{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Multi-valued responses and dynamic stability of a nonlinear vibro-impact system with a unilateral non-zero offset barrier
[Xu Wei1, Huang Dong-Mei1, 2, †,  , Xie Wen-Xian1]
, Xie Wen-Xian1]
, Xie Wen-Xian1]
|
|


† Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant Nos. 11472212, 11532011, 11302171, and 11302172).
In this paper, multi-valued responses and dynamic properties of a nonlinear vibro-impact system with a unilateral nonzero offset barrier are studied. Based on the Krylov–Bogoliubov averaging method and Zhuravlev non-smooth transformation, the frequency response, stability conditions, and the equation of backbone curve are derived. Results show that in some conditions impact system may have two or four steady-state solutions, which are interesting and not mentioned for a vibro-impact system with the existence of frequency island phenomena. Then, the classification of the steady-state solutions is discussed, and it is shown that the nontrivial steady-state solutions may lose stability by saddle node bifurcation and Hopf bifurcation. Furthermore, a criterion for avoiding the jump phenomenon is derived and verified. Lastly, it is found that the distance between the system’s static equilibrium position and the barrier can lead to jump phenomenon under hardening type of nonlinearity stiffness.
Vibrating systems or devices with clearance or gaps between moving parts are frequently encountered in the aeronautical, civil, and mechanical engineering fields, particularly in mechanisms and machines,[1,2] such as ships colliding with fenders,[3] rattling of gear boxes,[4] structural interaction in piping systems,[5] and nonlinear soil-structure interaction.[6] This type of systems or devices with repeated impact is called vibro-impact systems or impacting oscillators. Due to the existence of the impact, a vibro-impact system presents strong nonlinearity and discontinuity, accompanied with rich and complicated dynamic behaviors. Therefore, the analyses of the impact motion are important in the proper design of the corresponding machines and devices.[7] Notable contributions were made by many researchers,[8–25] and some interesting phenomena, such as grazing bifurcation,[9] codimension two bifurcation,[11] and torus bifurcation,[14] chatter and sticking motions were observed in the vibro-impact systems.
However, vibro-impact systems, as one kind of non-smooth systems, always have troubles due to their inherent difficulty of analytical study. The main difficulty depends on the additional finite relations between impacts and rebound velocities. On one hand, the impact instants could not predict in advance, but are governed by the equations of motion. Thus, it is reasonable that the impact instants are described by constraints which depend on the state of systems. On the other hand, the impact instants govern the corresponding velocity jumps, i.e., the differential equations of motion on the impact instants are complemented by impact conditions. The previous literatures, which were related to the frequency response of vibro-impact systems, mainly concentrated on traditional frequency responses with single-valued response[16,18] or three-valued response (with jump). However, for more complicated multi-valued responses,[24] such as two-valued and four-valued responses, especially the frequency island phenomenon in the vibro-impact systems, which are not mentioned. For this purpose, we consider the same oscillators as that in Ref. [21], and estimate the multi-valued responses and dynamic properties of the system.
This paper is organized as follows. In Section 2, by using the non-smooth transformation the vibro-impact system is transformed a non-impact system. In Section 3, the Krylov-Bogoliubov averaging method is used to obtain the frequency response equation and the backbone curve equation. By using the linearization method, the stability conditions are derived. In Section 4, the directly numerical simulation is carried out to verify the analytical results obtained in Section 3, the effects of system parameters on the dynamic behaviors are revealed. The classification of the steady-state solutions is discussed. Finally, conclusions are presented in Section 5.
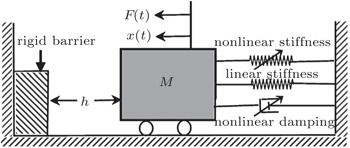
A general nonlinear vibro-impact oscillator with a unilateral nonzero offset barrier is considered, and the schematic model of this oscillator is shown in Fig.


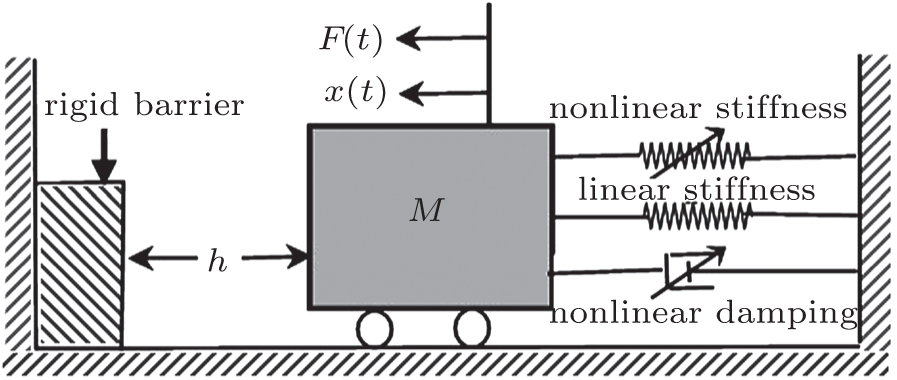 | Fig. 1. Schematic model of the vibro-impact oscillator with a unilateral rigid barrier. |
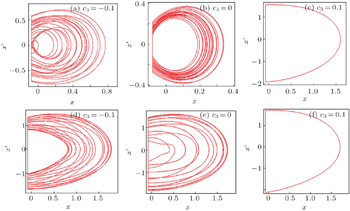
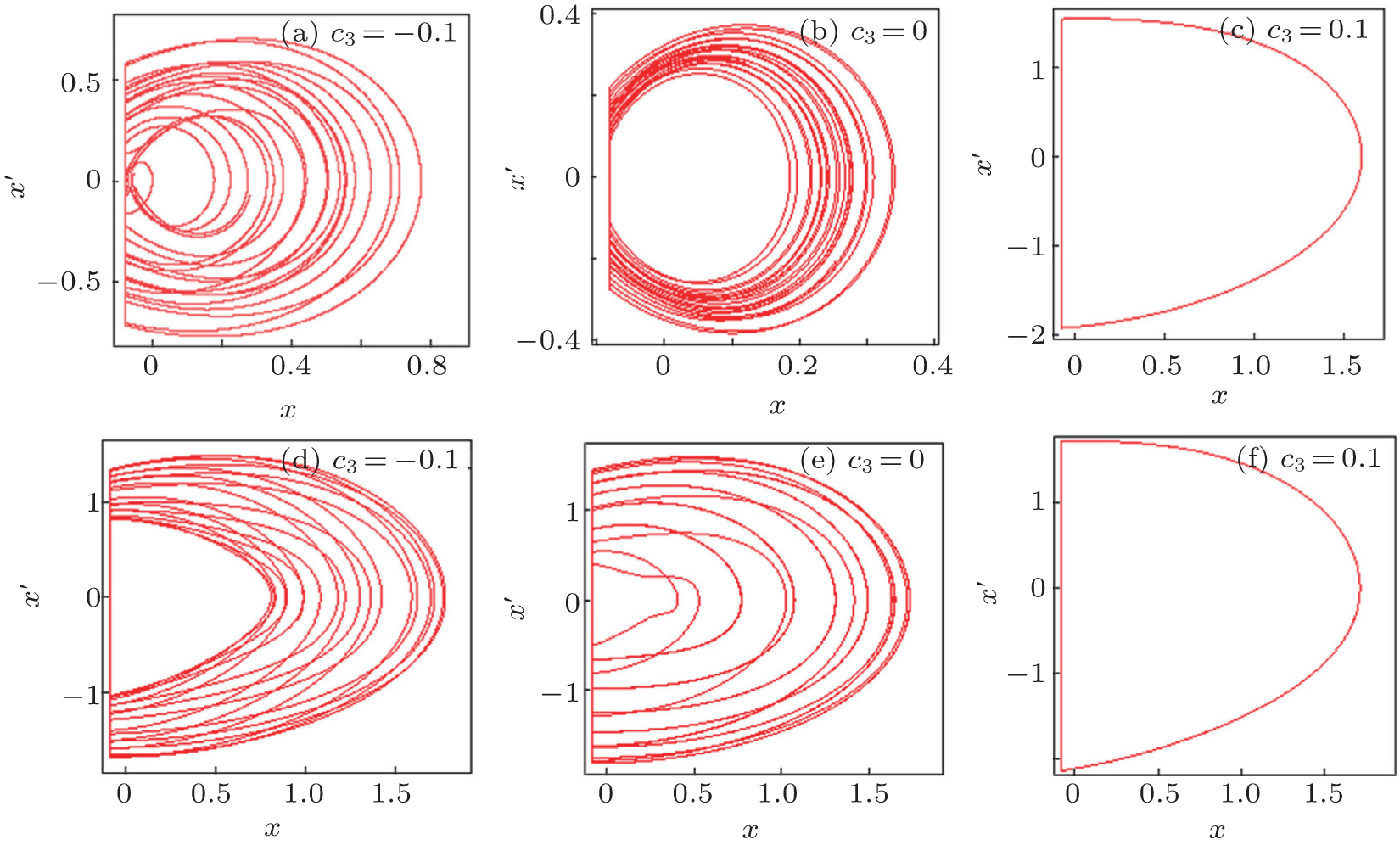 | Fig. 2. Phase portraits of system (1) for Ω = 2.08: (a)c1 = 0.1, c3 = −0.1; (b) c1 = 0.1, c3 = 0.0; (c) c1 = 0.1, c3 = 0.1; (d) c1 = 0.2, c3 = −0.1; (e) c1 = 0.2, c3 = 0.0; (f) c1 = 0.2, c3 = 0.1. |
By using the non-smooth transformation[25]

According to Eq. (

Thus, the jump of converted velocity ẏ becomes proportional 1 − r instead of 1 + r for the jump of original velocity ẋ. It is reasonable to use the Dirac function to introduce this jump into the equation of motion as an additional impulsive damping term.
Since y(t* ±0) = y(t*) = 0 and ẏ± = ẏ(t* ± 0), by introducing the Dirac function δ (y(t*)) = δ (t − t*)/|ẏ| and further combining with ẏ(t)δ (t − t*) = ẏ(t*)δ (t − t*), the impulsive term can be obtained

According to Eqs. (

Therefore, the original system with impact is reduced to one without impact expressed by Eq. (
For the necessity of the Krylov-Bogoliubov averaging method, we may assume that the parameter c1, c2, c3, h, and 1 − r are all small and proportional to a small parameter, then the asymptotic method of averaging to one period can be used to analyze Eq. (

In order to use the averaging method, the following transformation is used to Eq. (

The right sides of Eqs. (
The steady-state solutions of Eqs. (
According to Eqs. (
For given parameters of system (

Substituting Eq. (
According to the characteristic equation of the coefficient matrix of Eqs. (

Particularly, the stability and classification of the steady-state solutions determined by the sign of Σ1, Σ2, and 
In this section, by combining the numerical simulation, the analytical results can be verified, the frequency response is constructed by using the fourth-order Runge–Kutta algorithm. For the non-smooth characteristic of the impact system, two types of step size to improve the computation precision are chosen. Firstly, the large time step size t0can be chosen. Once the displacement x is less than or equal to −h, we pull back the oscillator to the former step position and integrate Eq. (
The parameters of the system are listed as follows: ω0 = 1.0, r = 0.8, h = 0.08, c2 = 0.15, and f = 0.3. Three cases of the nonlinearity intensity (c3 = −0.1, c3 = 0.0, and c3 = 0.1) are considered, respectively. In order to confirm the existence of impact in system (
In the first case, damping coefficient c1 = 0.1 is considered. In Fig.
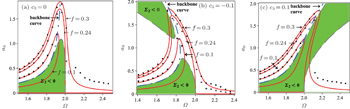
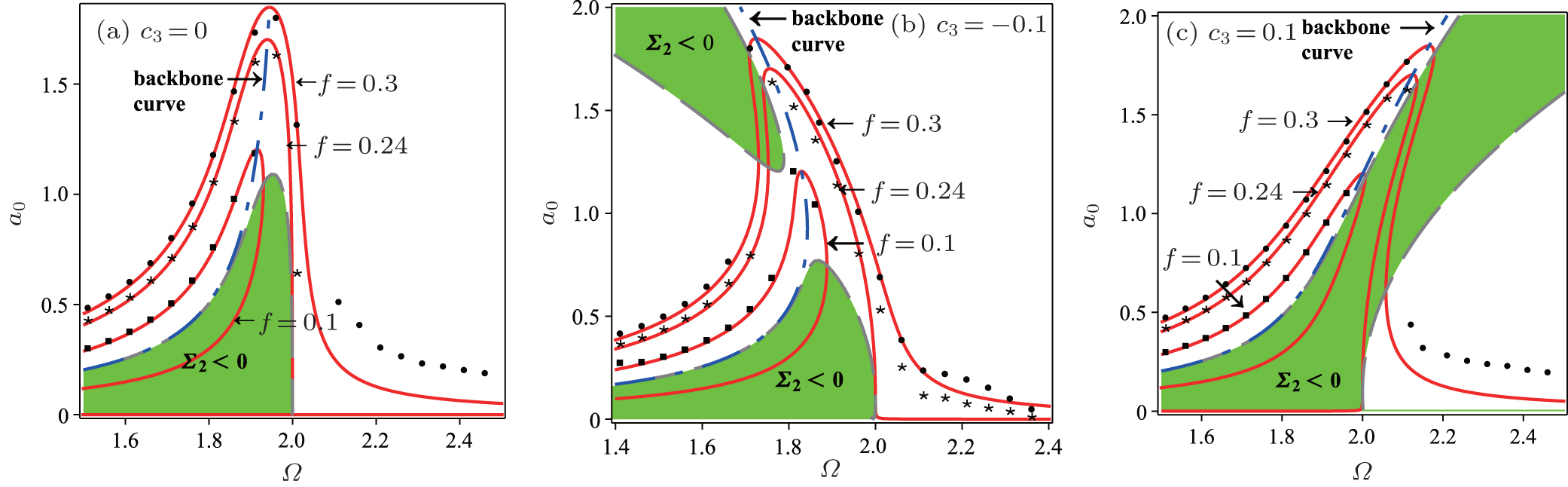 | Fig. 3. Steady-state responses of system (1): (a) c1 = 0.1, c3 = 0.0; (b) c1 = 0.1, c3 = −0.1; (c) c1 = 0.1, c3 = 0.1. Solid lines: analytical results; the marks of ◼, *, and •: numerical results; dashed line: stability boundaries; and dash-dotted lines: Backbone curves. |
| Table 1. Critical values of excitation frequency Ω for the boundary of two steady-state solutions. . |
The effectiveness discussed above is also verified by the stability boundaries, the dash lines as shown in Fig.
As a comparison, figure
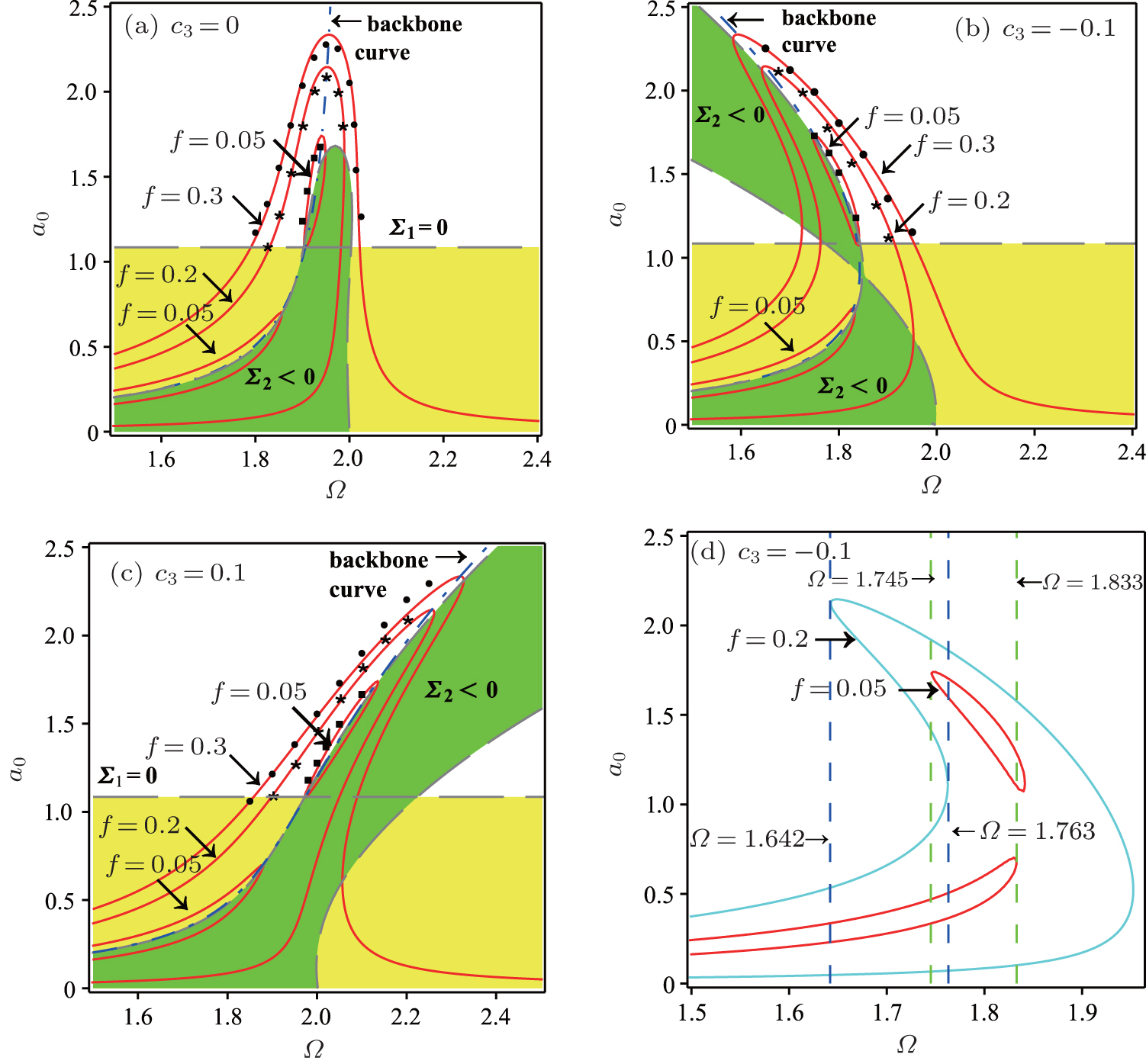 | Fig. 4. Steady-state responses of system (1): (a) c1 = 0.2, c3 = 0.0; (b) c1 = 0.2, c3 = −0.1; (c) c1 = 0.2, c3 = 0.1. Solid lines: analytical results; the marks of ◼, *, and •: numerical results; dashed line: stability boundaries; and dash-dotted lines: Backbone curves. |
| Table 2. Multi-valued response characteristic of the system for c1 = 0.2. . |
As a result, the stability characteristic is also very different from the case of c1 = 0.1. Only the steady-state solutions above the dash line Σ1 = 0 and outside the region Σ2 < 0 are attainable, which is similar to the results derived in Ref. [28]. As can be seen that for the frequency island response only the branch with the largest amplitude is stable and the steady-state solutions on the mainland are unstable, which is different from the case shown in Ref. [29]. These findings are checked numerically by carrying out direct integration of system (
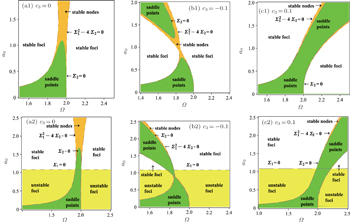
As discussed in Section 3, the responses are quite different for different damping coefficient c1 and nonlinear stiffness c3; therefore, the classification of the steady-state solutions is also very different. In the following part, it can be analyzed specifically.
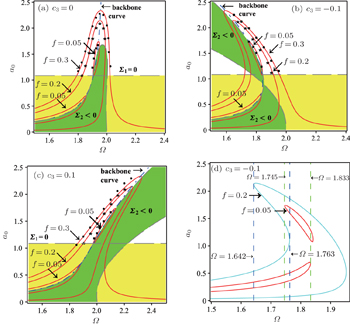
The stability classification[27] is illustrated in Fig. 
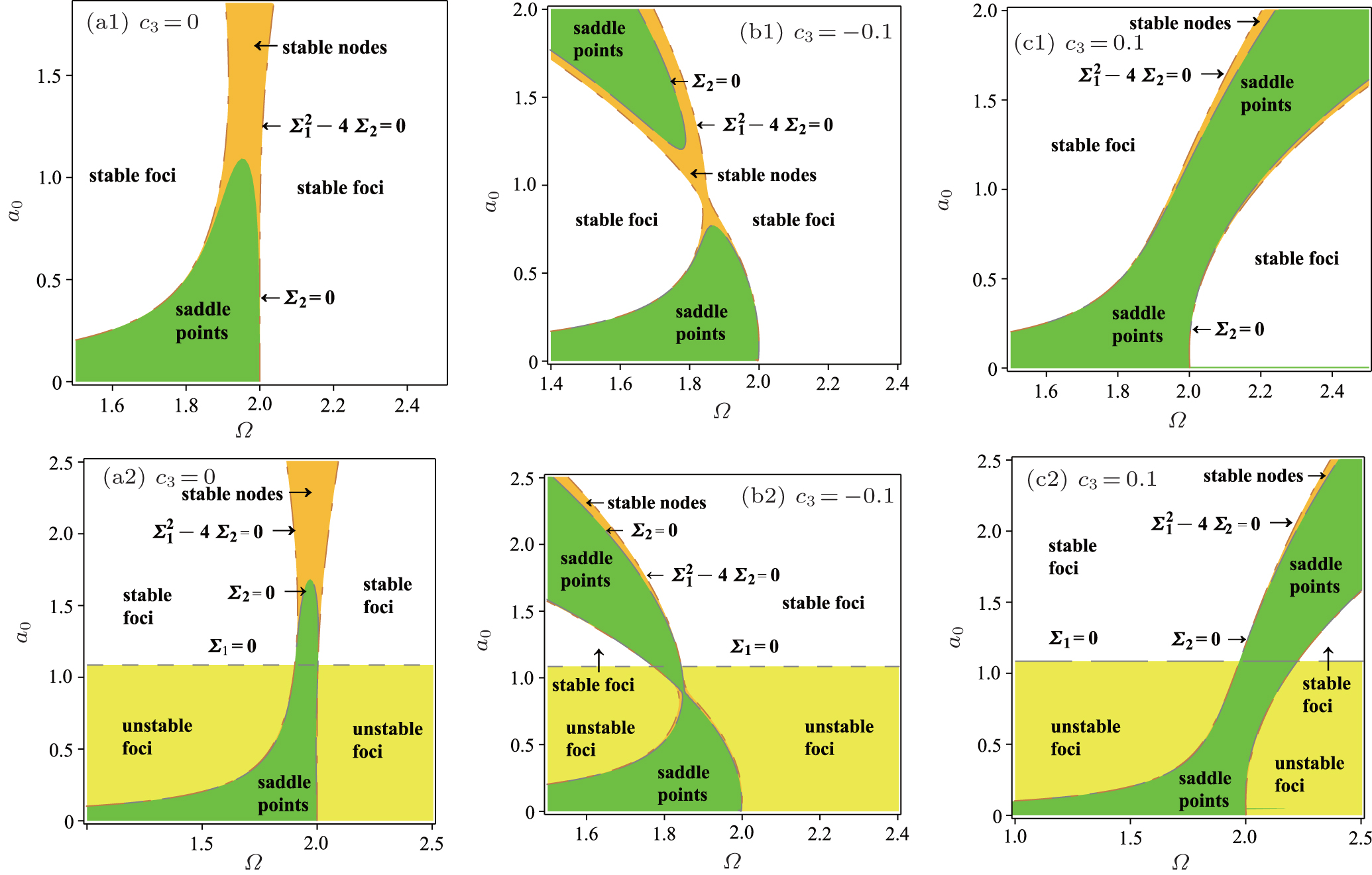 | Fig. 5. Classification of the steady-state solutions: (a1) c1 = 0.1, c3 = 0.0; (b1) c1 = 0.1, c3 = −0.1; (c1) c1 = 0.1, c3 = 0.1; (a2) c1 = 0.2, c3 = 0.0; (b2) c1 = 0.2, c3 = −0.1; (c2) c1 = 0.2, c3 = 0.1. |
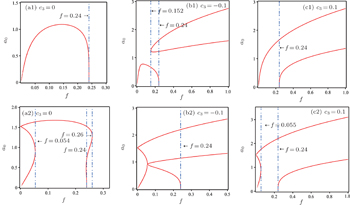
In previous sections, the existence of the saddle node bifurcation which results in the jump phenomenon is found. A jump will occur as long as there are two points on the steady-state response curve with a vertical slope,[30–32] corresponding to dΩ/da0 = 0. The jump can be avoided if it can be ensured that the frequency response of the system is unique. According to Eq. (



Differentiating both sides of Eq. (


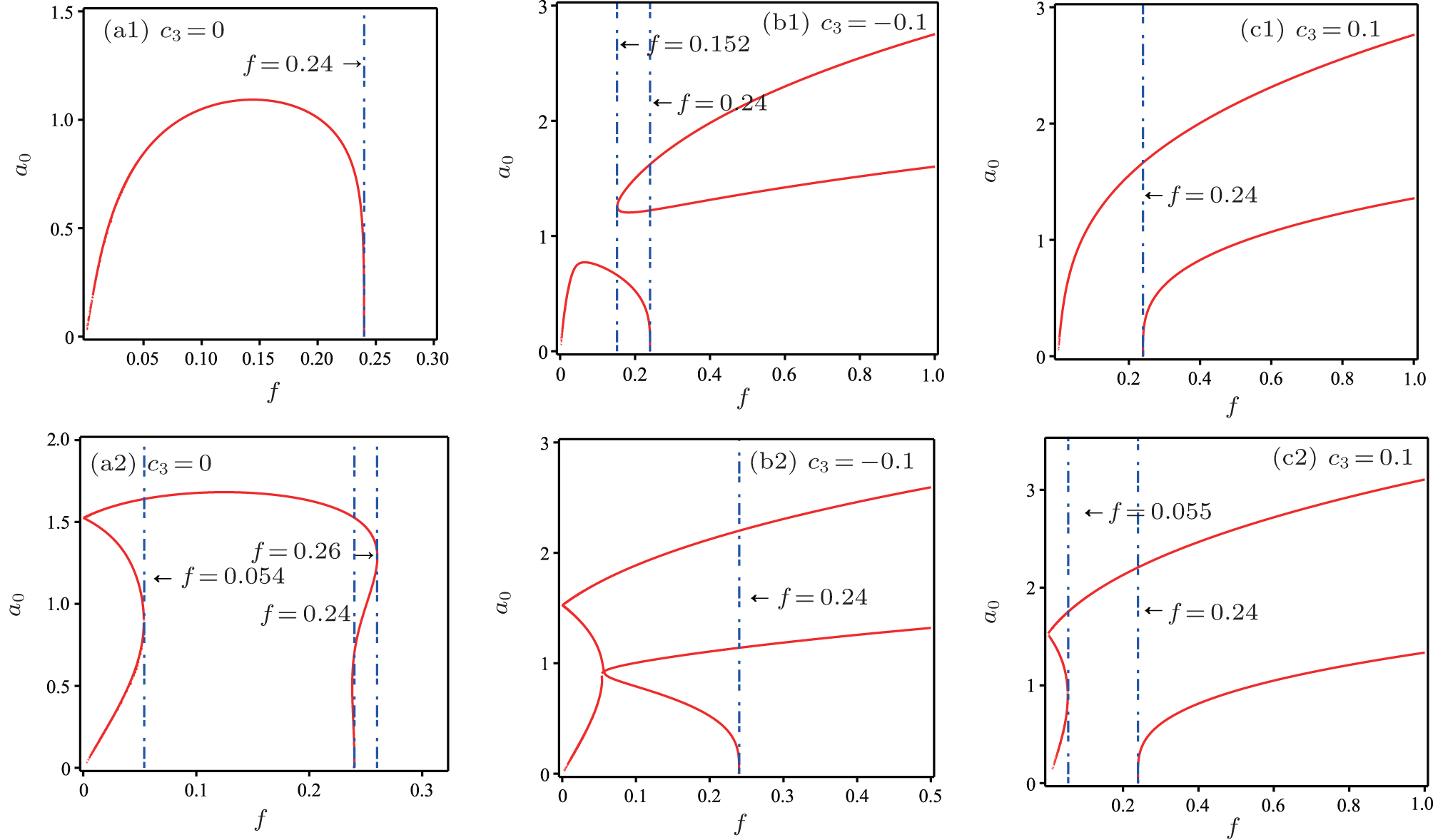 | Fig. 6. Response analysis according to jump avoidance condition: (a1) c1 = 0.1, c3 = 0.0; (b1) c1 = 0.1, c3 = −0.1; (c)c1 = 0.1, c3 = 0.1; (a2) c1 = 0.2, c3 = 0.0; (b2) c1 = 0.2, c3 = −0.1; (c2) c1 = 0.2, c3 = 0.1. |
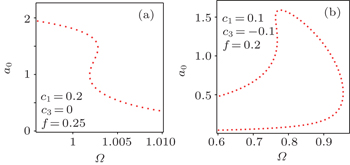
Next, as shown in Fig.
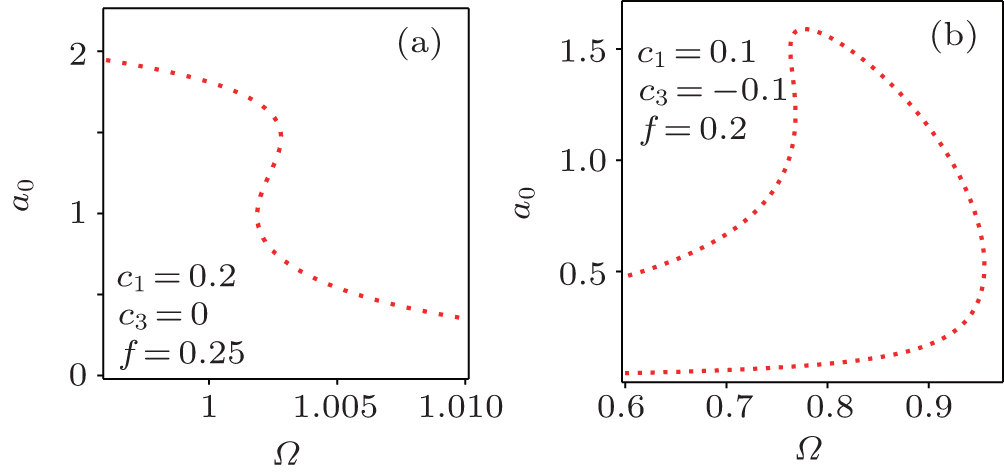 | Fig. 7. Frequency response of system ( |
For c3 = −0.1 and c1 = 0.1, as shown in Fig.
For c3 = 0.1 and c1 = 0.1, as shown in Fig.
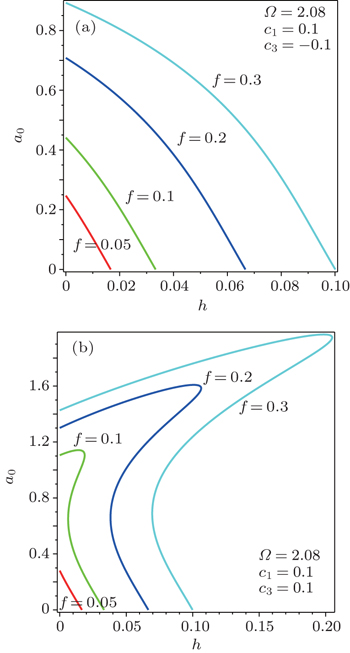
When the excitation frequency is fixed at Ω = 2.08, the distance h is varied. The steady-state response of a0 is shown in Fig.
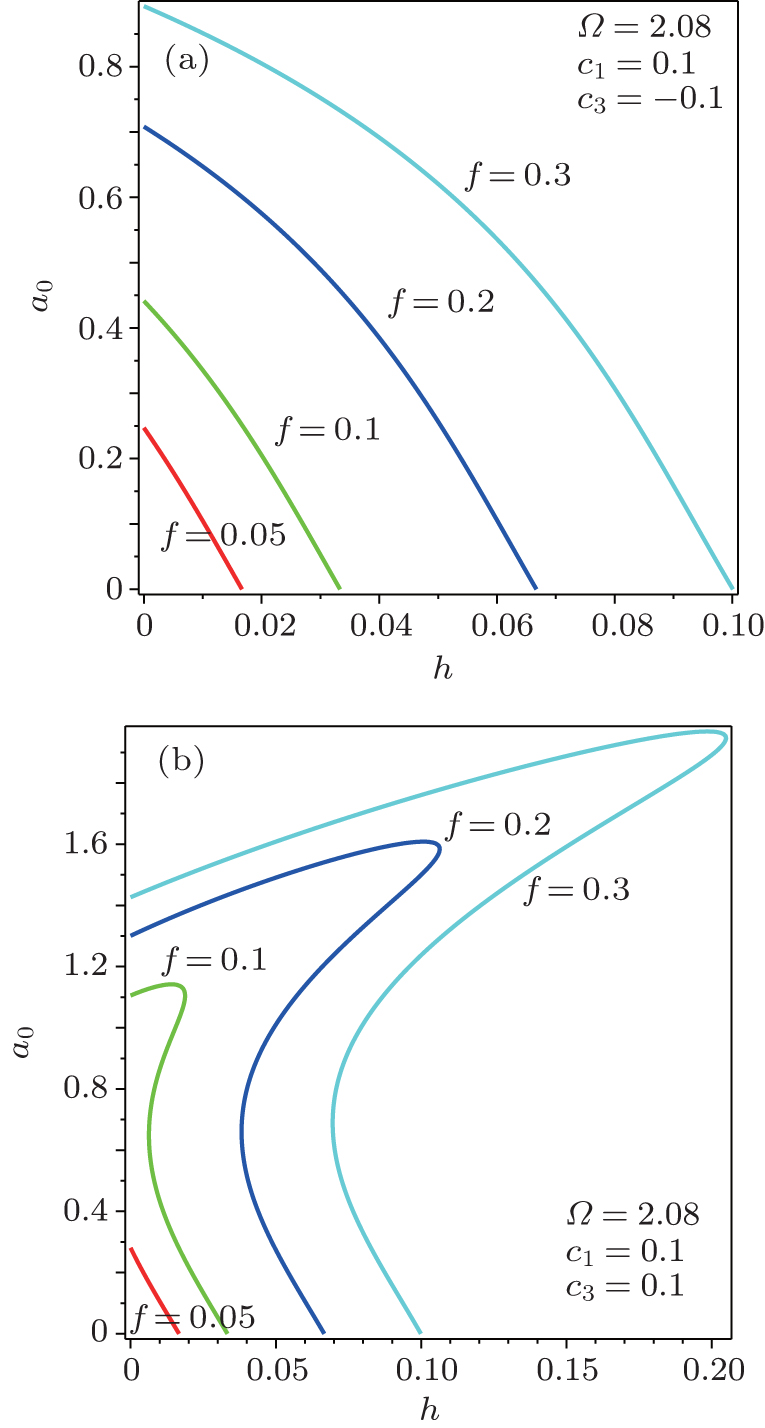 | Fig. 8. Effects of the distance h on the steady-state response: (a) c3 = −0.1; (b) c3 = 0.1. |
As can be seen that, when the nonlinear stiffness is of softening type, with the increase of the distance h, the steady-state response from the maximum value keeps decreasing to zero in spite of different values of excitation amplitude. However, when the nonlinear stiffness is of hardening type, with larger excitation amplitude, three-valued and two-valued responses can be induced. Obviously, when f = 0.1, with the increase of h there exists a small interval in which the response is three-valued. For f = 0.2 and f = 0.3, as described in Table
| Table 3. Multi-valued response characteristic of the system with hardening type of stiffness. . |
The multi-valued responses and dynamic stability of a nonlinear vibro-impact system with a unilateral non-zero offset barrier are analyzed in this paper. Using the Zhuravlev non-smooth transformation and Krylov–Bogoliubov averaging method, the frequency response, the critical equation for the stability boundary are derived. Meanwhile, the backbone curves are also obtained. Then, by combining numerical simulation, we further investigate the effects of the parameters on the responses of the vibro-impact systems. It is found that multi-valued response, especially two-valued and four-valued responses, exist in the vibro-impact system. Meanwhile, the damping coefficient can induce the frequency island phenomenon, which is verified by the direct simulation results. In addition, the condition for suppressing the jump phenomenon is derived, and by using this condition the characteristic of multi-valued response is also confirmed. The classification of the steady-state solutions is discussed. Finally, the distance between the system’s static equilibrium position and the barrier can induce two-valued and three-valued responses when the nonlinear stiffness is of hardening type.
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 | |
| 21 | |
| 22 | |
| 23 | |
| 24 | |
| 25 | |
| 26 | |
| 27 | |
| 28 | |
| 29 | |
| 30 | |
| 31 | |
| 32 |