Successive lag synchronization on dynamical networks with communication delay
Zhang Xin-Jian, Wei Ai-Ju, Li Ke-Zan†, 
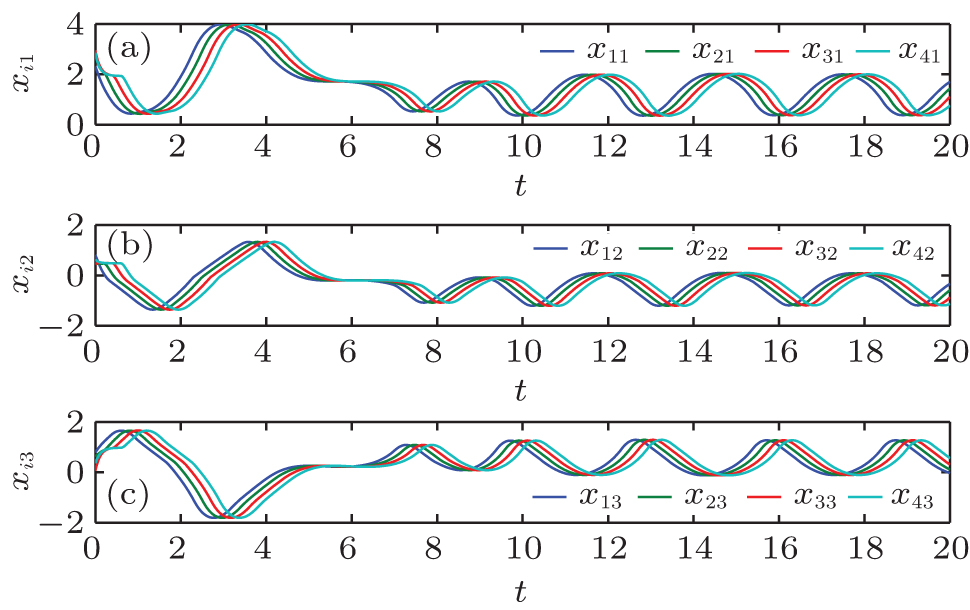
Trajectories of (a)
Successive lag synchronization on dynamical networks with communication delay |
|
Zhang Xin-Jian, Wei Ai-Ju, Li Ke-Zan†,
|
Trajectories of (a) |
| |