Stochastic stability of the derivative unscented Kalman filter
Hu Gao-Ge†a)  , Gao She-Sheng
, Gao She-Shenga) , Zhong Yong-Minb) , Gao Bing-Binga)
, Gao She-Sheng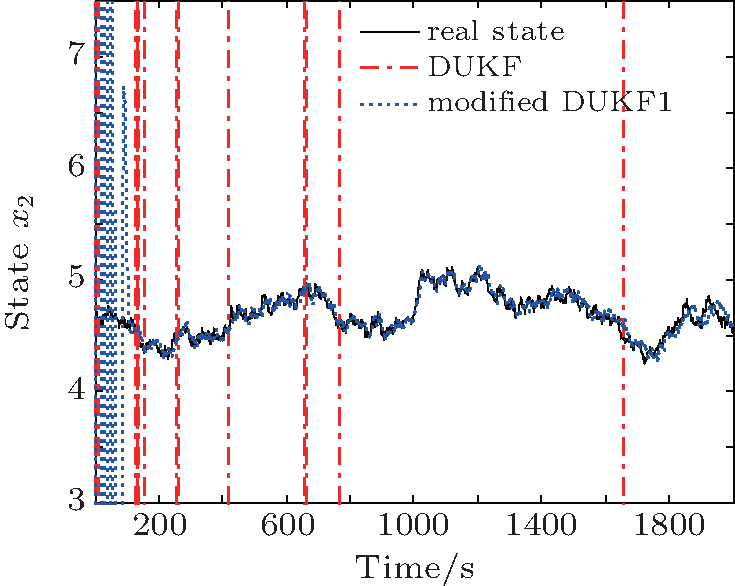
Stochastic stability of the derivative unscented Kalman filter |
|
Hu Gao-Ge†
, Gao She-Sheng |
| State x 2, k and its estimates x̂ 2, k for the bearings-only tracking system. |
| |