Stochastic stability of the derivative unscented Kalman filter
Hu Gao-Ge†a)  , Gao She-Sheng
, Gao She-Shenga) , Zhong Yong-Minb) , Gao Bing-Binga)
, Gao She-Sheng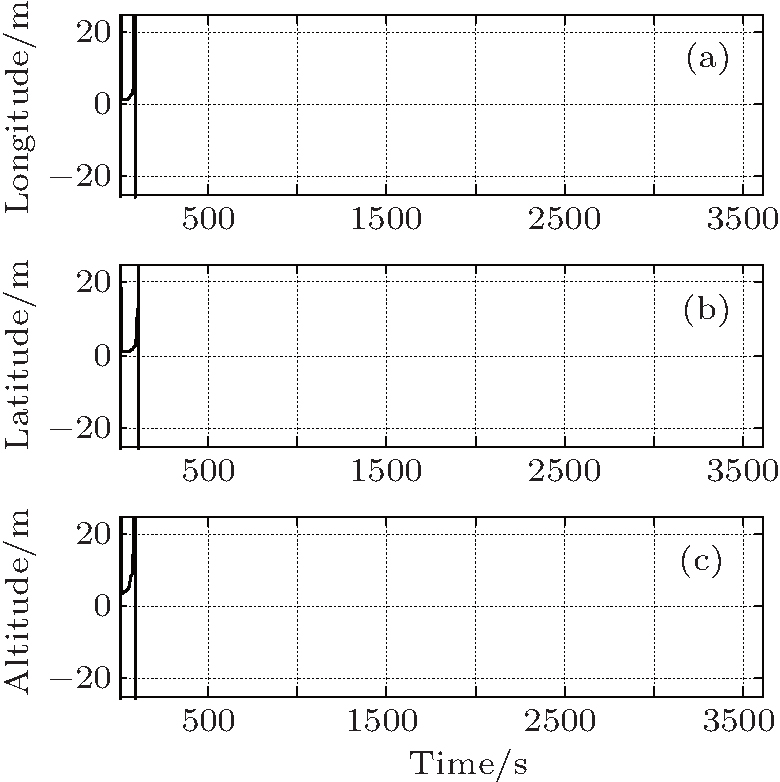
Stochastic stability of the derivative unscented Kalman filter |
|
Hu Gao-Ge†
, Gao She-Sheng |
| Position errors ((a) longitude, (b) latitude, (c) altitude) obtained by the DUKF for the tightly coupled INS/GPS integrated system. |
| |