Consensus for second-order multi-agent systems with position sampled data
Wang Rusheng1, Gao Lixin1, Chen Wenhai1, †,  , Dai Dameng2
, Dai Dameng2
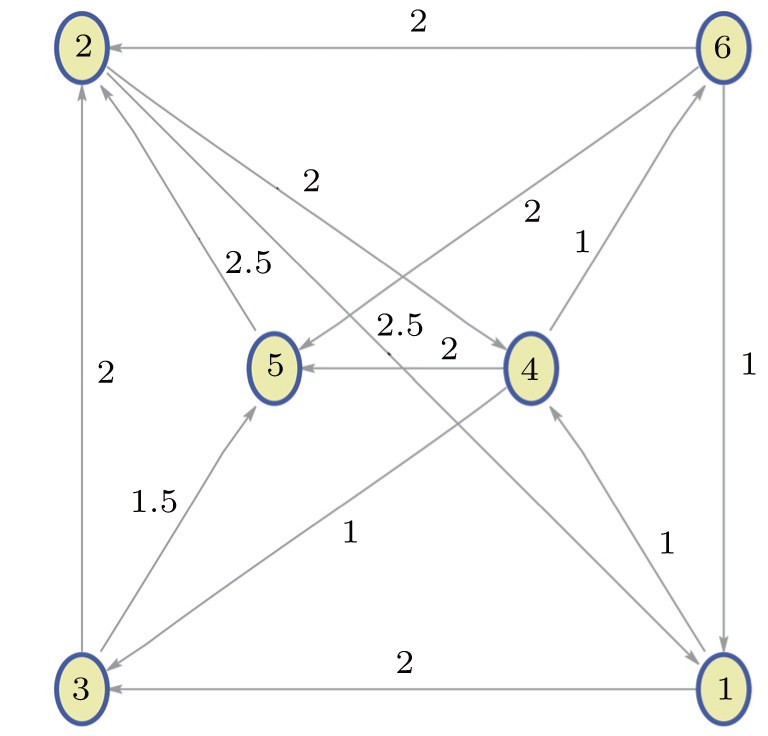
, Dai Dameng2 Directed graph
Consensus for second-order multi-agent systems with position sampled data |
|
Wang Rusheng1, Gao Lixin1, Chen Wenhai1, †,
, Dai Dameng2 |
Directed graph |
| |