Locating the position of objects in non-line-of-sight based on time delay estimation
Wang Xue-Feng1, 2, Wang Yuan-Qing1, †,  , Su Jin-Shan1, 2, Yang Xing-Yu1, 2
, Su Jin-Shan1, 2, Yang Xing-Yu1, 2
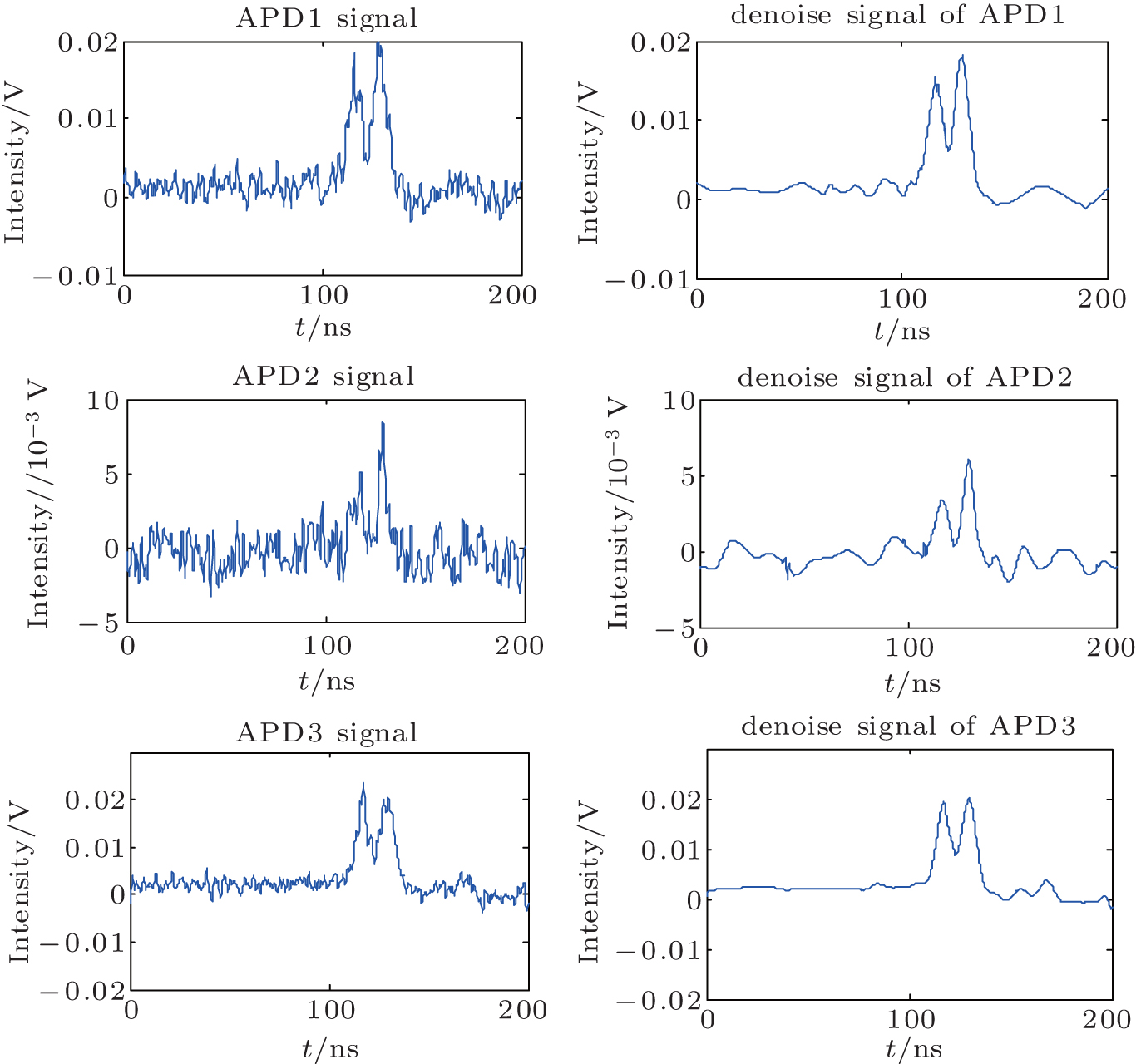
, Su Jin-Shan1, 2, Yang Xing-Yu1, 2 Three APDs received signals which are detected from two white boards, and their de-noised signals. The three signals in the left column are received signals and the three signals in the right column are their de-noised signals.