{kind=link}
{kind=link}
{kind=link}
{kind=link}
Data point selection for weighted least square fitting of cavity decay time constant
[He Xing 1, 2, 3 , Yan Hu 1, 2, 3 , Dong Li-Zhi 1, 2 , Yang Ping 1, 2 , Xu Bing 1, 2, †,  ]
]
]
|
|


† Corresponding author. E-mail:
Project supported by the Preeminent Youth Fund of Sichuan Province, China (Grant No. 2012JQ0012), the National Natural Science Foundation of China (Grant Nos. 11173008, 10974202, and 60978049), and the National Key Scientific and Research Equipment Development Project of China (Grant No. ZDYZ2013-2).
For the accurate extraction of cavity decay time, a selection of data points is supplemented to the weighted least square method. We derive the expected precision, accuracy and computation cost of this improved method, and examine these performances by simulation. By comparing this method with the nonlinear least square fitting (NLSF) method and the linear regression of the sum (LRS) method in derivations and simulations, we find that this method can achieve the same or even better precision, comparable accuracy, and lower computation cost. We test this method by experimental decay signals. The results are in agreement with the ones obtained from the nonlinear least square fitting method.
The cavity ring-down (CRD) technique is a sensitive detection technique for measuring weak absorption [ 1 ] or high reflectivity. [ 2 ] The laser beam, pulsed or continuous, is firstly coupled into a ring-down cavity (RDC). After the laser pulse is injected or the continuous wave is suddenly shut off, the intensity of the output optical signal of RDC, I , will decay exponentially with time t , [ 1 ]


There are a lot of extraction methods adopted in the CRD technique, including the nonlinear least square fitting (NLSF) algorithm [ 4 – 7 ] such as the Levenberg–Marquardt (LM) algorithm, the weighted least square (WLS) method, [ 5 , 8 ] and the extractions based on Fourier transform (FT) [ 9 , 10 ] or linear regression of sum (LRS) [ 11 ] of the decay signal, etc. Their extraction performances have been analyzed and compared by several papers [ 12 – 15 ] where the extraction precision, accuracy, and computation cost of each method were comprehensively considered. Their analyses indicated the NLSF method can achieve the finest precision. However, the computation cost of the NLSF method may be a little high because it increases usually with the increase of iterations, so references [ 14 ] and [ 15 ] both recommended the LRS (also known as corrected successive integration, CSI) method to extract the cavity decay time finally. They found that the LRS method can achieve comparable extraction performance with the NLSF method, [ 14 , 15 ] which is its main advantage over the WLS and FT methods. Besides, the LRS method takes lower computation cost than the WLS method. [ 14 ] However, we find that the extraction performance of the WLS method is highly related to the number of data points. By selecting proper data points for fitting, the WLS method can achieve fine performance and low computation cost simultaneously. The main drawback of the WLS method is that it is sensitive to offset. It is thought that nonzero offset brings deviation because the logarithm of the decay signal is nonlinear; whereas zero offset results in information loss when calculating the logarithms of negative data points. [ 5 ]
In this paper, we focus on the effect of offset and explore it from the calculation procedure of the WLS method. We find that the WLS method needs data point selection in theory, so we supplement a theoretical data point selection to the common WLS method. This improved method is referred to as the WLS-DS method. Its expected precision, accuracy, and computation cost are also derived. According to these derivations and the corresponding simulations, we find the WLS-DS method can actually take a lower computation cost than the LRS and the NLSF methods to achieve the comparable or nearly the same fitting performance. Finally, we test the WLS-DS method by actual decay signals of an optical feedback cavity ring-down (OF-CRD) [ 16 , 17 ] setup.
If there is no excitation of the multiple cavity mode, the decay signal of RDC will be monoexponential. After recording and digitalizing, the decay signal S can be given by





Traditionally, this constant is set to be zero to eliminate the deviation caused in linearization. [ 1 , 5 ] However, we find this constant can also be set to be a positive value b , provided that the following inequality holds:






In the WLS-DS method, the information loss caused by zero offset can be expected to be mitigated because there are fewer or even no negative data points in fitting, meanwhile the deviation of nonzero offset is limited by the data point selection based on Eq. (
An extraction method (even an improved one) should be assessed by three requirements which are precision, accuracy, and computation cost. [ 12 , 14 ] A noticeable point is that these requirements are not mutually independent of each other. In fact, they are all related to the number of data points, N or K here. We should not ignore this point in the following assessments and comparisons.
As indicated in Ref. [ 12 ], a Δ t ≪ 1 and f Δ t ≈ 1, where f is the reciprocal of the systemic response time t f and Δ t is the time interval of data acquisition, are required by a CRD system. As for our CRD system, Δ t is 12.5 ns (80 MS/s sampling) and t f has been measured by Gong and Li [ 18 ] that was less than 20 ns. The typical a of our CRD system is in a range of (0.5 − 1) × 10 6 s −1 which corresponds to 1–2 μs cavity decay time. Both of these hardware limitations are met. If we further assume that σ , the standard deviation value of offset, is constant, we can make our derivations in the following.
At first, we must notice that A 0 and a 0 should be regarded as independent constants in the WLS-DS method, and b is a preset parameter. Under these conditions, we can write the expression of expected precision of a fit according to error propagation [ 19 ]





To find the relations between σ 2 ( a fit ) and those method parameters, such as a , A , Δ t , etc., we let K approach to infinity meanwhile a Δ t approaches to zero to obtain the following equation:

Then, we analyze the expected fitting bias by the method introduced by Lehmann and Huang. [ 12 ] In Eq. (
Actually, the last term on the right-hand side of Eq. (

As a Gaussian-distributed variable, ⟨offset 2 ⟩ = σ 2 . Thus, we can deduce the ensemble average value of the last term on the right-hand side of Eq. (

Combining Eq. (

If we assume that there is no initial guess error, i.e., A 0 = A and a 0 = a , equation (

Because Δ a fit is positive, the fitted τ of the WLS-DS method is always smaller than the real value.
Based on Eqs. (
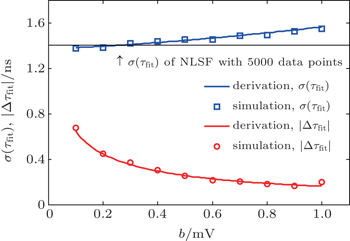
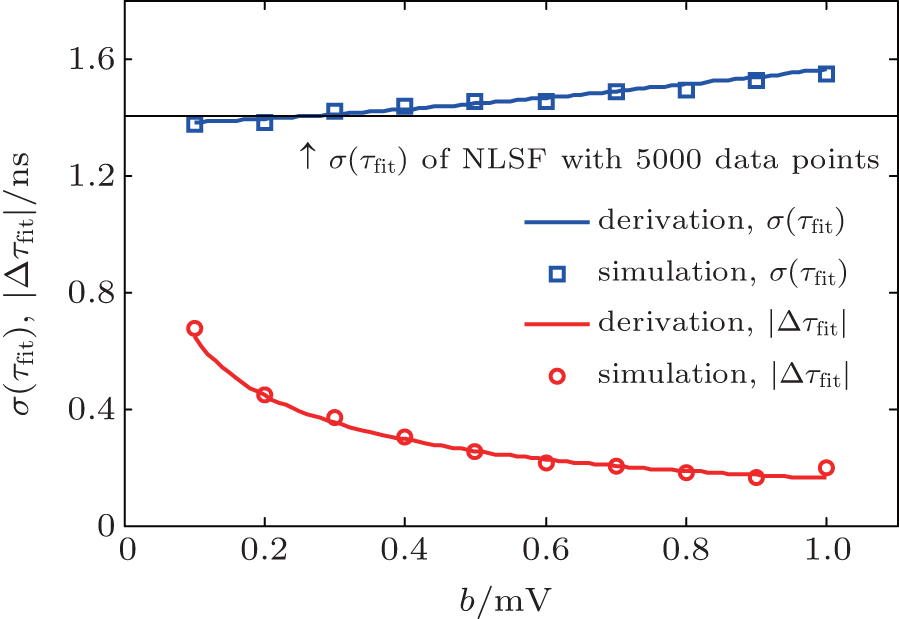 | Fig. 1. Comparisons between derivations and simulations of expected precision and accuracy. When b = 0.2 mV (corresponding to K = 375), the precision of the WLS-DS method is better than that of the NLSF method with 5000 data points (the solid black line in Fig. |
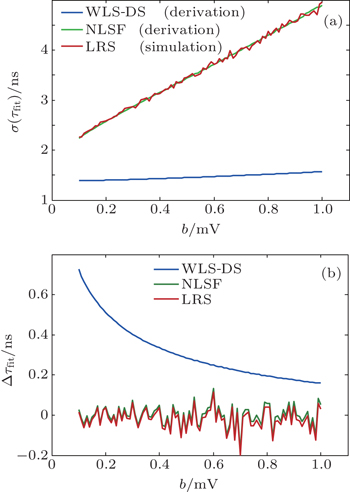
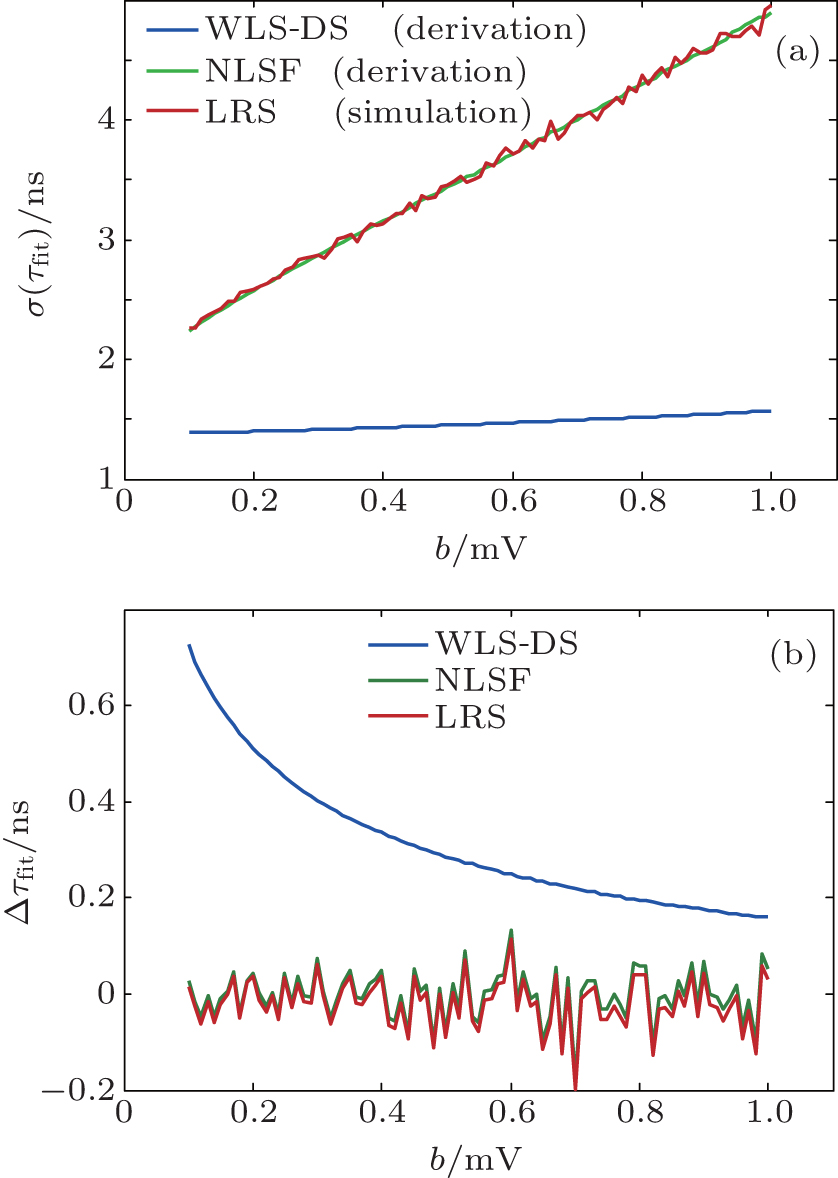 | Fig. 2. Comparisons of the WLS-DS method with the NLSF and the LRS methods. In panel (a), the NLSF and the LRS methods are both executed by using the selected data points of the WLS-DS method. The derivation of NLSF precision in panel (a) has been achieved by Ref. [ 12 ]. However, for the LRS method, its precision and accuracy are too complicated to give closed forms, [ 12 ] so our presentation of the LRS method is based on simulations. Y -axes in panels (a) and (b) are in different ranges, which indicates Δ τ fit is smaller than σ ( τ fit ). |
The comparisons of performances are given in Fig.
Finally, the computation cost of the WLS-DS method is also considered. It seems that more than 10 multiplications and 7 additions per data point are needed at a glance of Eq. (




The computation costs of the NLSF and the LRS methods have been derived by Lehmann and Huang. [ 12 ] They found that at least 6 floating point calculations (3 additions and 3 multiplications) are needed for a single data point in the NLSF extraction, and at least 13 floating point calculations (8 additions and 5 multiplications) are needed for a single data point when using the LRS method. However, these two methods need more data points to achieve a fine fitting performance. In the typical case of our laboratory, the computation costs of these three methods to achieve the precision of 1005 s −1 (±1.45 ns) are presented in Table
| Table 1. Comparisons of computation cost among NLSF, the LRS, and the WLS-DS methods. . |
We can see the computation cost of the WLS-DS method is lower than those of the NLSF and LRS methods.
Let b approach to zero, we can achieve the common WLS fitting. Combining former derivations and the tendency of the WLS-DS method in Fig.
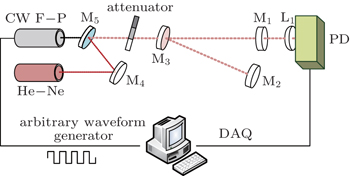
Our experimental OF-CRD setup is presented in Fig.
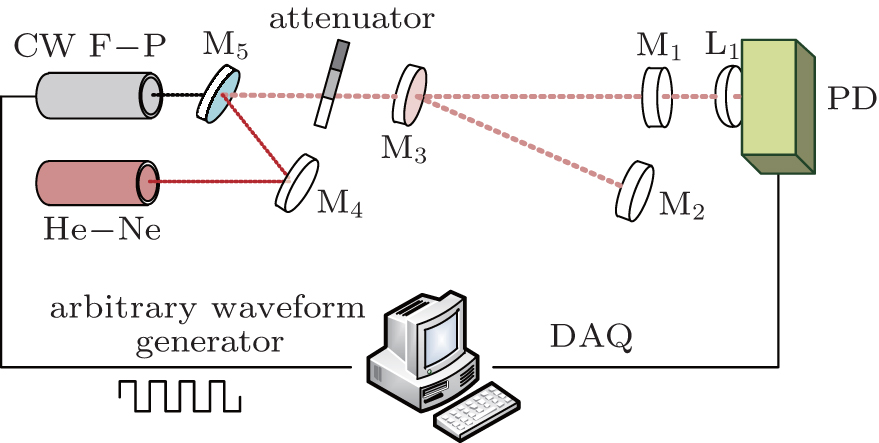 | Fig. 3. Schematic setup of the OF-CRD system. The dot lines are light paths, and the solid lines are signal paths. |
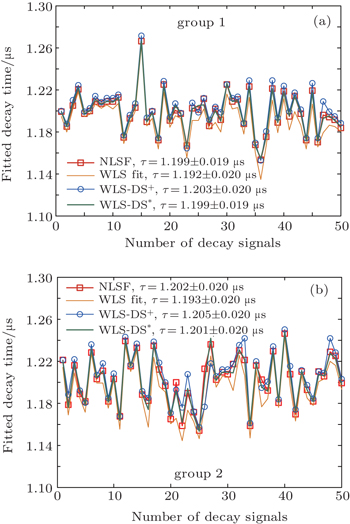
Two groups of 50 decay signals were recorded and analyzed by the NLSF method (the LM algorithm was applied here), the common WLS method, and the WLS-DS method respectively. Here, the NLSF method was chosen as the standard because the LM algorithm has been regarded as the defacto standard in the CRD technique. [ 9 ] The theoretical value of the decay time constant is dependent on the incident angle of M 3 , so it is hard to know beforehand, but it can be approximately determined to be 1.2 μs according to our former experiments. Therefore, the initial guess τ was set to be 1.2 μs, A 0 was set to be a maximum of the decay signal, and offset was calculated beforehand by averaging the tails of several decay signals. Each original decay signal was truncated so only 4000 data points were contained. The mean value of the initial amplitude of decay signals was 0.938 V; statistics indicated that the background offset was 0.019 ± 0.004 V. According to the former simulations, we deduced that the WLS-DS method could give almost the same precision as the NLSF algorithm; meanwhile the accuracy was also comparable. The fitting results are shown in Fig.
As detailed in Fig.
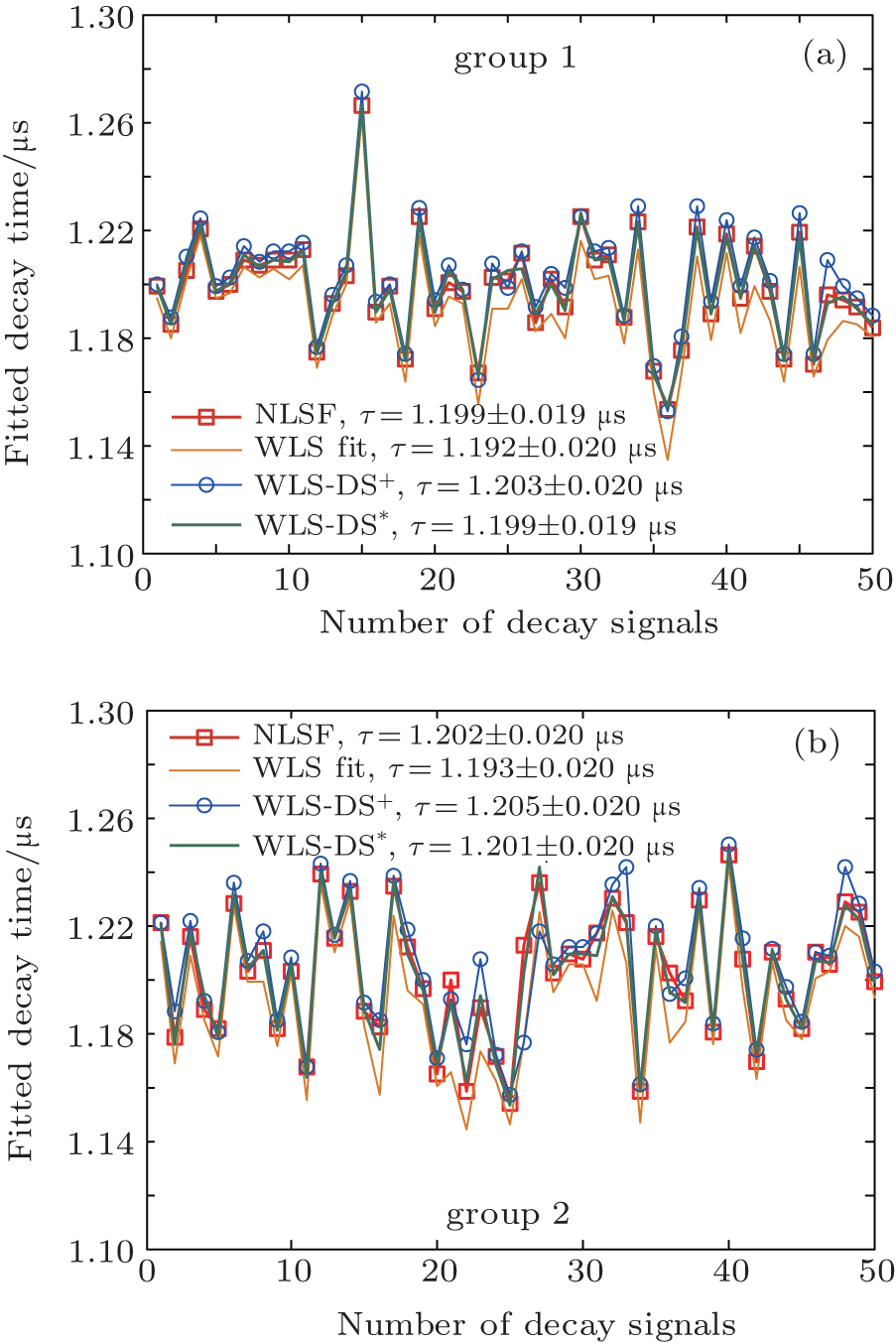 | Fig. 4. Fitting results of experiment. There are two notes in this figure. Note that the + means that the results of this curve are obtained by the WLS-DS method with b = 0.5 mV and k = 0.01 (blue lines). Note * means that the results of this curve are obtained by the WLS-DS method with b = 1 mV and k = 0.01 (green lines). The WLS fit is corresponding to the common WLS method which uses the total decay signal to fit. (a) Group 1, (b) group 2. |
| Table 2. Comparisons of data point number for cavity decay time extraction. . |
Comparable fitting performance with the NLSF algorithm was obtained for the WLS-DS method. Furthermore, former derivations and simulations prove that the WLS-DS method takes a lower computation cost in fact. With this obvious improvement, the WLS-DS method, one of the advanced linear fitting methods, can be a potential high accuracy and fine precision decay time extraction method in the CRD technique.
In this paper, a WLS-DS method of extracting the cavity decay time is introduced by deducing the calculation procedures of the WLS method. With a theoretical data point selection procedure contained, it can mitigate the effect brought by the system noise and the instrumental offset to achieve a high accuracy result. After comparing with the NLSF algorithm and LRS method by derivations and simulations, we find that this method can obtain the same or even better precision and comparable accuracy in lower computation cost. The WLS-DS method can be a convenient and useful data processing approach in the CRD technique; furthermore, with its advantage of low computation cost, it could play a more important role in the real-time CRD system.
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 |