Locating the position of objects in non-line-of-sight based on time delay estimation
Wang Xue-Feng1, 2, Wang Yuan-Qing1, †,  , Su Jin-Shan1, 2, Yang Xing-Yu1, 2
, Su Jin-Shan1, 2, Yang Xing-Yu1, 2
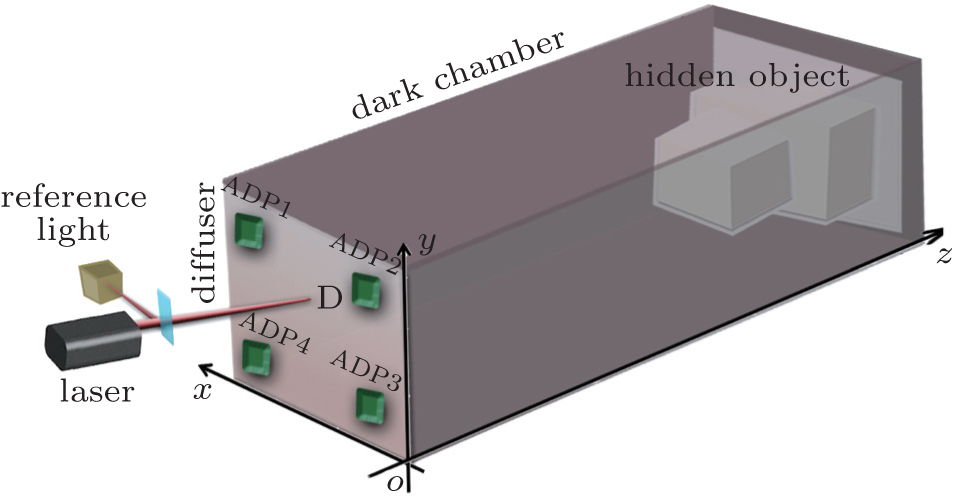
, Su Jin-Shan1, 2, Yang Xing-Yu1, 2 Experiment setup of our system scene. The laser light is illuminated onto a diffuser at point