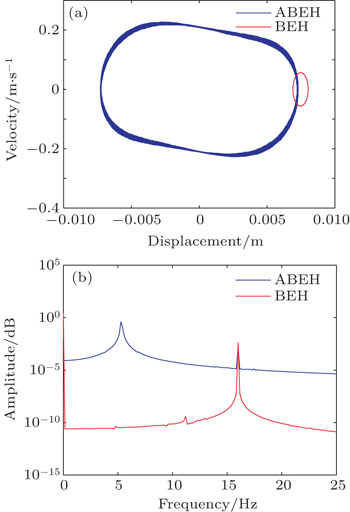
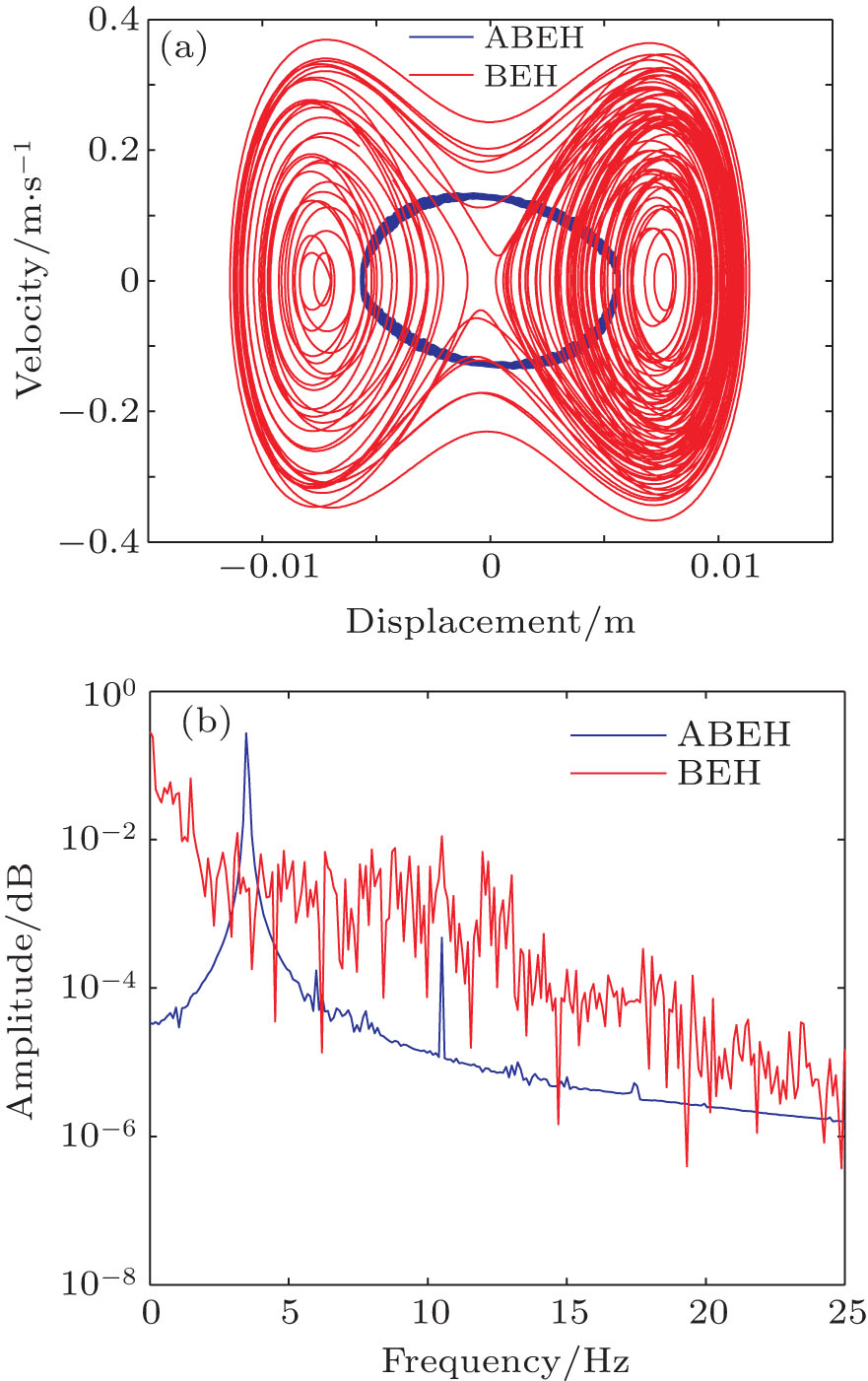 | Fig. 9. (a) Phase portrait and (b) frequency spectrum (b) at f = 10.5 Hz. |
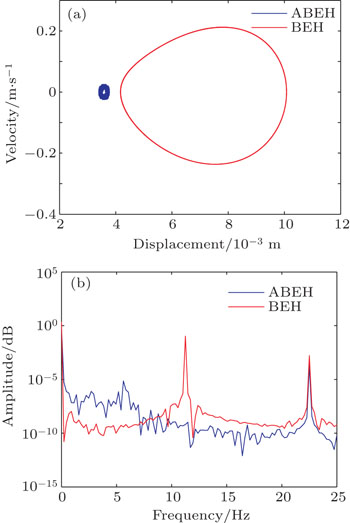
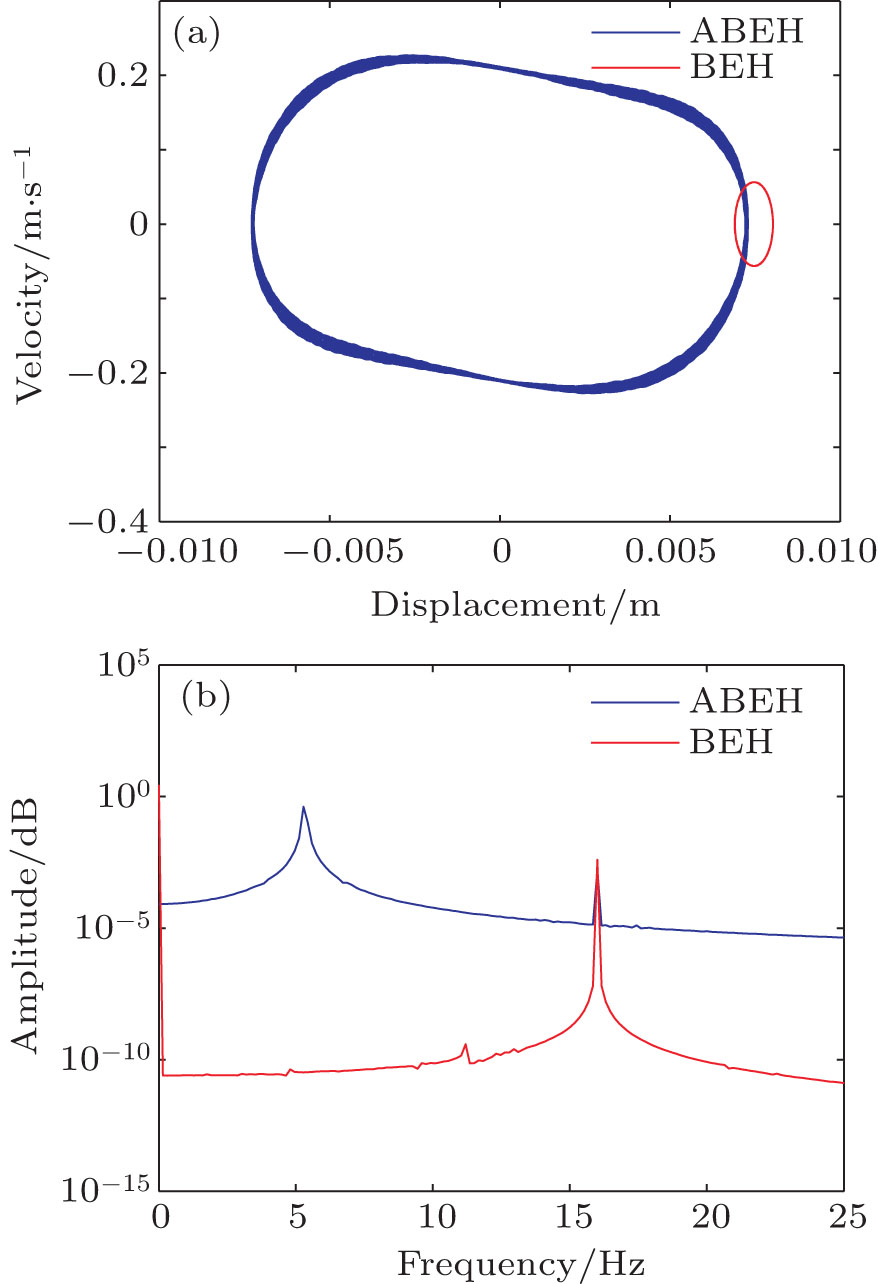 | Fig. 10. (a) Phase portrait and (b) frequency spectrum at f = 16.5 Hz. |
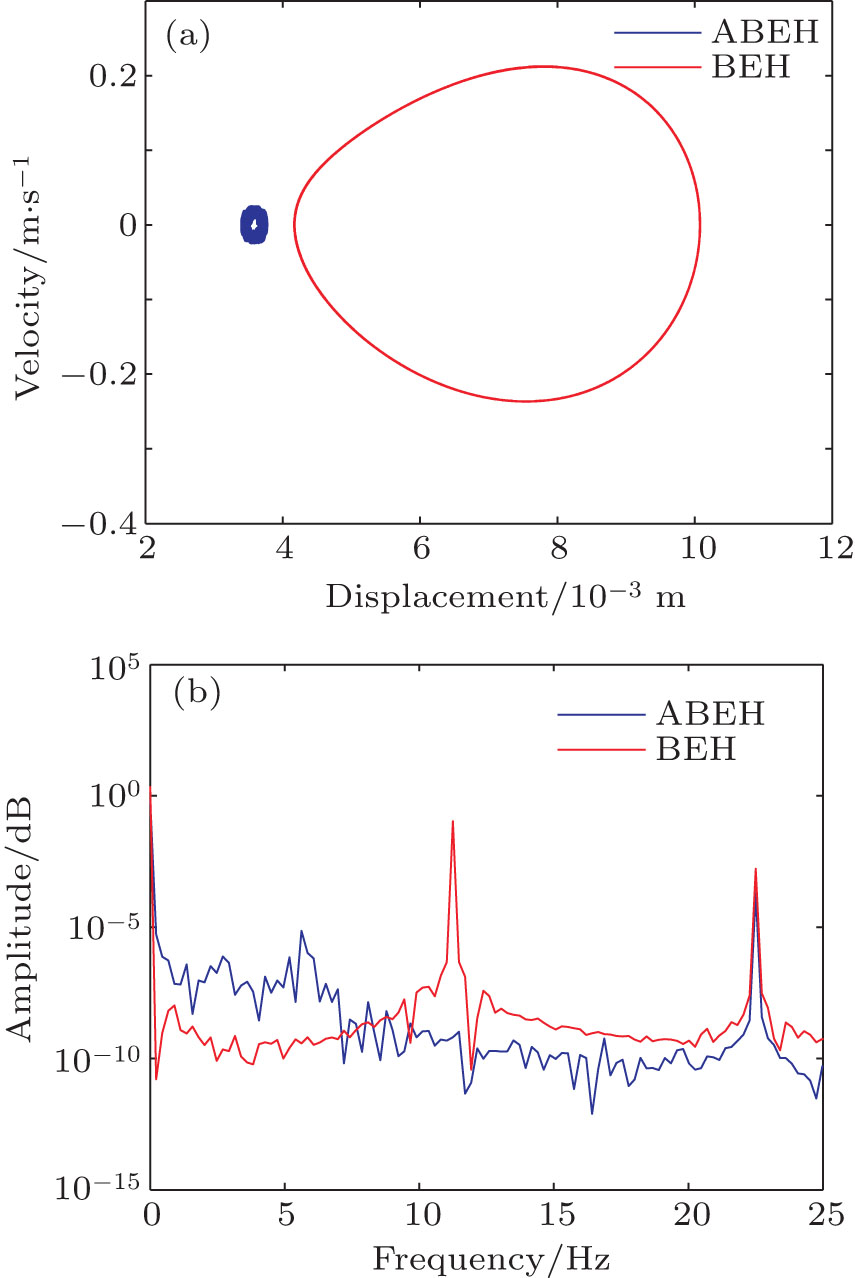 | Fig. 11. (a) Phase portrait and (b) frequency spectrum at f = 22.5 Hz. |
For the ABEH and BEH, we made some adjustments for system parameters to make their peak frequencies to reach identical. Figure
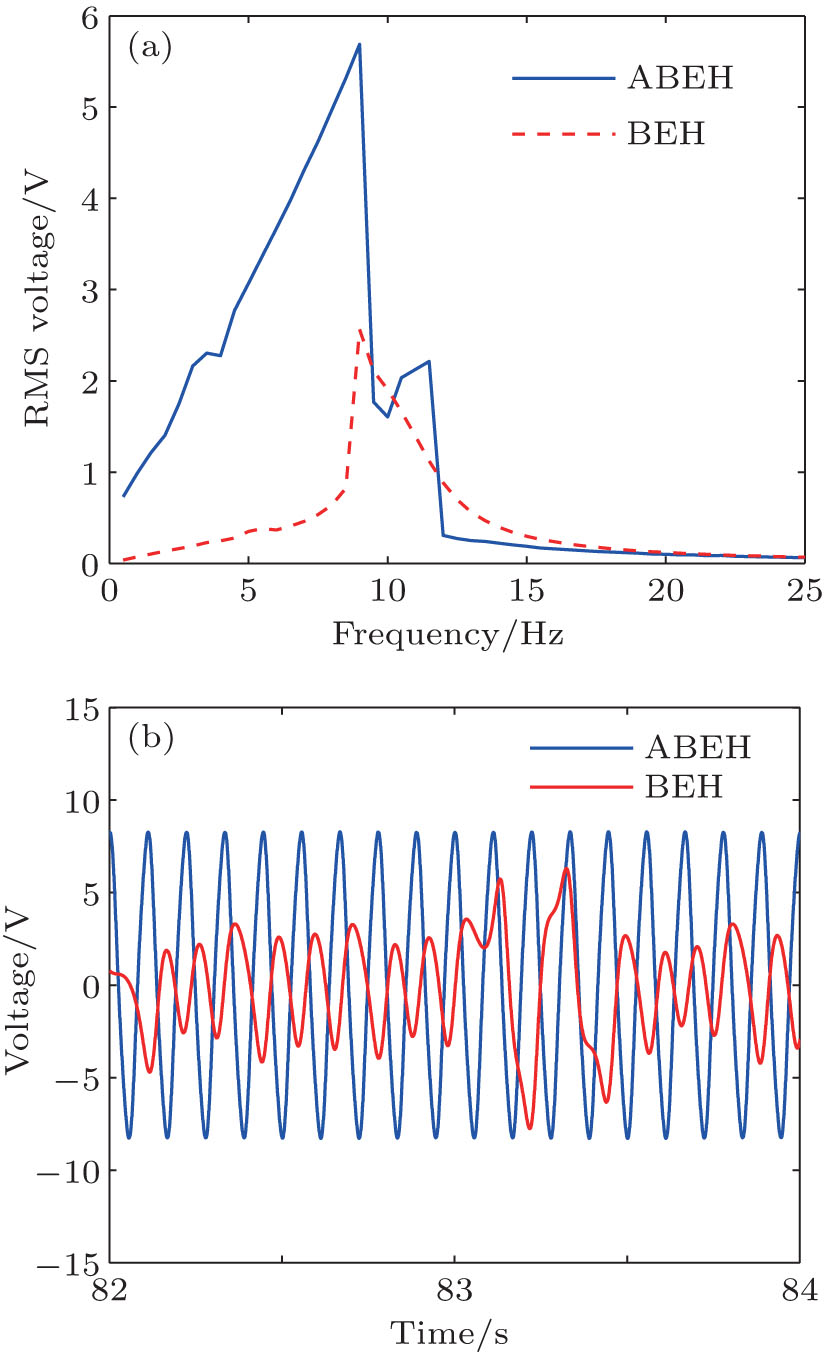 | Fig. 12. (a) Frequency–voltage response and (b) the waveform of voltage at 9 Hz. |
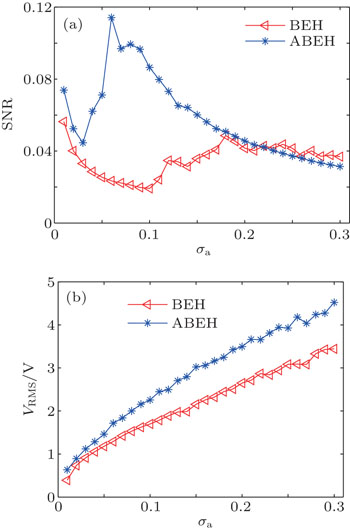
To study the ABEH’s harvesting ability under random excitations, we set the excitation as Gaussian white noise process 

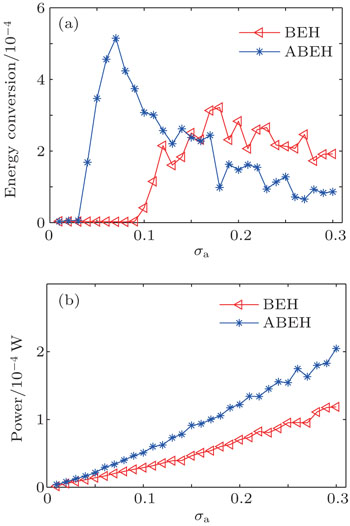
The performance of the harvesting device can be evaluated in terms of RMS output voltage and efficiency of power conversion, defined by

For an instantaneous power, its effective value is defined as



The Euler–Maruyama method[35] and Monte–Carlo method are used in carrying out the stochastic simulation with parameters in Table
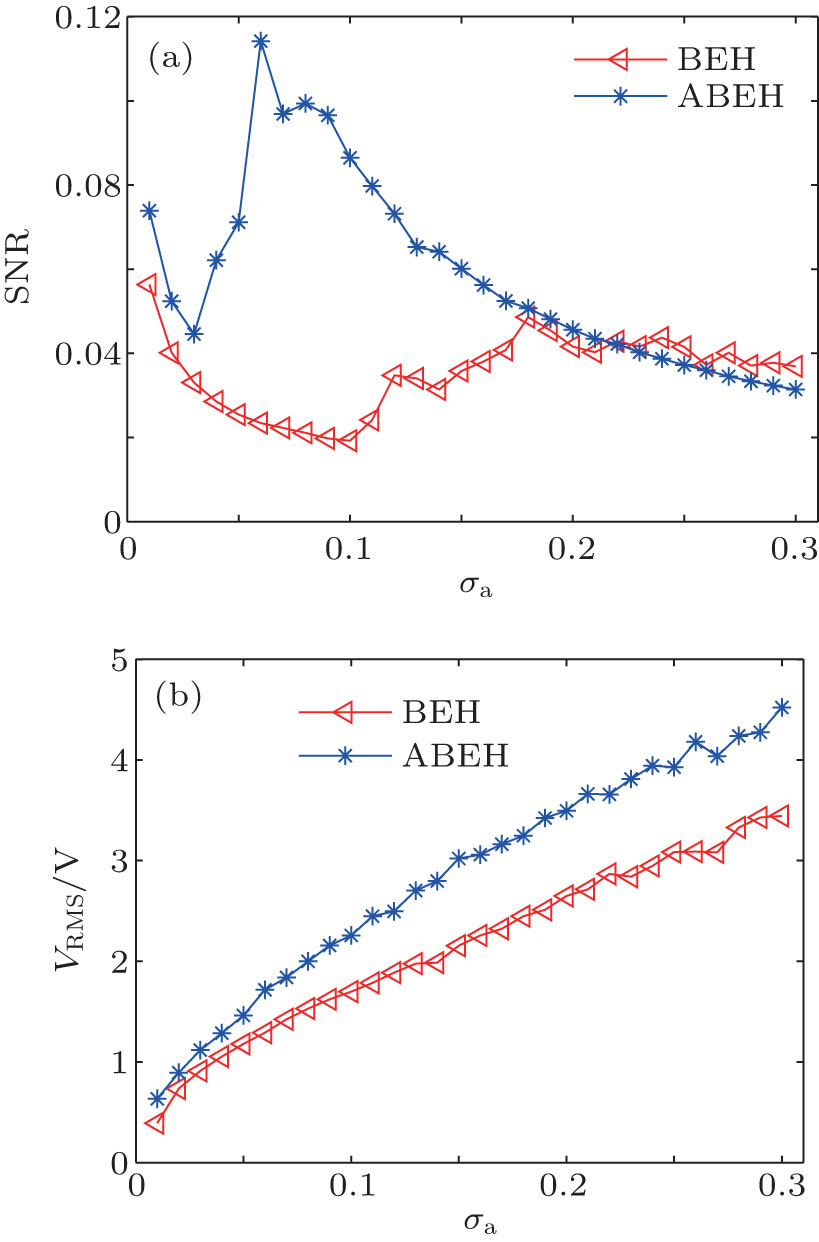 | Fig. 13. (a) Signal-to-noise ratio and (b) RMS output voltage. |
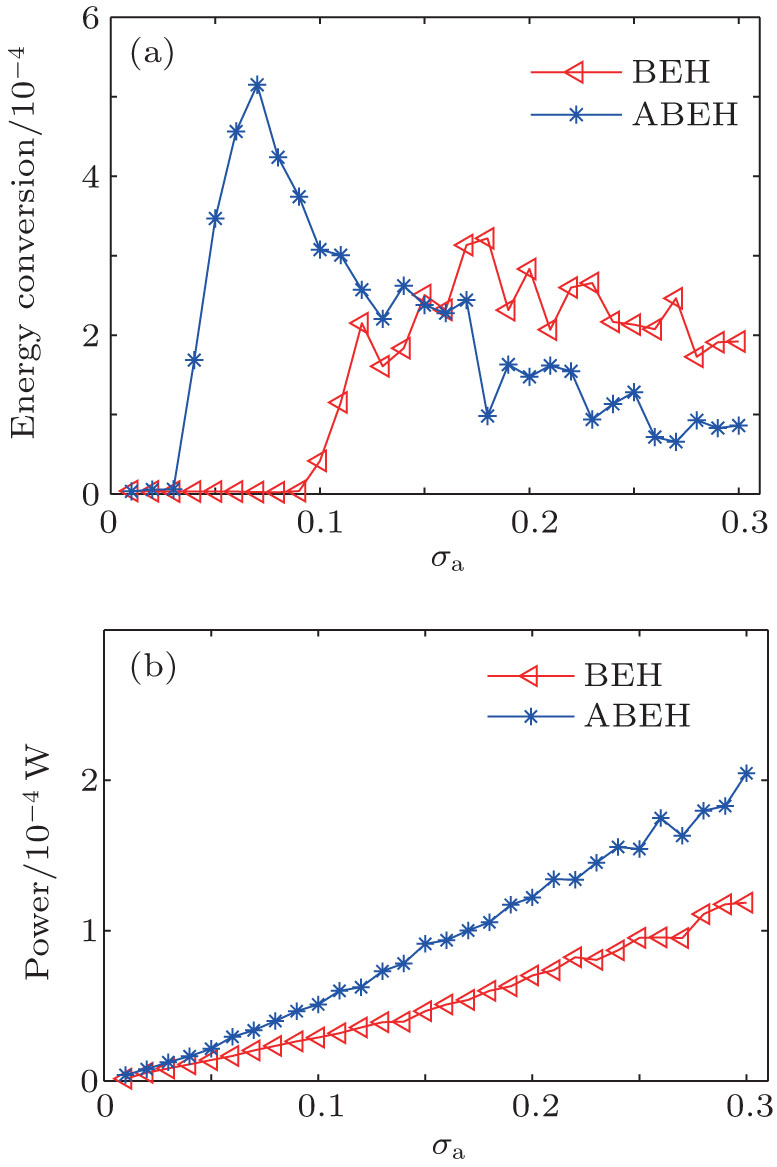 | Fig. 14. (a) Energy conversion efficiency and (b) output power. |
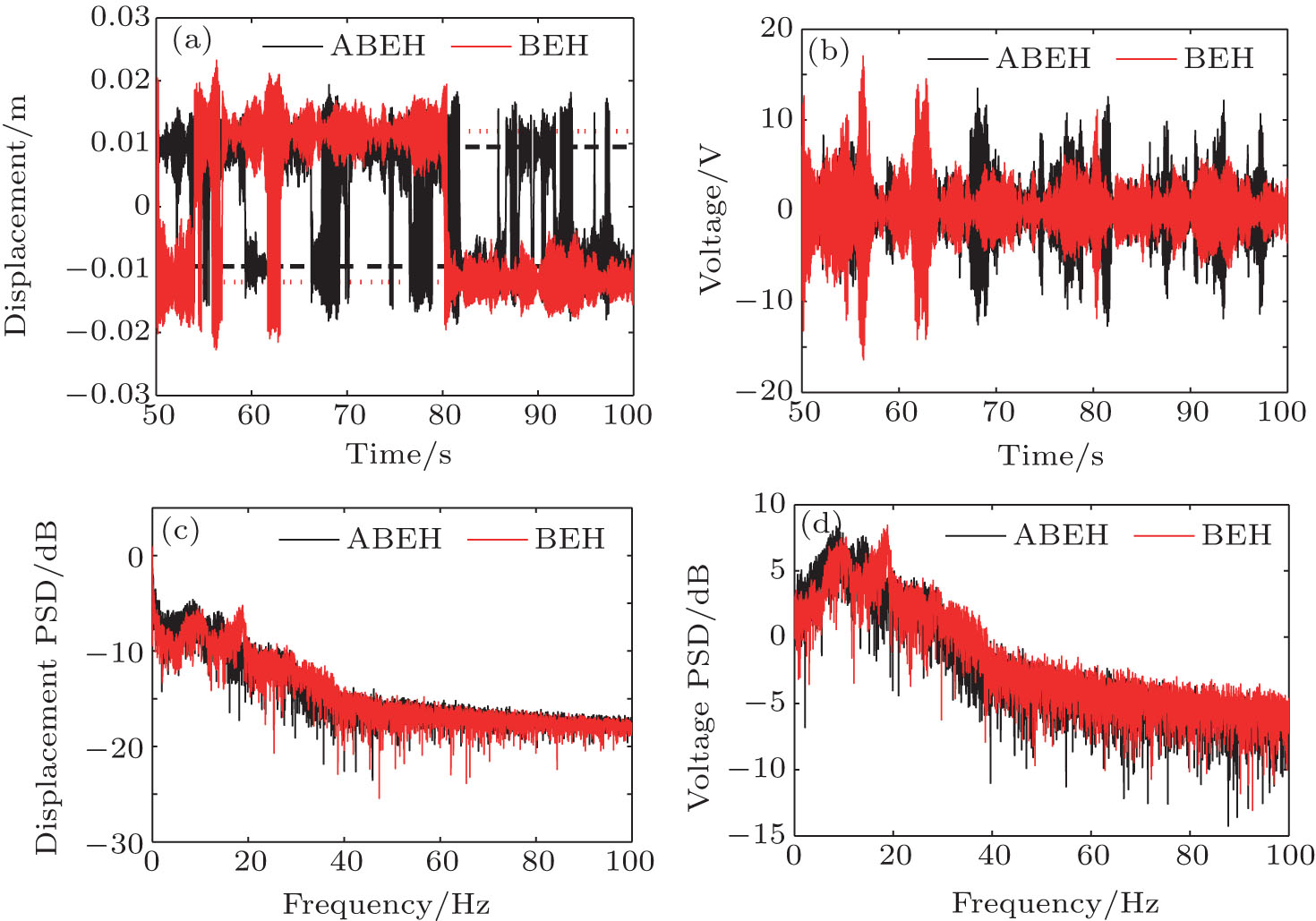
Figures 

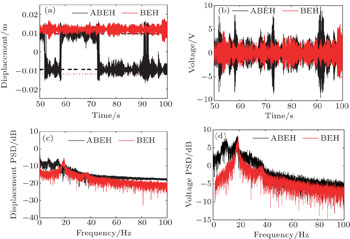
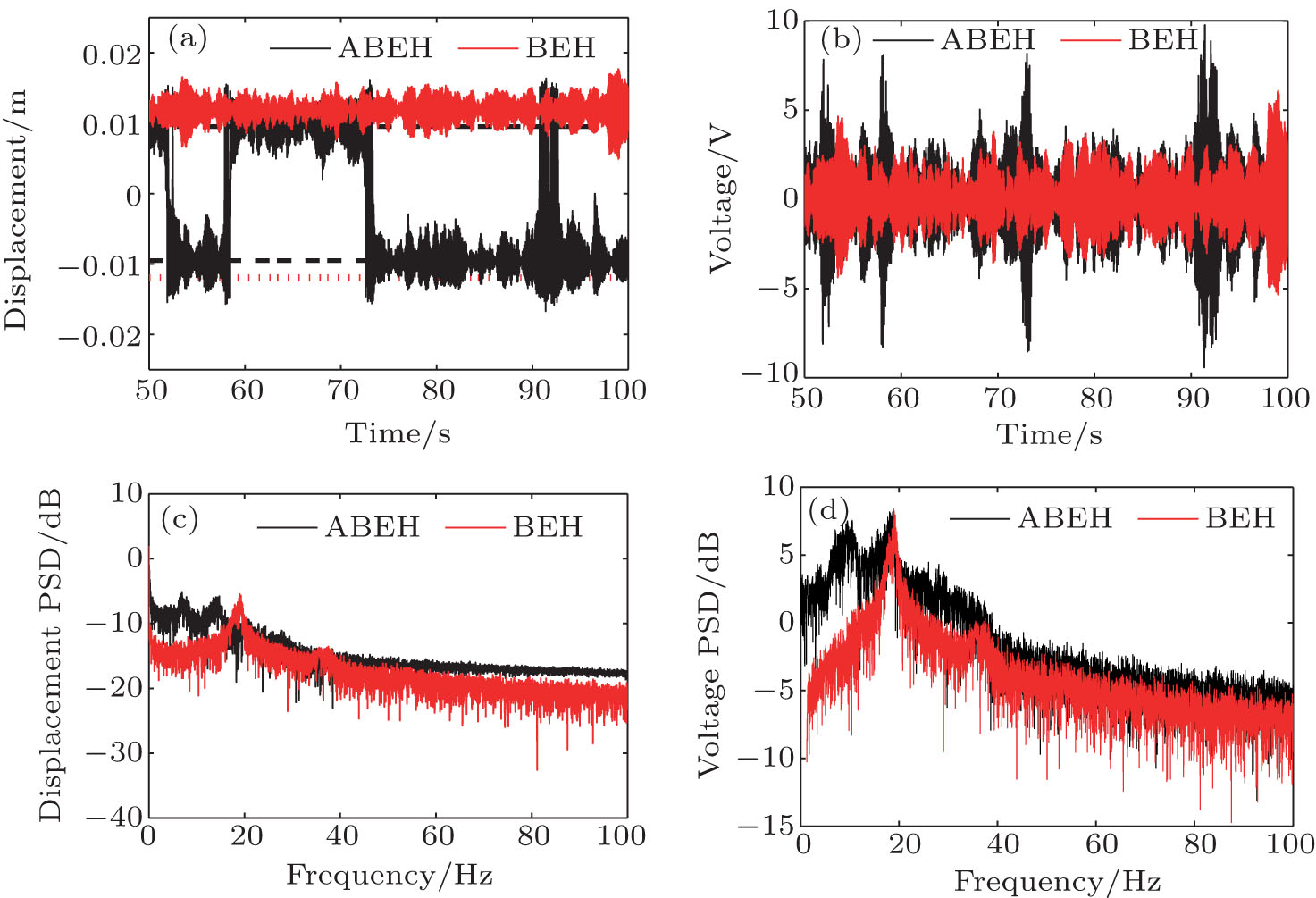 | Fig. 15. Displacement and voltage responses at σa = 0.07. (a) Displacement, (b) voltage, (c) PSD of displacement, and (d) PSD of voltage. |
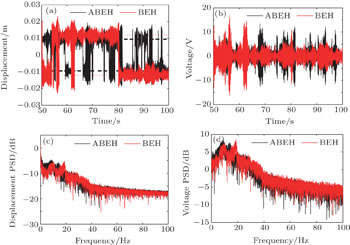
 | Fig. 16. Displacement and voltage responses at σa = 0.3. (a) Displacement, (b) voltage, (c) PSD of displacement, and (d) PSD of voltage. |
This paper proposes an improved piezoelectric energy harvester having two bistable elastic beams coupling through their magnets. The coupling electromechanical equations are derived by the extended Hamilton’s principle. Numerical simulations are carried out for harmonic and stochastic excitations. From the results, the following conclusions can be drawn.
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 | |
| 21 | |
| 22 | |
| 23 | |
| 24 | |
| 25 | |
| 26 | |
| 27 | |
| 28 | |
| 29 | |
| 30 | |
| 31 | |
| 32 | |
| 33 | |
| 34 | |
| 35 |