Locating the position of objects in non-line-of-sight based on time delay estimation
Wang Xue-Feng1, 2, Wang Yuan-Qing1, †,  , Su Jin-Shan1, 2, Yang Xing-Yu1, 2
, Su Jin-Shan1, 2, Yang Xing-Yu1, 2
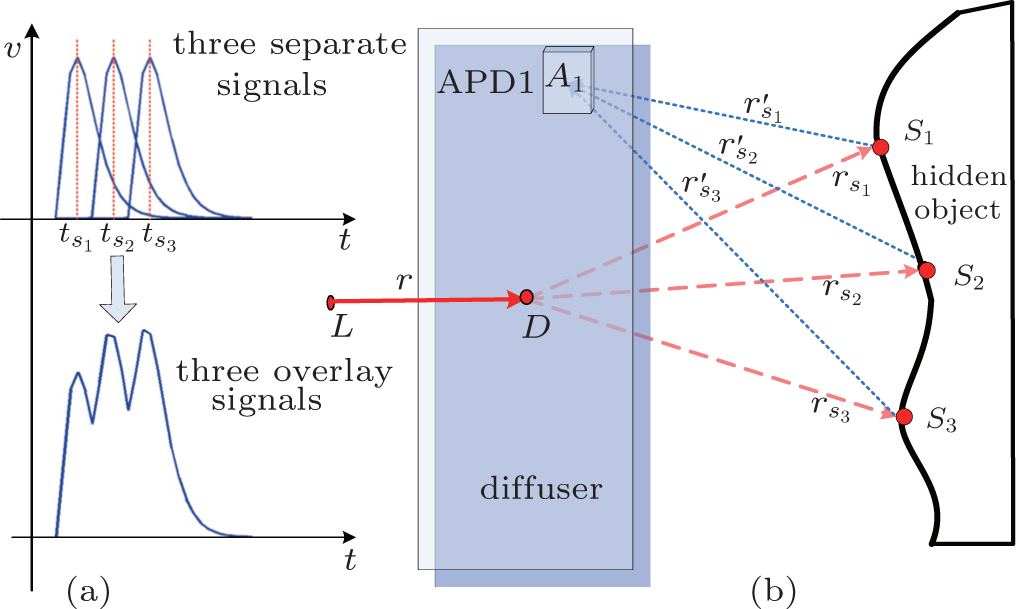
, Su Jin-Shan1, 2, Yang Xing-Yu1, 2 Received signals from hidden object by one APD. (a) the received signals from three random points of the hidden object, the upper signals are separated for three points; the lower signal is detected by APD; (b) the light transmission process of the laser to one APD.