{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Joint transfer of time and frequency signals and multi-point synchronization via fiber network
[Cheng Nan 1 , Chen Wei 1 , Liu Qin 2 , Xu Dan 1 , Yang Fei 1 , Gui You-Zhen 2, †,  , Cai Hai-Wen 1, ‡, ]
, Cai Hai-Wen 1, ‡, ]
, Cai Hai-Wen 1, ‡, ]
|
|

 , Cai Hai-Wen 1, ‡,
, Cai Hai-Wen 1, ‡,
† Corresponding author. E-mail:
‡ Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant No. 61405227).
A system of jointly transferring time signals with a rate of 1 pulse per second (PPS) and frequency signals of 10 MHz via a dense wavelength division multiplex-based (DWDM) fiber is demonstrated in this paper. The noises of the fiber links are suppressed and compensated for by a controlled fiber delay line. A method of calibrating and characterizing time is described. The 1PPS is synchronized by feed-forward calibrating the fiber delays precisely. The system is experimentally examined via a 110 km spooled fiber in laboratory. The frequency stabilities of the user end with compensation are 1.8×10 −14 at 1 s and 2.0×10 −17 at 10 4 s average time. The calculated uncertainty of time synchronization is 13.1 ps, whereas the direct measurement of the uncertainty is 12 ps. Next, the frequency and 1PPS are transferred via a metropolitan area optical fiber network from one central site to two remote sites with distances of 14 km and 110 km. The frequency stabilities of 14 km link reach 3.0×10 −14 averaged in 1 s and 1.4×10 −17 in 10 4 s respectively; and the stabilities of 110 km link are 8.3×10 −14 and 1.7×10 −17 , respectively. The accuracies of synchronization are estimated to be 12.3 ps for the 14 km link and 13.1 ps for the 110 km link, respectively.
Precise time and frequency signal dissemination have significant applications in scientific research such as very long baseline interferometry (VLBI), deep space network (DSN) and metrology. Aside from the satellite-based systems, [ 1 ] optical fiber has become an attractive alternative medium for transferring time and frequency signals, offering much improved accuracy. [ 2 – 11 ] In many applications, such as VLBI, DSN and navigation, the synchronization of clocks at different locations is a basic requirement. Joint dissemination of the time and frequency signals and synchronization via fiber networks have been widely proposed and demonstrated in recent years. [ 3 – 8 ] In the fiber system, the signals often suffer time delay noises caused by temperature fluctuations and vibrations. It is necessary to acquire the delay fluctuation and to compensate for it actively. One method is to incorporate the 1 PPS signal into the square wave frequency signal; and the delay fluctuations of the two signals are simultaneously compensated for by an application-specific integrated circuit. [ 4 , 5 ] The other method is to use two lasers with different wavelengths to transmit the two signals and combine them with DWDM. The fluctuations of the two signals are independently compensated for in two electrical compensation systems. [ 6 ] It was found that the accuracies of the time delay measurement and control are mainly limited by the jitter of the equipment, so that the averaging of multiple measurements is used to reduce the error of time delay for their time signal with 500 Hz repetition rate. In our previous work, the joint dissemination of 1PPS time signal and 100 MHz sinusoidal frequency signal by using two lasers with different wavelengths was achieved based on DWDM via an 80 km spooled fiber in the laboratory, [ 9 ] and the joint time and frequency dissemination network was tested in the laboratory, which transferred time and frequency to multiple users through a tree-like fiber network with a noise compensation system at each remote site via 50 km fiber link. [ 10 ]
In this paper, we demonstrate a time (1PPS) and frequency signal dissemination and time synchronization system based on the metropolitan fiber network. Since the repetition rate is only one pulse per second, the averaging method is not suitable. Instead an optical compensation setup is used, in which the phase fluctuation of frequency signal (1GHz) is detected and used to feedback control the compensation setup, and to stabilize the delay of fiber link by compensating for the delay fluctuations. In addition, by precisely calibrating the instrumental delay of the system and measuring the propagation delay of 1PPS transit from the local to remote site, the timescales of the two sites can be synchronized by feedforward compensating for the time delay of 1PPS. Furthermore, the special bi-directional erbium-doped fiber amplifier (Bi-EDFA) is used to regenerate optical signals to achieve the long distance transmission. In order to verify our system, the frequency transfer and time synchronization via 110 km spooled fiber are achieved in the laboratory. The frequency stabilities of the remote site reach 1.8×10 −14 averaged in 1 s and 2.0×10 −17 in 10 4 respectively. The time signals at the remote site are synchronized with the local site, the accuracy of synchronization is 12 ps. Finally, we disseminate two 1PPS signals and one frequency signal (10 MHz) of hydrogen maser from the central location to two remote locations, as far away as 14 km and 110 km, via a metropolitan fiber network. The frequency stabilities of 14 km link reach 3.0×10 −14 averaged in 1 s and 1.4×10 −17 in 10 4 s, respectively; and the stabilities of 110 km link are 8.3×10 −14 and 1.7×10 −17 , respectively. The time signals at the three locations are synchronized with each other. The accuracies of synchronization are estimated to be 12.3 ps for the 14 km link and 13.1 ps for the 110 km link, respectively.
The rest of this paper is organized as follows. In Section 2, the experiment setup, the principle of time synchronization and the experimental results in the laboratory are described. In Section 3, the experimental setup via the metropolitan fiber network and the experiment results are presented. There is only one single fiber that is allowed to be used for the field experiment in each link, therefore the uncertainty of synchronization cannot be directly measured and it is discussed in the final part of this section. Finally, in Section 4, we briefly draw some conclusions from our results.
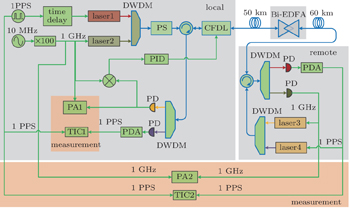
The principle of the frequency dissemination and time synchronization system via 110 km fiber link is described in Fig.
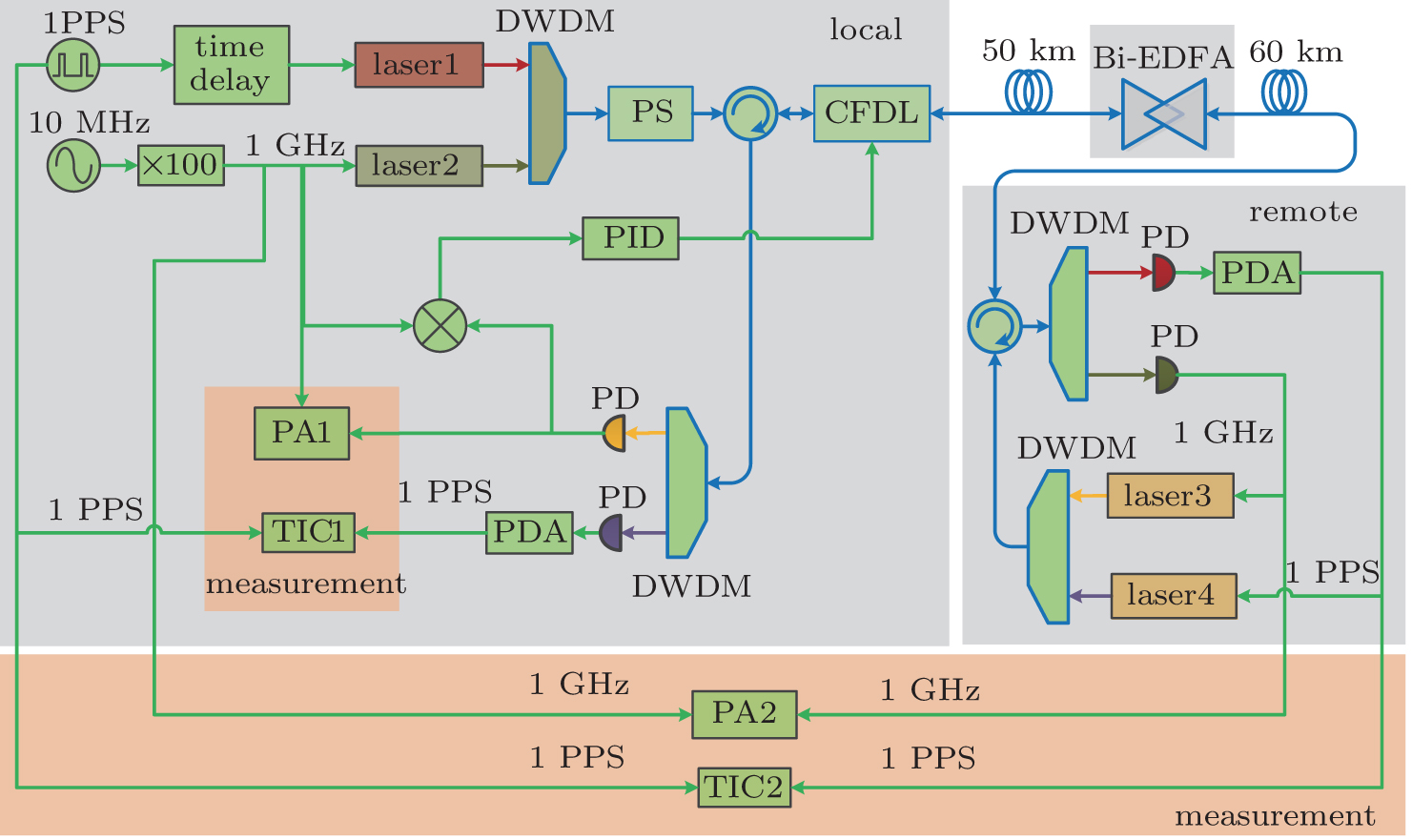 | Fig. 1. Schematic diagram of the frequency transfer and time synchronization system via 110 km fiber link. PS: polarization scrambler; CFDL: controlled fiber delay line; Bi-EDFA: bi-directional erbium-doped fiber amplifier; PA: phase analysis system; PID: proportional-integral-differential system; PDA: pulse distribution amplifier; DWDM: dense wavelength division multiplex; TIC: time interval counter. |
At the local site, the phase noise of the 1 GHz induced by the fiber transmission is detected and compensated for by a controlled fiber delay line (CFDL) which is controlled by a proportional-integral-differential (PID) system. The CFDL includes two parts, which are designed as the fast and the slow delay line, respectively. The fast delay line is a cylindrical piezoelectric ceramic transducer (PZT) where a 12mlength optical fiber is wrapped. The dynamical range is about 15 ps and the bandwidth is 1 kHz. The slow one is a temperature-controlled fiber, which is composed of an optical fiber wrapped around an aluminum wheel. The slow delay line used in 110 km fiber link is approximately 10 km long with a sensitivity of 350 ps/°C and a total dynamic range of 16 ns. A Bi-EDFA located 50 km away is used to amplify the laser light beams in both directions in order to ensure adequate optical power for entering PDs. At the local site, a phase analysis system (PA1) and time interval counter (TIC1) are used to measure the stability for the 1 GHz frequency signal and the propagation delay of 1PPS coming back from the remote site, respectively. Meanwhile, the PA2 and TIC2 are used to measure the stability for the 1 GHz frequency signal and the propagation delay of 1PPS outputting from the remote site, respectively.
In this section, we describe the procedure of the propagation delay calibration and the time synchronization. To synchronize time at the remote site, the precise time delay of the transmission needs to be measured. At the local site, one TIC is used to measure the round-trip propagation delay of the 1PPS signals, which is close to twice the single-trip delay. In this section, we first measure the instrumental delay of our system and calibrate the propagation delay. Then we discuss the difference between the forward and backward propagation delays of the fiber links. Finally, the uncertainty of the synchronization is calculated.
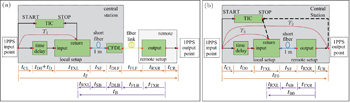
The timing model of the time synchronization system is shown in Fig.











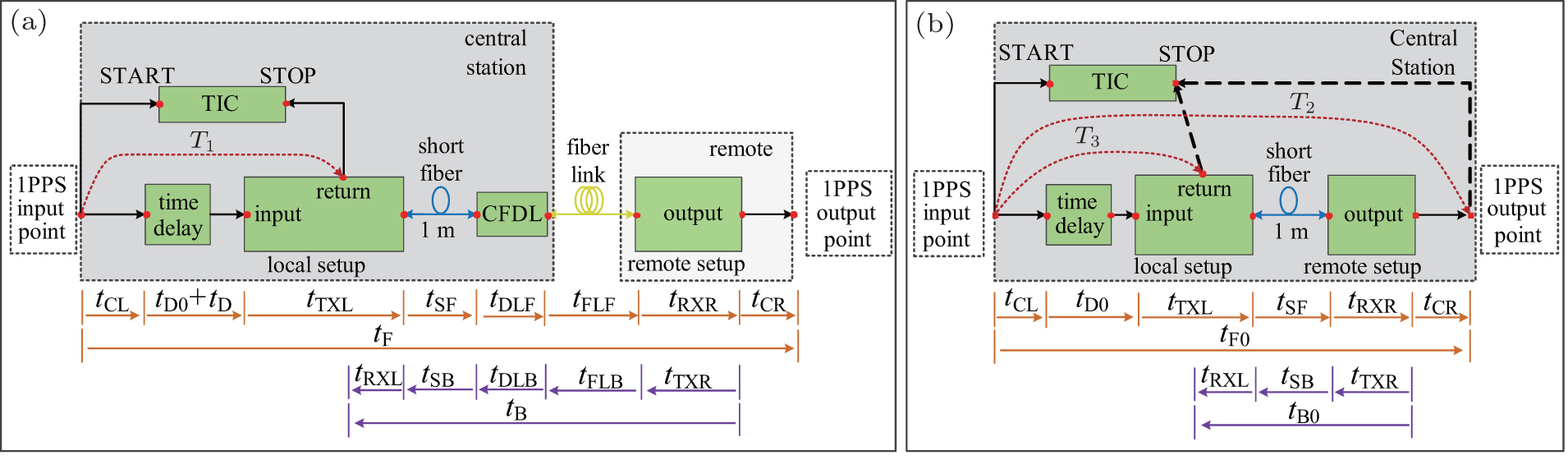 | Fig. 2. Schematic diagrams of the time synchronization system for (a) time synchronization via fiber link, and (b) the calibration of the system at the local site. |
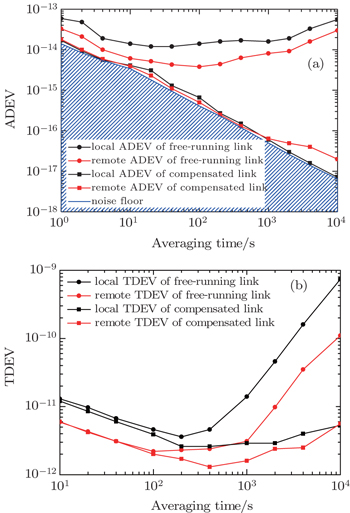
In this section, we demonstrate the measurement result of the system in the laboratory. Figure
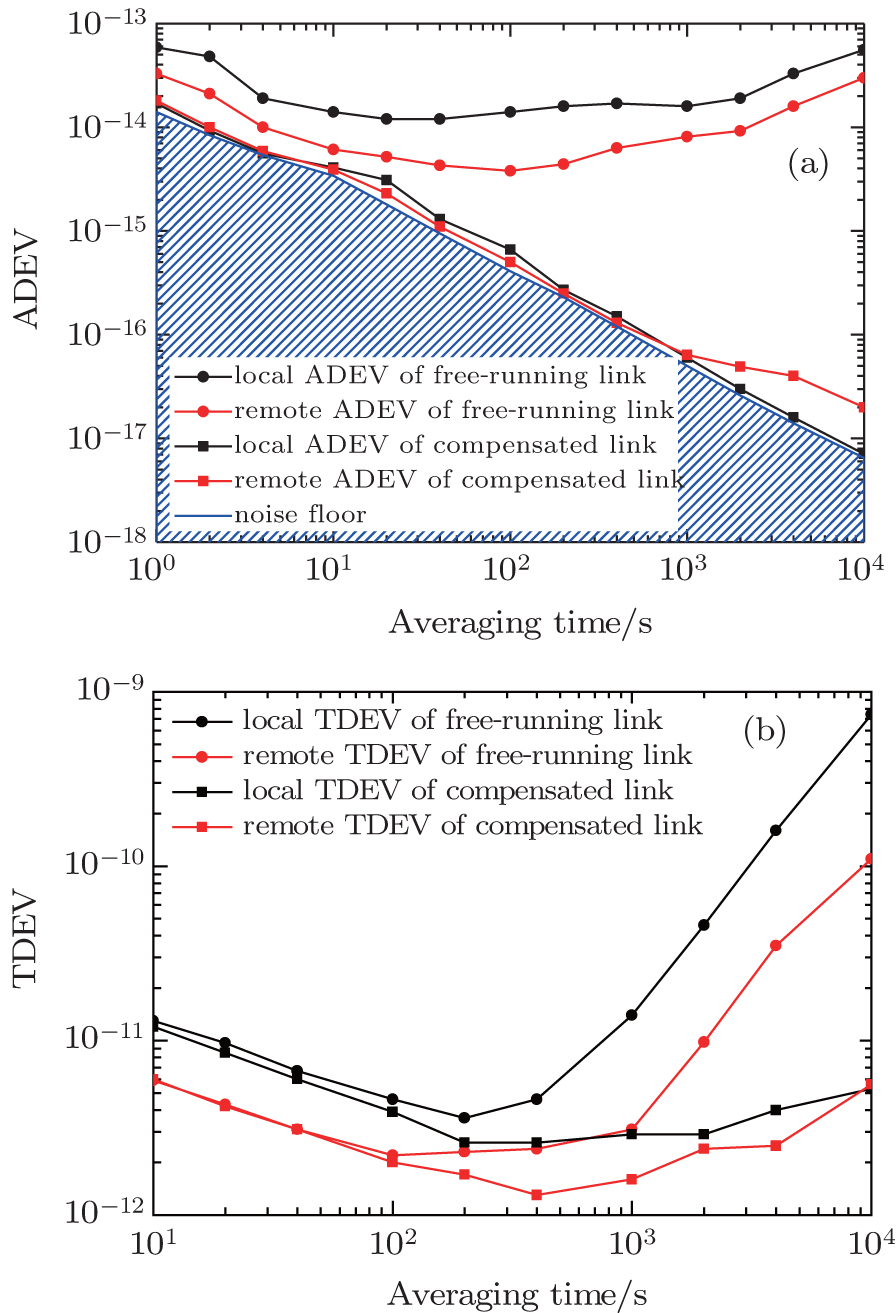 | Fig. 3. (a) ADEV and (b) TDEV of the local and the remote site with and without active stabilization. |
We synchronize the remote 1PPS with the local 1PPS according to Eqs. (
According to Eqs. (

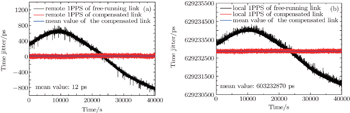
The time delay of the 1PPS between the user end and the reference generator is demonstrated in Fig.
| Table 1. Uncertainty of the time synchronization of the 110 km link. . |
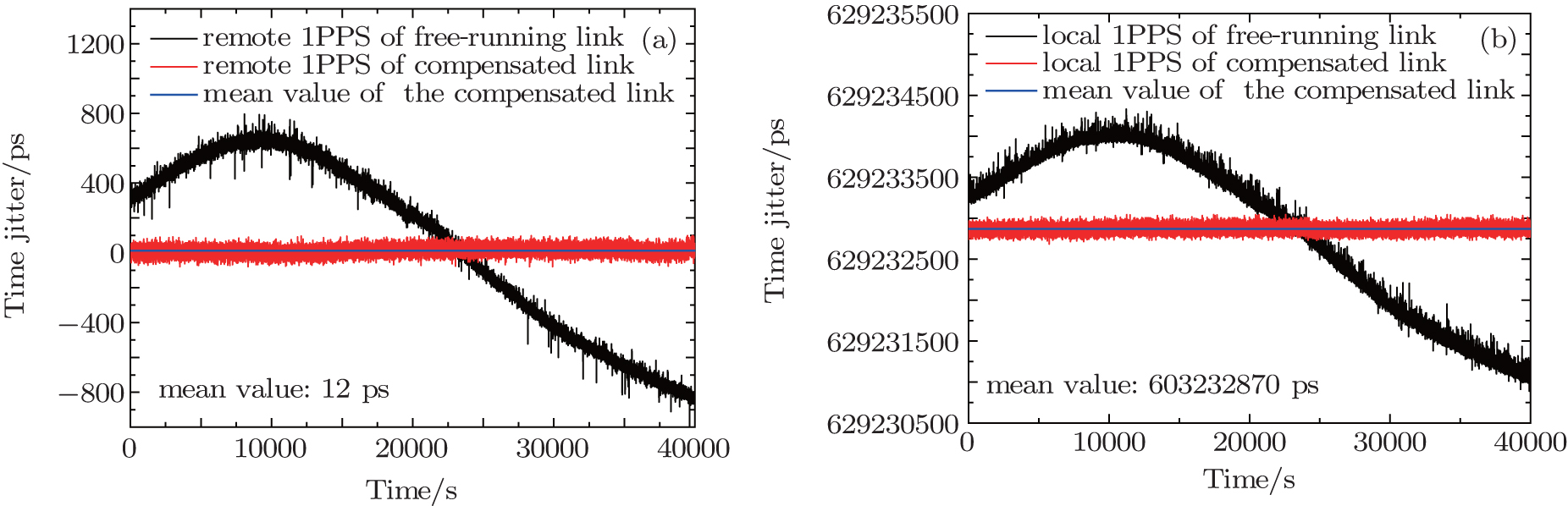 | Fig. 4. (a) Time delay between the remote output and the local reference, and (b) time delay between the local output and the local reference. |
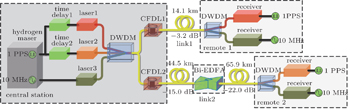
In this section, we describe our system which disseminates two 1PPS signals and one frequency signal (10 MHz) of hydrogen maser from the central site to two remote sites, as far away as 14 km and 110 km, via a metropolitan fiber network. The principle of the frequency dissemination and time synchronization system is described in Fig.
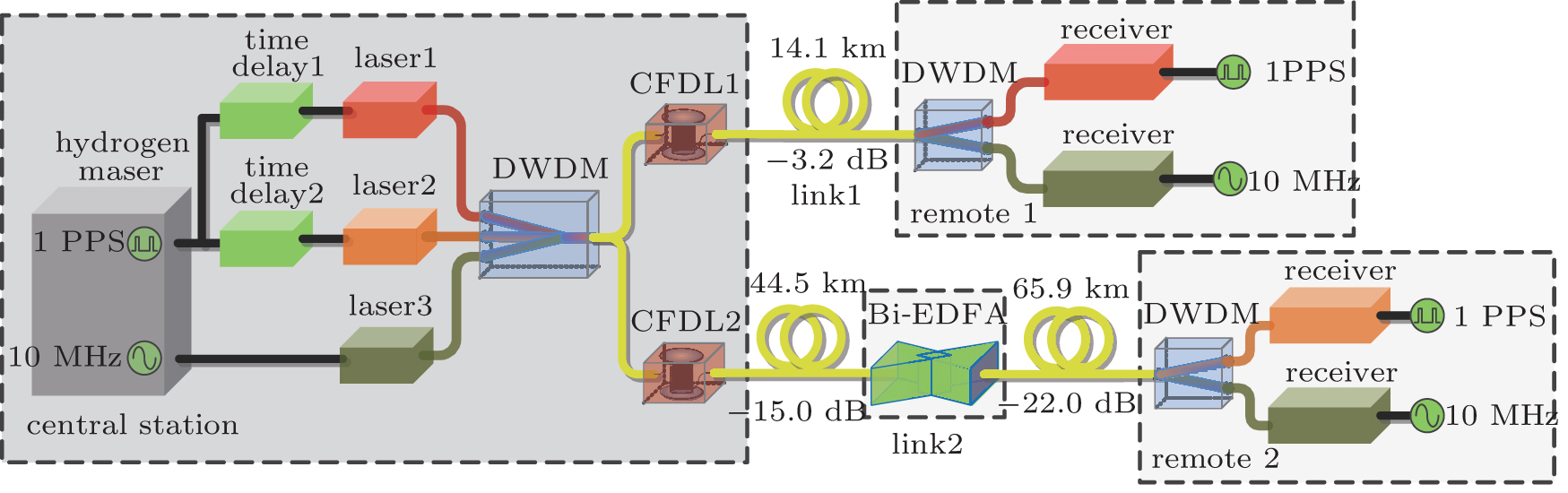 | Fig. 5. Principle of the frequency transfer and time synchronization system via urban fiber network. |
We use an optical time-domain reflectometer (JDSU MTS-6000) to test the status of the two fiber links. Link 1 is approximately 14 km long, with a total attenuation of 2.8 dB. Link 2 is approximately 110 km long and composed of nine fiber spans, with a total attenuation of 37 dB. The fiber span of the two fiber links is connected with subscription channel/ physical contact (SC/PC) connectors. We use Bi-EDFA to regenerate optical signals attenuated in the fiber to ensure that enough optical power input PDs exists. Furthermore, the optical power fed in the fiber must be below the threshold of stimulated Brillouin radiation. [ 15 ] Finally, the gain of Bi-EDFA is 24 dB.
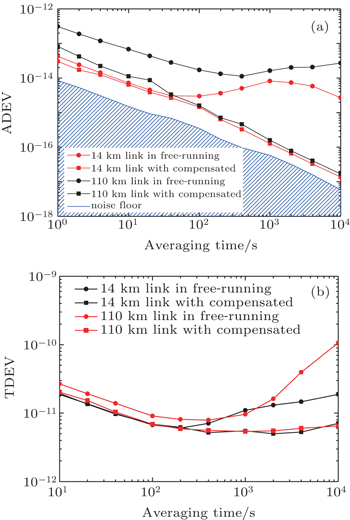
In the field experiment, only one fiber is allowed to be used in each link, and the time and frequency stability of the user end cannot be measured directly. The frequency signal (1 GHz) coming back from the remote site is down-converted to 10 MHz and compared with the 10 MHz of the H-maser. Figure
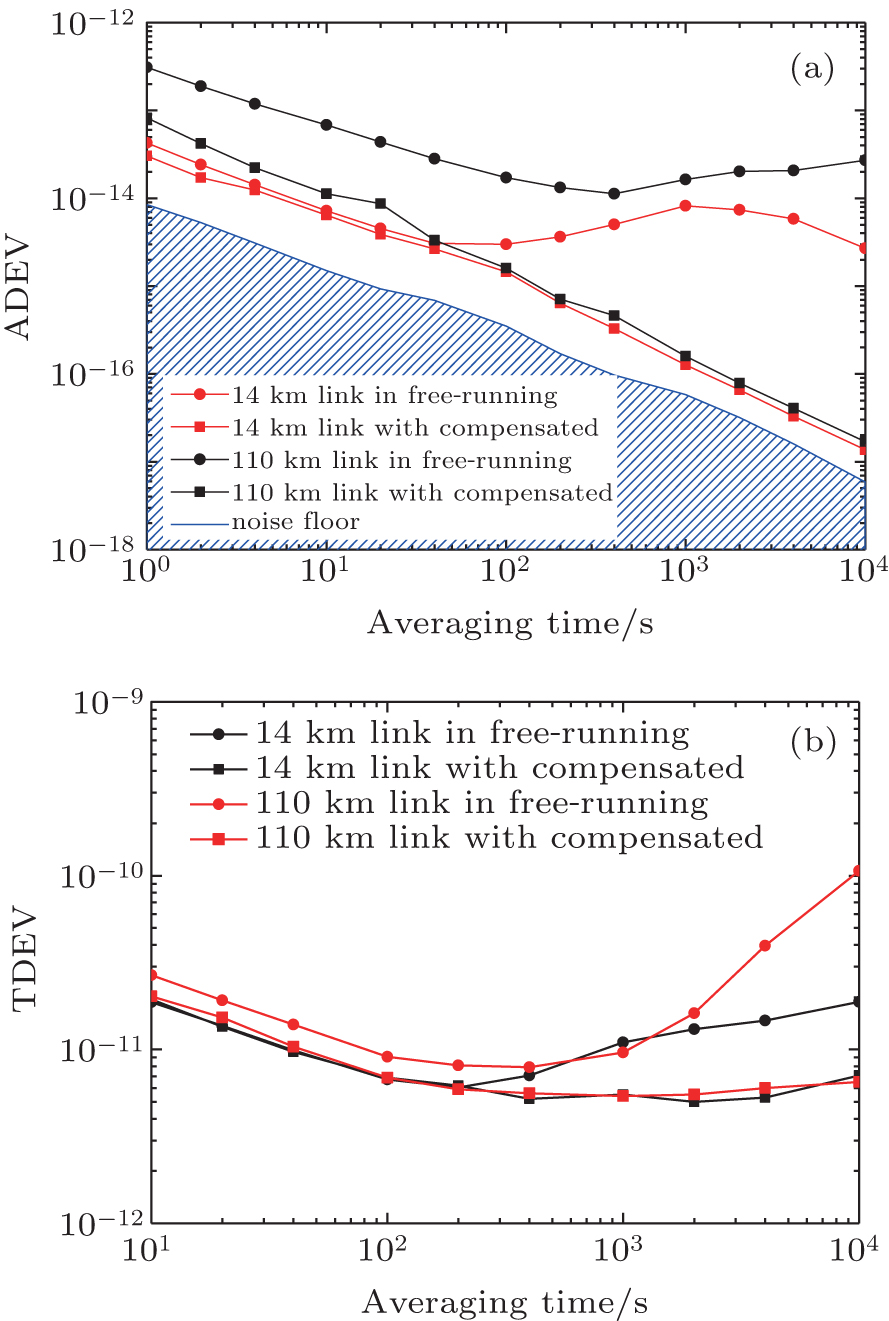 | Fig. 6. (a) ADEVs of the frequency signals coming back from remote 1 and remote 2, and (b) TDEVs of 1PPS coming back from remote 1 and remote 2. |
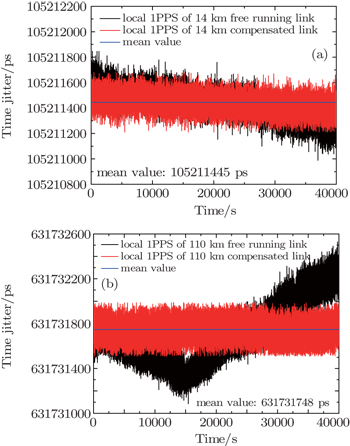
We use the same way to synchronize the remote 1PPS with the local 1PPS, which is described in Section 3. The measured time delays and the two links are shown in Table 1. The time delays described in Eqs. (
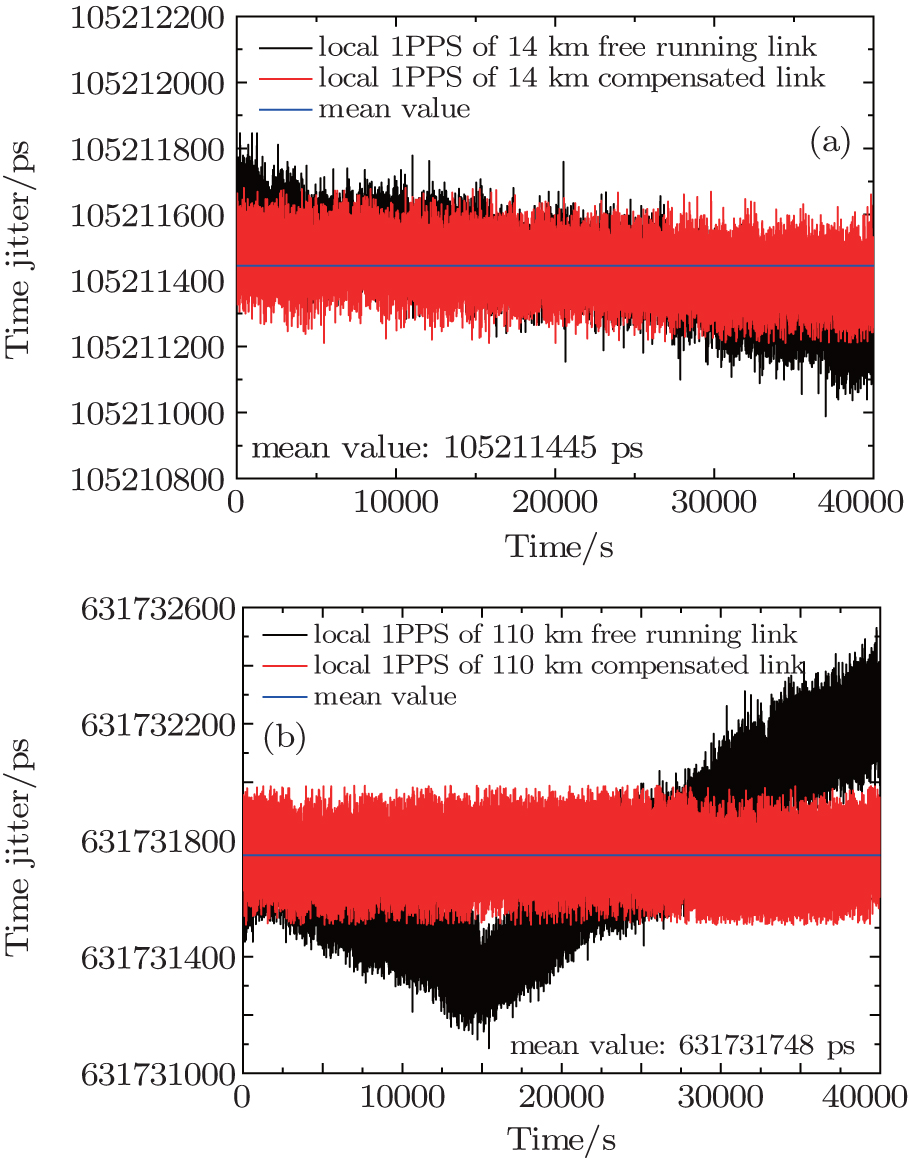 | Fig. 7. Time delays of 1PPS coming back from (a) remote 1 and (b) remote 2. |
Finally, we calculate the uncertainties of time synchronization of the two links according to Eq. (
| Table 2. Uncertainties of the time synchronization of the two links. . |
In this study, we demonstrate a system that transfers the time and frequency signals jointly via fiber link. A method of calibrating propagation delay and synchronizing the 1PPS is demonstrated. The system is experimentally examined via a 110 km spooled fiber in the laboratory. The experimental results show that the frequency stabilities of the user end with compensation are 1.8×10 −14 at 1 s and 2.0×10 −17 at 10 4 s average time, respectively, whereas the frequency stabilities of the local site are 1.7×10 −14 at 1 s and 7.1×10 −18 at 10 4 s average time, respectively. The calculated uncertainty of time synchronization is 13.1 ps, whereas the direct measurement of the uncertainty is 12 ps. Next, we use the systems to disseminate the time and frequency signals jointly from one central site to two remote sites via two single metropolitan fiber links. The synchronization of the time signals at the three stations is demonstrated. The frequency stabilities of the 14 km fiber link are achieved to be 3.0×10 −14 averaged in 1 s and 1.4×10 −17 in 10 4 s, respectively, and the fractional frequency stabilities of the 110 km fiber link are 8.3×10 −14 and 1.7×10 −17 , respectively. The synchronization uncertainty of the 14 km link is 12.3 ps, whereas the uncertainty of the 110 km link is 13.1 ps. It is believed that our system is promising for use in practical applications, such as the short baseline interferometers, VLBI, and others.
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 |