{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Dynamic properties of chasers in a moving queue based on a delayed chasing model
[Guo Ning1, †,  , Ding Jian-Xun2, 3, Ling Xiang2, Shi Qin2, Kühne Reinhart2, 4]
, Ding Jian-Xun2, 3, Ling Xiang2, Shi Qin2, Kühne Reinhart2, 4]
, Ding Jian-Xun2, 3, Ling Xiang2, Shi Qin2, Kühne Reinhart2, 4]
|
|


† Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant Nos. 71071044, 71001001, 71201041, and 11247291), the Doctoral Program of the Ministry of Education of China (Grant Nos. 20110111120023 and 20120111120022), the Postdoctoral Fund Project of China (Grant No. 2013M530295), the National Basic Research Program of China (Grant No. 2012CB725404), and 1000 Plan for Foreign Talent, China (Grant No. WQ20123400070).
A delayed chasing model is proposed to simulate the chase behavior in the queue, where each member regards the closest one ahead as the target, and the leader is attracted to a target point with slight fluctuation. When the initial distances between neighbors possess an identical low value, the fluctuating target of the leader can cause an amplified disturbance in the queue. After a long period of time, the queue recovers the stable state from the disturbance, forming a straight-line-like pattern again, but distances between neighbors grow. Whether the queue can keep stable or not depends on initial distance, desired velocity, and relaxation time. Furthermore, we carry out convergence analysis to explain the divergence transformation behavior and confirm the convergence conditions, which is in approximate agreement with simulations.
The motions of interacting entities have drawn attention in various fields.[1,2] They contain ants, birds, pedestrians,[3,4] vehicles, and even robots, which are termed as self-driven particles.[5–8] Many phenomena in these systems have been studied, such as phase transitions and metastable states.[9–11]
Chasing, which is ubiquitous in nature, has been investigated for a long time. A two-particle system consisting of one chaser and one target is the simplest case, where there exists a challenging mathematical problem to depict trajectories.[12–14] Systems with many chasers and one target have been modeled and analyzed.[15,16] Systems including several chasers and targets have been studied in fields of game theory and multi-agent problems.[17,18] The chasing problem has been further extended to group chase, considering a lot of chasers and targets.[19] In this model, each chaser tries to pursue the nearest target, and at the same time each target does their best to escape the nearest chaser in order to avoid removal. In addition, conversion has been added in the model, meaning that the caught targets convert into chasers instead of removals.[20] Furthermore, some fast chasers have been considered to investigate the optimal number of chasers and minimum cost for catching targets.[21] Almost all studies on chasing aim at selecting targets dynamically in the process, but ignore the situation in which each chaser has only one constant target, i.e., the regular queue. In many cases, such as marching, members in a queue will always regard the closest one ahead them as targets, and follow the trajectories they leave.
A self-driven particle system covers a wide range, for example the fleet of carrier robots in a future factory. Some unreasonable setting in a queue may lead to chaos. In this work, we study the effect of initial distance and relaxation time on the stability of a queue chase by using a delayed model. In this model each chaser regards the preceding one as a target. We find that when the target of the first member in the queue shows a slight fluctuation, a big fluctuation in the system can generate and neighbors’ distance will change. Increasing initial distance or decreasing relaxation time can enhance system stability, which may be helpful for engineering design. By convergence analysis, the critical parameter values are found.
This paper is composed as follows. The delayed model and parameters are introduced in Section 2. Then we present the simulation results and convergence analysis in Sections 3 and 4, respectively. Section 5 shows the conclusion.
The delayed chasing model selected from Helbing[22,23] is continuous both in time and space, and we apply it to depict queue chase behaviors. Each chaser regards a particular one (unchanged in the walking process), who locates in the nearest place ahead in the initial stationary state, as the target. According to the sequencing, we set L1(t) = (x1(t), y1(t)) as the leader’s position of the queue, Ln(t) = (xn(t), yn(t)) as the location of the final one at time t, and suppose that the queue includes n members. In addition, L0 denotes the position of the leader’s target.
The chasing force, which represents one’s motivation to walk in a given direction with a desired speed, is influenced by Newtonian-like mechanics and then given by

This relationship reflects the adaptation of current speed 



Then the resulting motion differential equation reads

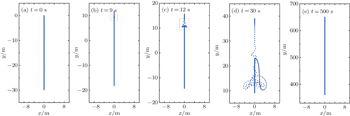
Using the delayed model, we have carried out simulations for queues. Firstly, the leader’s target point is distributed in Lo = (xo(t), yo(t)), where xo fluctuates according to the uniform probability distribution in an interval [−f, f] at each time step and yo(t) is constant 40000 m in all simulations. Before a progress starts to run, the leader occupies the frontal position L1(0) = (0, 0) in the queue, and all other xi = 0, dis = yi − 1 − yi, where dis denotes the initial distance between any two neighbors. Figure
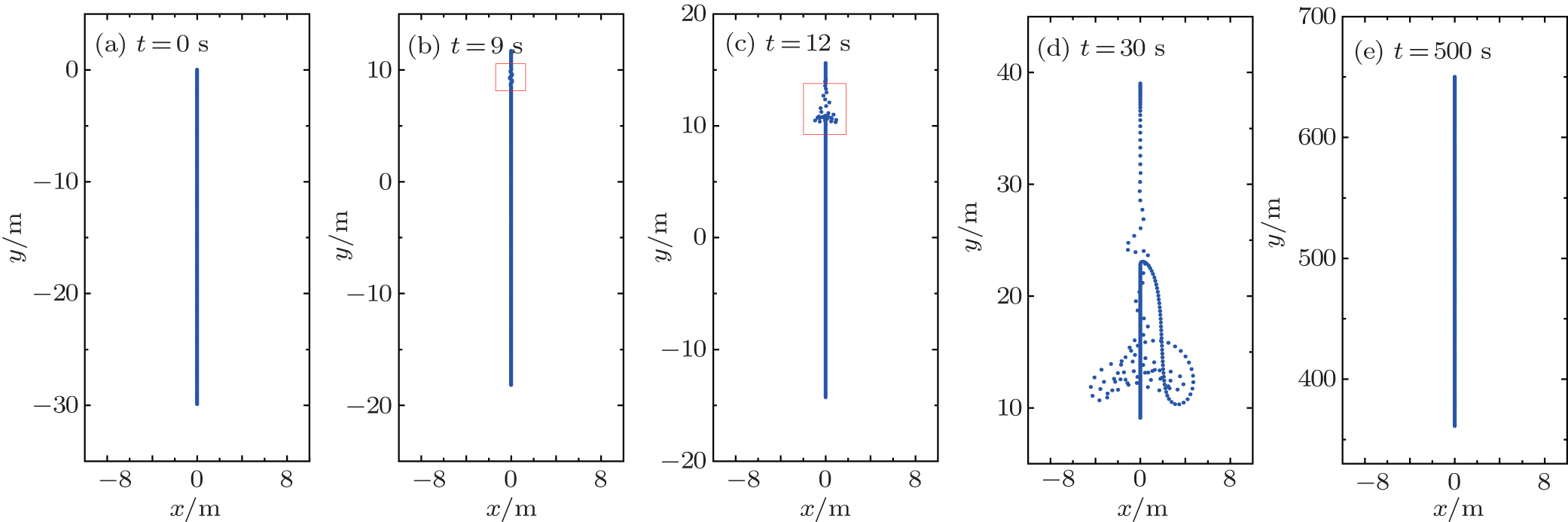 | Fig. 1. Changing queue pattern for t = 0 s (a), t = 9 s (b), t = 12 s (c), t = 30 s (d), and t = 500 s (e) when dis = 0.1 m, f = 0.1 m, vo = 1.3 m/s, and τ = 0.5 s. |
When f = 0.1 m, all chasers move forward as a line over timescale t ∈ [0 s, 9 s]. At t = 9 s, a series of fluctuations emerge in the red outline of Fig.
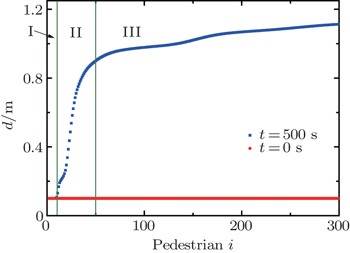
The increment in queue length implies variation of distances between neighbors, which is rendered in Fig.
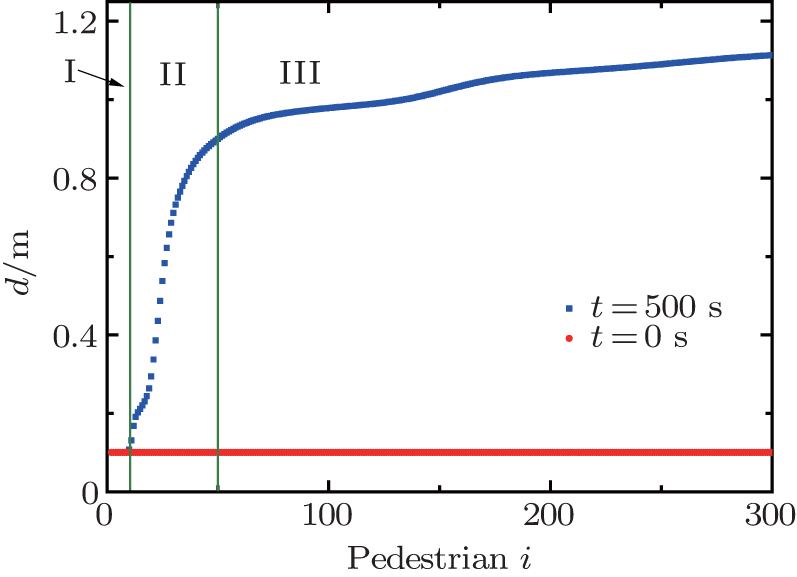 | Fig. 2. Distance (d) between neighbors at time t = 0 and t = 500 s. n = 300, dis = 0.1 m, f = 0.1 m, vo = 1.3 m/s, and τ = 0.5 m. |
Figure

A larger value of disturbance rate D indicates smaller disturbance. All members move along the same direction if D = 1. For universality, one can define the deviation degree between the direction of the leader’s desired velocity and the vertical as

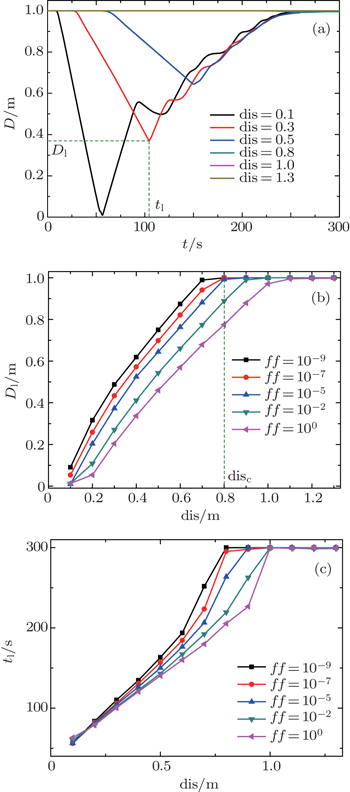
Numerical simulations reveal that the factor of initial distance dis has significant effects on quantity of disturbance rate and the time, when the lowest D emerges. After different periods of time respective to different dis, disturbances appear. Then before the queue returns to a stable state (D = 1) again, we have collected dissimilar lowest quantity of D (symbolized by Dl), as shown in Fig.
The effect of variable deviation degree is presented in Figs.
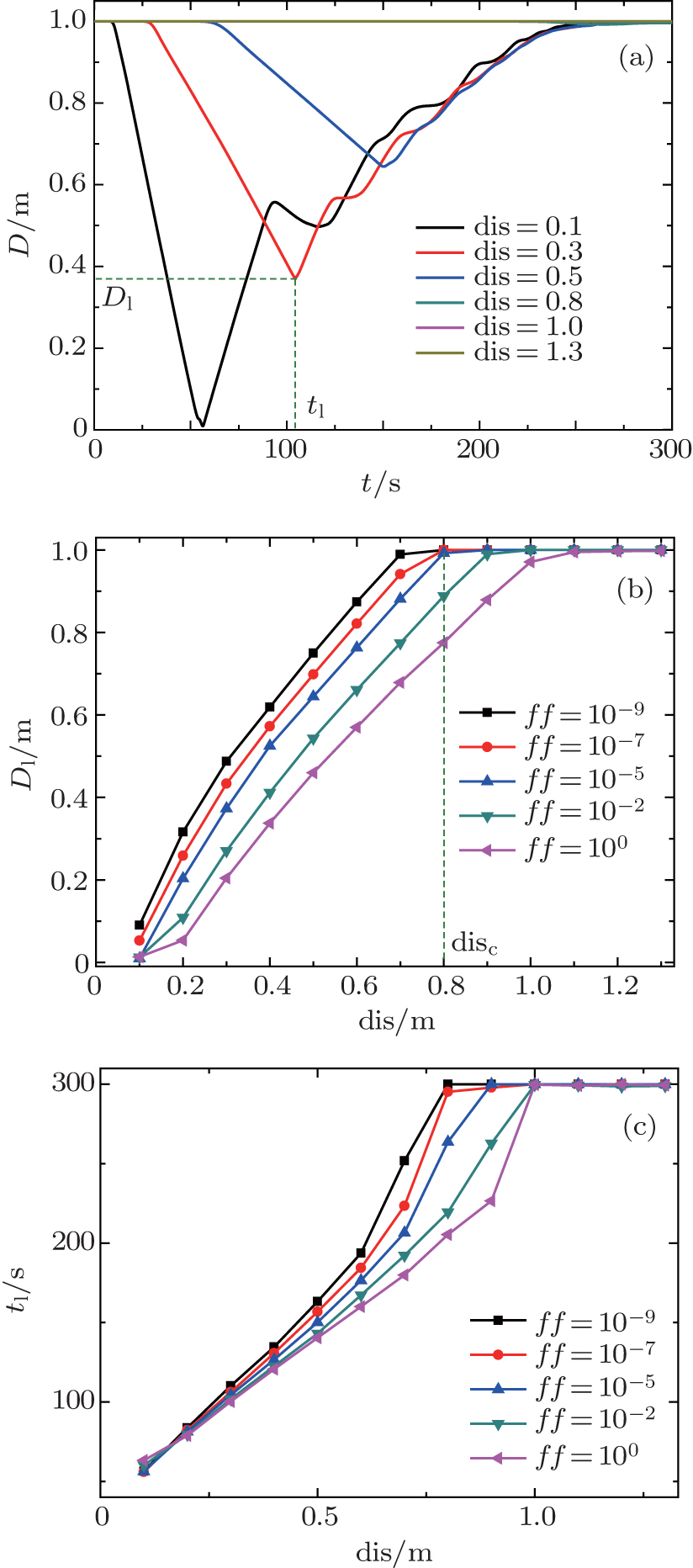 | Fig. 3. (a) Relationship between initial distance dis and disturbance rate D in the time period [0,300 s] with the condition f = 0.1 m. Dl and tl here mean the lowest quantity of D and the time achieving that in the process. (b) Distribution of Dl with variable f f. disc shows that when initial distance dis > disc with one certain f f, D keeps at 1 all the time, i.e., no observable disturbance exists in the queue. (c) Distribution of time tl when relative Dl is obtained. |
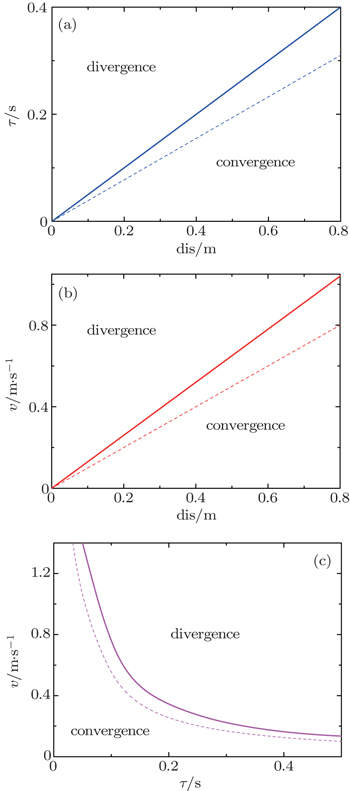
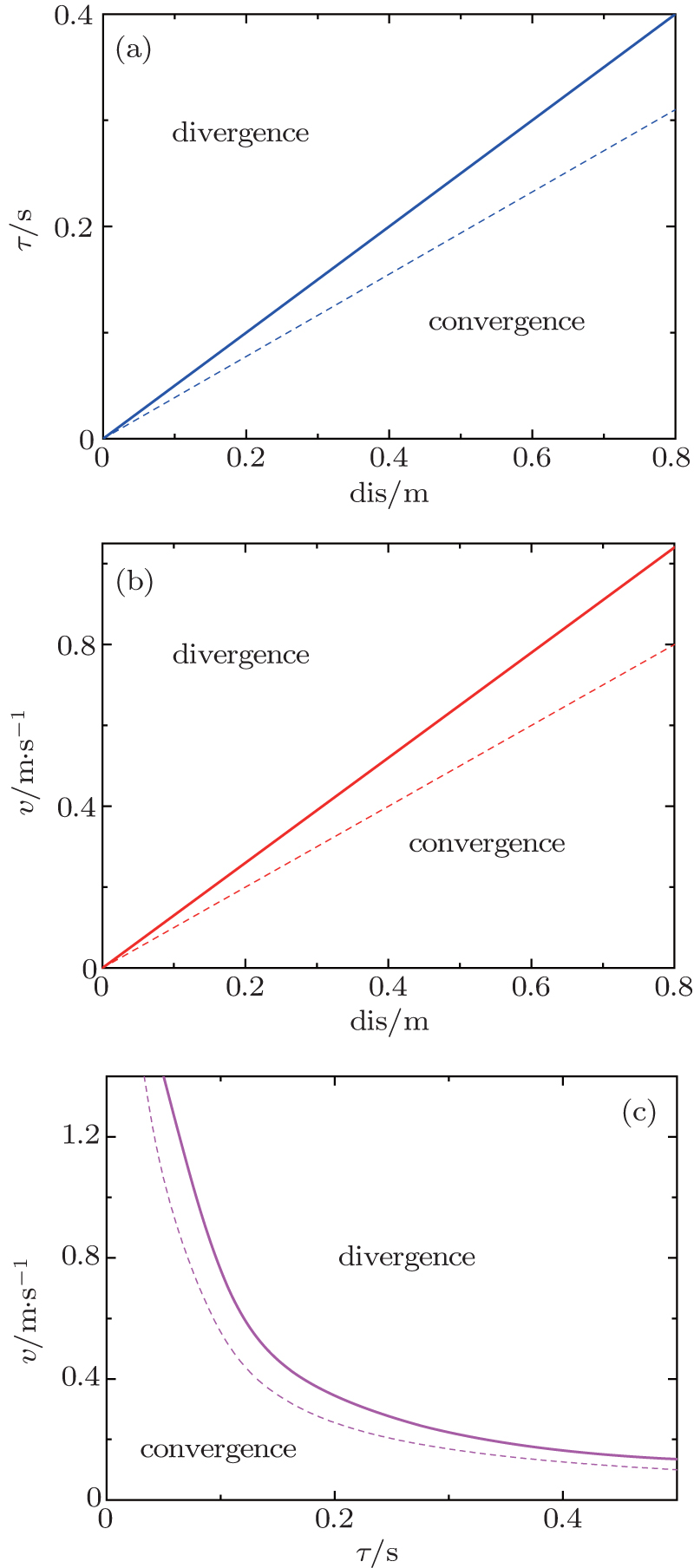 | Fig. 4. Divergent or convergent transformation process under three variables. (a) Initial distance dis and relaxation time τ with vo = 1.3 m/s. (b) Initial distance dis and desired velocity vo with τ = 0.5 s. (c) Relaxation time τ and desired velocity vo with dis = 0.1 m. Because the value of f f has no qualitative influence on the convergence, f f is fixed at 10−3. The dotted lines are boundaries from convergence analysis. |
Figure
Here, we present the complex function to find which factors have an effect on fluctuation convergence. Figure
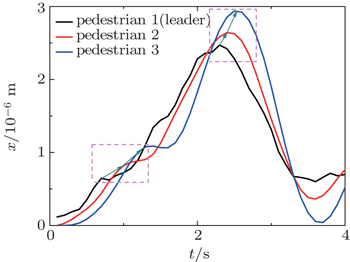
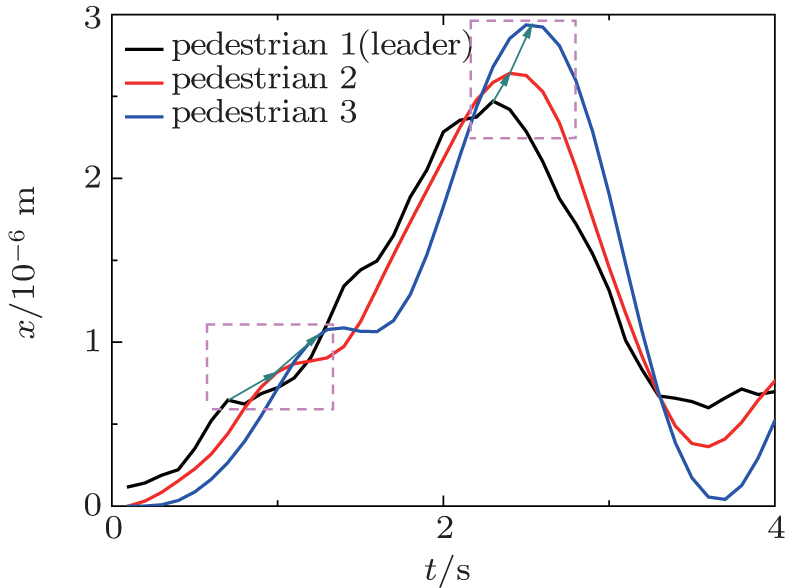 | Fig. 5. First three members’ location change in the direction of x axis. In this simulation, dis = 0.1 m, f = 0.1 m, vo = 1.3 m/s, and τ = 0.5 s. Arrows in magenta outlines show increasing quantity of amplitude and time-lapse effect from the leader to third member. |
According to lines in Fig.
Equations (
Then we set one parameter

Because in the beginning steps


Next, equation (

By substituting Eq. (
If all 
In the condition of low frequency ω, namely, ω → 0,

In other words, when dis ≥ 2τvo, the disturbance is convergent and the queue keeps a stable state. Equation (
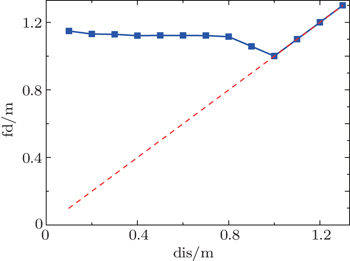
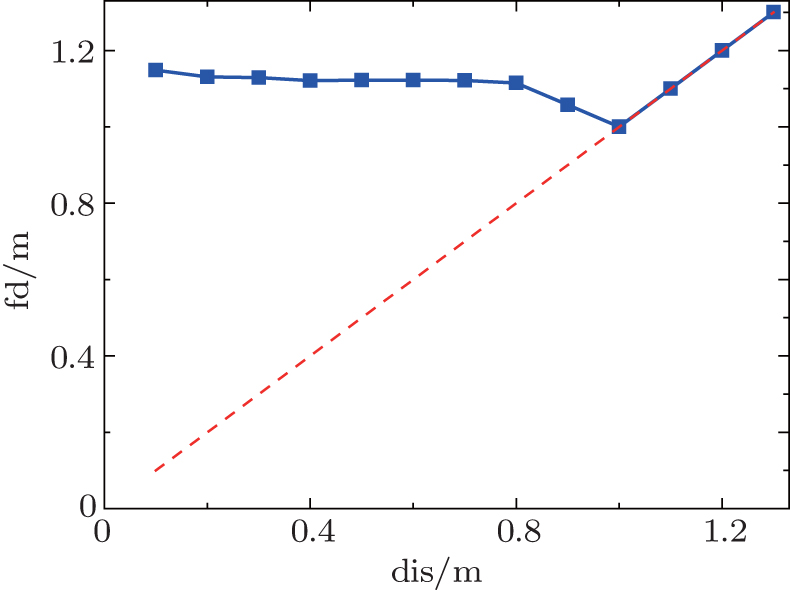 | Fig. 6. Distribution of the last two chasers’ (n−1 and n) final distance (fd) with variable dis. The red dashed line means the imaginary final distance in the assumption that disturbance is not divergent. In this simulation, n = 500, f f = 10−5, vo = 1.3, τ = 0.5 s, and time period is [0, 1000 s]. |
We use a delayed chasing model to mimic chasers in the queue with a slightly fluctuating target of the leader. It is found whether the queue can keep stable state or not depends on initial distance, desired velocity, and relaxation time. At a constant desired velocity and relaxation time, with increasing initial distance, the fluctuation in queue transforms from divergence to convergence. Even if there exists serious disturbance in queue, it will vanish in the end and return to stable with larger distances between neighbors. Moreover, the convergence analysis for this model is carried out, and shows that analytical convergence condition is in approximate agreement with those of simulations. Our results enhance the understanding of queue behavior that chasers should not follow leaders too close or react too slow. This rule may also be utilized in engineering design.
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 | |
| 21 | |
| 22 | |
| 23 | |
| 24 |