


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Research on spatial-variant property of bistatic ISAR imaging plane of space target*
[Guo Bao-Fenga), b)†  , Wang Jun-Ling
, Wang Jun-Lingb) , Gao Mei-Guob) , Shang Chao-Xuana) , Fu Xiong-Junb) ]
, Wang Jun-Ling|
|


†Corresponding author. E-mail: guobao_feng870714@126.com
*Project supported by the National Natural Science Foundation of China (Grant No. 61401024), the Shanghai Aerospace Science and Technology Innovation Foundation, China (Grant No. SAST201240), and the Basic Research Foundation of Beijing Institute of Technology (Grant No. 20140542001).
The imaging plane of inverse synthetic aperture radar (ISAR) is the projection plane of the target. When taking an image using the range-Doppler theory, the imaging plane may have a spatial-variant property, which causes the change of scatter’s projection position and results in migration through resolution cells. In this study, we focus on the spatial-variant property of the imaging plane of a three-axis-stabilized space target. The innovative contributions are as follows. 1) The target motion model in orbit is provided based on a two-body model. 2) The instantaneous imaging plane is determined by the method of vector analysis. 3) Three Euler angles are introduced to describe the spatial-variant property of the imaging plane, and the image quality is analyzed. The simulation results confirm the analysis of the spatial-variant property. The research in this study is significant for the selection of the imaging segment, and provides the evidence for the following data processing and compensation algorithm.
Bistatic radar is a system whose transmitter and receiver are placed in different places, and the baseline length can be compared with the target distance. The operation mode makes the radar have outstanding advantages in the fight against “ Four Threats” .[1] Bistatic ISAR is the inverse synthetic aperture radar[2, 3] system based on the bistatic radar platform. It takes imagings by receiving non-backscatter echo of the target, which can obtain more target information than monostatic radar.[4] Bistatic radar has become a research hotspot in the radar field.[5– 7] Meanwhile, with the development of radar imaging technology and space technology, the imaging target is not limited to a ground target, sea target, and air target. The detection, imaging, and recognition of space targets have become a cutting-edge topic.[4, 8– 10]
In recent years, the research of bistatic ISAR has focused mainly on theories, which include the imaging principle, imaging resolution, imaging algorithm, [11– 14] etc. The simulation and verification of the theory are mostly based on the assumption that the transmitting radar station and receiving radar station are coplanar with the target motion trajectory. Under this assumption, the ISAR imaging plane is always the bistatic plane, which refers to the plane structured by the bistatic radar and the target. Under actual conditions, the transmitting radar station and receiving radar station are generally non-coplanar with the target motion trajectory, that is, the imaging plane changes during imaging. The spatial-variant of the imaging plane will change the projection position of scatters on the target, which may result in the problem of migration through resolution cells and thus affect the image quality. Currently, there are few researches on the imaging plane and spatial-variant property. In Ref. [15], the bistatic ISAR imaging plane is determined based on the method of target rotation vector analysis, but the imaging model and signal processing model are both in the two-dimensional plane, which has some limitations. There are no references to the imaging plane spatial-variant property.
The imaging plane spatial-variant property affects the image quality. The study of the spatial-variant property can provide the evidence for the selection of the imaging orbital segment and for the following data processing and compensation algorithm. Based on this, aiming at space targets, research on the spatial-variant property of bistatic ISAR is carried out. The rest of this paper is organized as follows. In Section 2, the target motion in orbit is simulated based on the two-body model. In Section 3, a method of determining the imaging plane of a space three-axis-stabilized target is proposed. The spatial-variant property of the imaging plane is analyzed in Section 4, and the influence on image quality is given. Simulation results are shown in Section 5. Finally, some conclusions are drawn from the present study in Section 6.
Space targets generally move along the orbit. Different targets have different attitude control modes. Currently, most of the satellites adopt the three-axis-stabilized attitude control mode which has higher control precision. This paper focuses on the three-axis-stabilized space target.
The motion of a space target in orbit can be described through two-line elements (TLE). According to the given TLE, we can decide the coordinates of the target in the geocentric observation coordinate system; however, the positions of the transmitter and receiver are provided in the Earth-fixed system. So, to obtain the target’ s position relative to the transmitter and the receiver, we need to transfer the coordinates of radars and target into the same coordinate system. The detailed considerations are as follows. First, the coordinates of the target are transformed from the geocentric observation coordinate system to the Earth-inertial system, and then to the Earth-fixed system where radars stay. Then the coordinates are all in the Earth-fixed system, and at any time the position vectors and velocity vectors of the target relative to radars can be accurately calculated. These vectors are the premise of the imaging plane determination and spatial-variant property analysis.
In this section, the coordinate system and coordinate transformation matrix are given first, and then the target motion in orbit is simulated based on the two-body model.
The conceptual definitions[16] of the coordinate system in space are as follows.
(i) Geocentric equatorial coordinate system XYZ. It is also known as the Earth-inertial system. Its origin is at the center of the Earth. The X axis is aligned with the vernal equinox and the equatorial plane forms the X– Y reference plane. The Z axis points to the North Pole.
(ii) Geocentric Earth-fixed coordinate system X′ Y′ Z′ . It is also known as the Earth-fixed system. Its origin is at the center of the Earth. The X′ axis points to the intersection of the prime meridian with the equatorial plane. The Y′ axis points to the intersection of the east longitude 90° with the equatorial plane. The Z′ axis points to the North Pole. The coordinate system rotates together with the Earth.
(iii) Geocentric observation coordinate system xyz. Its origin is at the center of the Earth, the x axis points to the satellite from the geocentric. The y axis is perpendicular to the x axis in the orbital plane and points to the direction of target motion. The z axis forms the right-hand rectangular coordinate system with the x axis and y axis.
The conceptual definitions of coordinate transformation are as follows.
In a right-hand rectangular coordinate system, the rotation matrix that rotates around the X axis in the positive direction can be expressed as

The rotation matrix that rotates around the Y axis in the positive direction can be expressed as

The rotation matrix that rotates around the Z axis in the positive direction can be expressed as

where, θ is the rotation angle. The definition of positive direction is the counterclockwise direction.
The Earth is assumed to be a sphere of uniform density distribution. Then the space target that moves around the Earth can be seen as a particle. The mass concentrates at the center of mass, equivalently. Thus, a simple two-body motion is formed as shown in Fig. 1. Under the two-body motion assumption, the orbit equation is

where h is the relative angular momentum of target per unit mass, i.e., the specific relative angular momentum. Its vector form is 

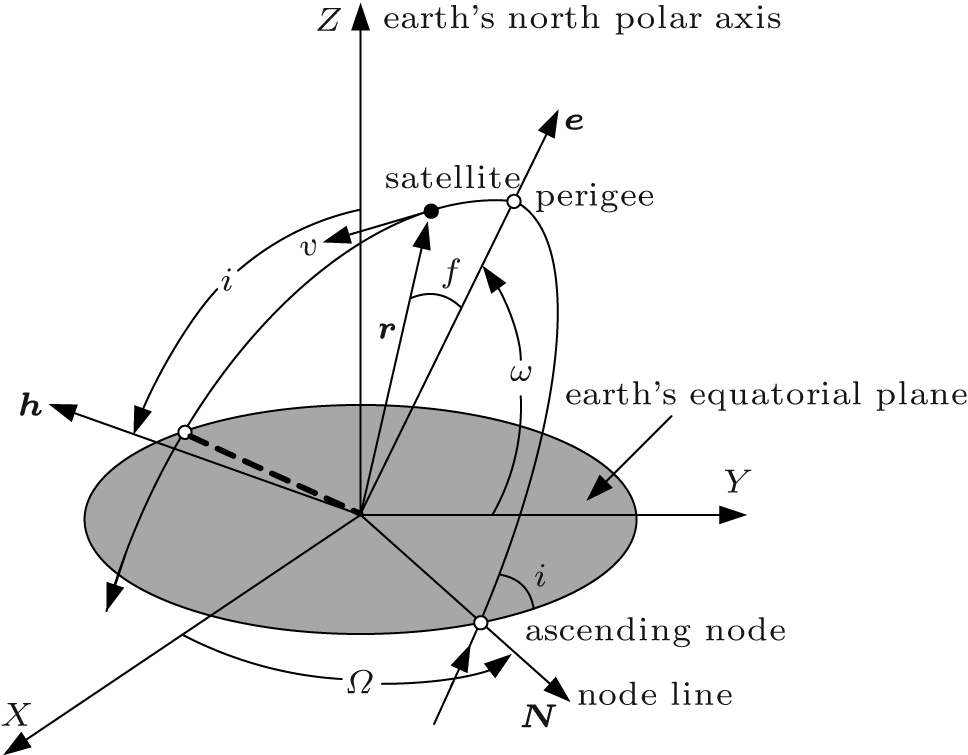 | Fig. 1. Satellite orbit model.[17] |
Orbit equation (4) contains three independent parameters: h, e, and f, and it describes the conic sections in the orbital plane. In the actual calculation, the angular momentum h and true anomaly f are frequently replaced by the semi-major axis a and mean anomaly M, respectively. Describing the orientation of an orbit in three dimensions requires three additional parameters, called the Euler angles, which are illustrated in Fig. 1.
First, we locate the intersection of the orbital plane with the equatorial (XY) plane. That line is called the node line. The point on the node line where the orbit passes above the equatorial plane from below it, is called the ascending node. The node line vector N extends outward from the origin through the ascending node. At the other end of the node line, where the orbit dives below the equatorial plane, is the descending node. The angle between the positive X axis and the node line is the first Euler angle Ω , the right ascension of the ascending node. The right ascension is a positive number lying between 0° and 360° .
The dihedral angle between the orbital plane and the equatorial plane is the inclination i, measured according to the right-hand rule, that is, counterclockwise around the node line vector from the equator to the orbit. The inclination is also the angle between the positive Z axis and the normal plane of the orbit. The inclination is a positive number between 0° and 180° .
The third Euler angle ω , the argument of perigee, is the angle between the node line vector N and the eccentricity vector e, measured in the plane of the orbit. The argument of perigee is a positive value between 0° and 360° .
The orbit of the space target can be determined by the six orbital elements (a, M, i, ω , e, Ω ), where the mean anomaly can be expressed as

with E being the eccentric anomaly, and the relationship between the eccentric anomaly and the true anomaly is

Considering the two-body motion, the coordinates of the target’ s center of mass in the geocentric observation coordinate system xyz can be expressed as

where r is the distance from target center to geocentre, and it can be obtained from Eq. (4).
Assuming that χ t0 = (a, Mt0, i, ω , e, Ω ) is the target’ s orbital element at the initial observation time, ignoring the influences of precession and nutation on the celestial pole and equinox, the coordinate system xyz can be rotated into coordinate system XYZ by a sequence of three rotations. The first step is to rotate an angle ft0 + ω around the z axis clockwise. The second step is to rotate an angle i around the x axis clockwise. Finally, we clockwise-rotate around the z axis through an angle Ω . Here, ft0 is the true anomaly of the initial observation time; it can be obtained by the initial orbital elements through Eqs. (5) and (6).
Except the mean anomaly, the remaining orbital elements are all constants. The mean anomaly can be obtained by

where tepoch is the epoch time of initial orbital elements and t0 is the epoch time of the initial observation time.
At any observation time t, to transfer the coordinate system xyz into XYZ, the only difference relative to initial observation time t0 is that the rotation angle around the z axis is ft + ω rather than ft0 + ω , where ft is the true anomaly of observation time t.
Therefore, the transformation matrix xyz into XYZ at the observation time t can be written as

where Rx (• ) and Rz (• ) are the rotation matrices around the x axis and z axis, respectively.
Without considering the polar motion, the difference between the geocentric equatorial coordinate system XYZ and the geocentric Earth-fixed coordinate system X′ Y′ Z′ is the Earth’ s rotation angle (i.e., Greenwich hour angle SG). Then the transformation matrix XYZ into X′ Y′ Z′ can be expressed as

where SGt0 is the Greenwich hour angle of the initial observation time t0, nE is the Earth’ s rotation angular velocity, and its period is 86164.098903691 s.
The Greenwich hour angle can be calculated from the following equation:

where tJ can be expressed as

with JD(t) being the Julian day at the observation time t, and JD(J2000.0) the Julian day corresponding to epoch J2000.0.
The coordinates of the target in coordinate system X′ Y′ Z′ can be obtained by Eq. (7) through Eq. (12) together

Assuming that the longitude, latitude, and elevation of radar are θ Long, θ Lat, and hR, respectively, the radar coordinates in coordinate system X′ Y′ Z′ can be expressed as

where RE is the radius of the Earth, and generally its value is 6378.15 km.
Using Eqs. (13) and (14), we can obtain the radar’ s observation vector relative to the target as

For the three-axis-stabilized target, the rotation angular velocity caused by attitude stabilization of the target is equal to the true anomaly, that is, the scatter vector relative to the center of the target is constant in the observation coordinate system. Assuming that the coordinates of some scatter on target are [xi, yi, zi]T in the geocentric observation coordinate system, the coordinates in the geocentric Earth-fixed coordinate system X′ Y′ Z′ can be written as

where Cα and Sα represent the sine and cosine function of angle α respectively. In the above formula, α = − ft − ω , β = − i, and γ = − (− SGt0 − nEt + Ω ).
The scatter’ s position vector relative to radar is

From Eq. (17), we can obtain the distance from radar to the scatter as follows:

We take the first and second derivatives of Eq. (18) to obtain the radial velocity and acceleration:


where ẋ and ẍ respectively represent the first and second derivatives of x, and they can be obtained from Eq. (17).
Through the orbit simulation based on the two-body model, we can obtain the position of the target from Eq. (16) and also obtain the radar position from Eq. (14) in the geocentric Earth-fixed coordinate system X′ Y′ Z′ at any time. Bistatic ISAR consists of two radars placed at different places, and the scatter’ s position vector and other parameters (radial velocity, acceleration, and so on) relative to either radar can be obtained.
The imaging plane is the projection plane of ISAR. The change of imaging plane during imaging forms the spatial-variant property. This section focuses on the determination method the imaging plane. Since the space turntable imaging model is for a special case of ISAR, the imaging plane determination method is studied aiming first at the turntable model and then at the space three-axis-stabilized target.
Figure 2 illustrates the topology of bistatic ISAR imaging plane, where oxyz is the right-hand coordinate system with its origin o located at the target’ s center, and the x axis points to the transmitter. The y axis lying in the bistatic plane is perpendicular to the x axis. The z axis forms a right-hand rectangular coordinate system with the x axis and y axis. 

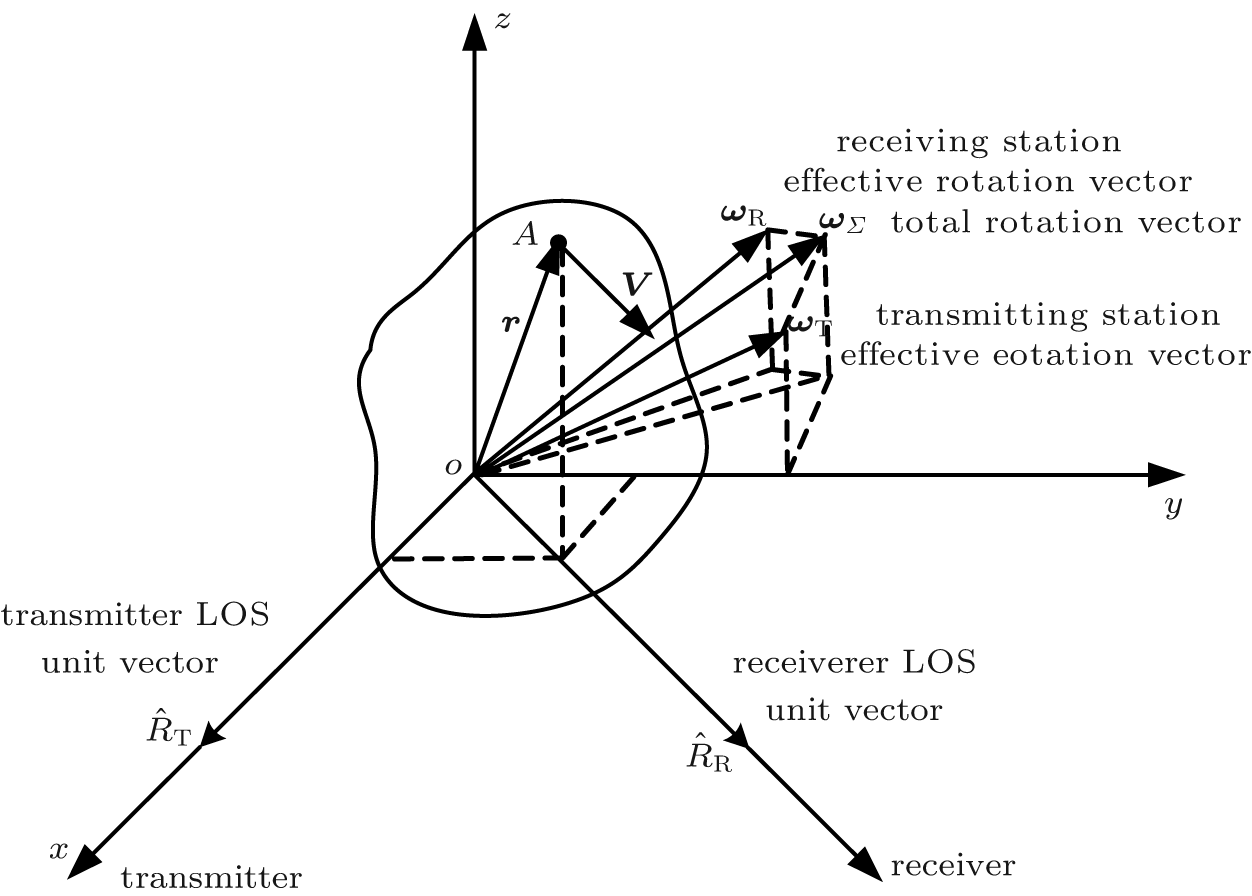 | Fig. 2. General topology of bistatic ISAR imaging plane. |
For some scatter A on the target, its position vector is r, then the velocity V of scatter A caused by target rotation can be expressed as

Note that the bistatic Doppler frequency is the summation of the Doppler frequency created by the velocity vector respectively on the transmitter LOS and receiver LOS. Then the instantaneous rotation bistatic Doppler frequency of scatter A could be given as

Substituting Eq. (21) into Eq. (22) leads to

Let ω T represent the projection vector of ω Σ on the plane perpendicular to 


Substituting Eq. (24) into Eq. (23) yields

We can see that the bistatic Doppler frequency is the projection of position vector r on vector 


Thus, the range direction of bistatic ISAR is determined by

and the cross range direction of bistatic ISAR is determined by

Vectors Θ and 𝚵 determine the imaging plane, and the signs of vectors Θ and 𝚵 have no effect on the imaging plane determination. We can also see that the vector Θ is always perpendicular to 𝚵 in the case of the turntable model.
The motion forms of the space three-axis-stabilized target include the translational motion and the rotation around the target center of mass. The translational motion of the target will cause the change of visual angle, which can also provide the bistatic Doppler frequency. Thus, the cross range direction is determined by both the translational motion and the rotation.
Assume that the translational motion velocity is υ . Note that υ here is different from the rotation velocity V. We know that the radial velocity relative to transmitter and receiver cannot cause the visual angle to change. Let vT represent the projection vector of v on the plane perpendicular to 


Then the total rotation vector consists of two parts, one is caused by the translational motion and the other by attitude-stabilized rotation. Let ω vT and ω vR be the rotation vectors caused by translational motion relative to transmitter and receiver respectively, then they will be expressed respectively as
where RT and RR are the distances from the center of target to transmitter and to receiver, respectively. Assuming that the attitude-stabilized rotation vector is ω s, and ω sT is the projection of ω s on the plane perpendicular to 


The total rotation vectors ω ∑ T and ω ∑ R of the target relative to transmitter and receiver can be written as

Substituting Eqs. (29)– (31) into Eq. (27), we obtain the cross range direction of bistatic ISAR of three-axis-stabilized target.

According to vector product formula a × b × c = (a · c) b − (b · c) a, we can obtain that


Substituting Eqs. (33) and (34) into Eq. (32) yields

Let

and

then 𝚵 1 which is similar to Eq. (27) will be a cross range vector caused by attitude-stabilized rotation, and 𝚵 2 is the cross range vector caused by the translational motion of target.
The bistatic ISAR range direction of the three-axis-stabilized target is also the direction of bistatic angle bisector, and it can be written as

Note that the vector Θ is not always perpendicular to vector 𝚵 .
The space target can be regarded as the cooperative target, and we can obtain its position vector and velocity vector at any time through the six orbital elements. Then the cross range direction 𝚵 and range direction Θ can be obtained according to Eqs. (35) and (36). Θ and 𝚵 together determine the imaging plane.
ISAR is a powerful signal processing technique for imaging moving targets in range-Doppler domains. The required range resolution is achieved by using the finite frequency bandwidth of the transmitted signal, and the cross range resolution by different look angles and Doppler histories.
The spatial-variant property of the imaging plane causes the change of scatters’ projection position onto the imaging plane. When the spatial-variant property is serious, the phenomenon of migration through resolution cells occurs, which results in image blurring.
The purpose of spatial-variant property analysis is to find the scatters’ range histories projected onto the range axis, which provides the evidence of image quality analysis. If the position change projected onto the range axis does not exceed a range resolution cell, it will not cause the migration through range cells, and we can determine whether the migration through Doppler cells exists by the scatters’ Doppler histories.
First, in this section the spatial-variant property of the space three-axis-stabilized target is analyzed. Then the range histories and Doppler histories of scatters are obtained in the case of spatial-variant. Finally, the image quality is analyzed.
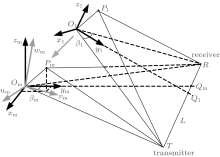
When the imaging plane is spatial-variant, the geometry of bistatic ISAR is shown in Fig. 3, where T is the transmitter, R is the receiver, and L denotes the length of the baseline of bistatic ISAR. At the imaging initial time t1, a right-hand coordinate system x1y1z1 is established. Its origin O1 is at the center of the target, the y1 axis is the range axis, i.e., the bistatic angle bisector direction. The x1 axis is perpendicular to the y1 axis in the bistatic plane, and the z1 axis is perpendicular to the x1O1y1 plane. P is a scatter on the target, at the time t1, we denote it as P1, and its coordinates are (xP, yP, zp) in the x1y1z1 system. At the imaging time tm, Om is the center of the target and we write the scatter P as Pm. Based on this, a right-hand coordinate system xmymzm is established with Om representing its origin, the ym axis pointing to the bistatic angle bisector direction, the xm axis being perpendicular to the ym axis in the bistatic plane, and the zm axis perpendicular to the xmOmym plane. In the coordinate system xmymzm, the coordinates of scatter Pm are (xPm, yPm, zpm). At the times t1 and tm, the bistatic angles are β 1 and β m, and the intersections of the bistatic angle bisector with the baseline are Q1 and Qm, respectively.
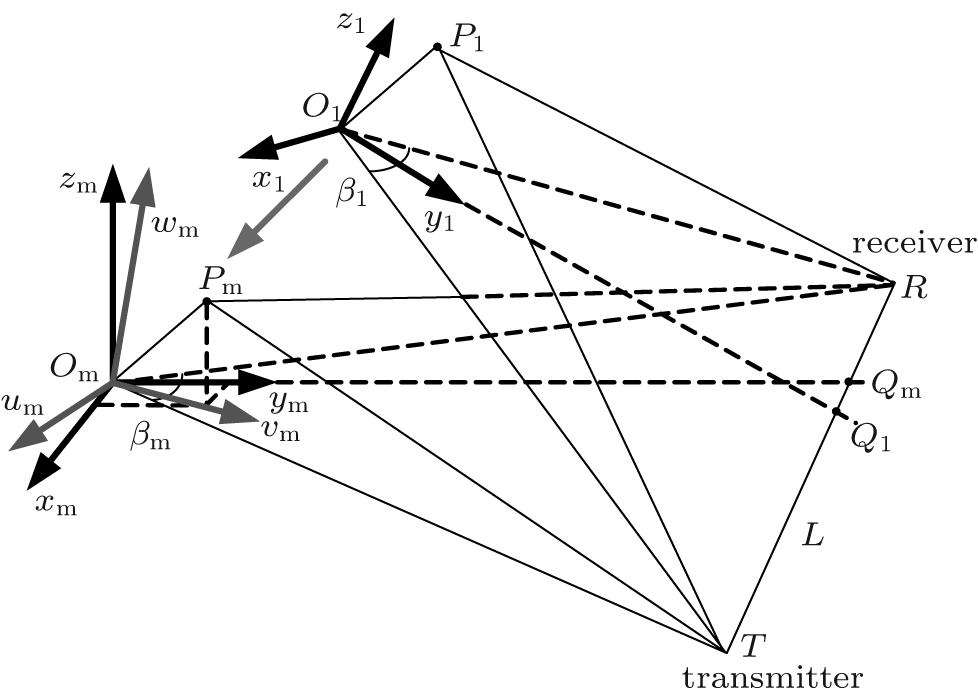 | Fig. 3. Geometry of bistatic ISAR. |
The space three-axis-stabilized target also rotates while it has the translational motion component. The rotation causes the change of the scatter projection position as well as the translational motion. The rotation axis goes through the center of the target and it is parallel to the normal line of the orbital plane. During imaging, the rotation axis and rotation angular velocity can be regarded as constants. The process that the target rotates around the rotation axis is equivalent to that the target stays stationary (i.e., translational motion only) and the radars rotate around the rotation axis inversely along with the coordinate system. After the rotation of radars and the coordinate system, a new coordinate system is obtained. The scatters’ coordinate values in the new coordinate system reflect not only the different look angles but also the target’ s attitude-stabilized rotation. From the coordinate values we can obtain the range histories of any scatter, and the Doppler frequency can be easily found by taking the slow time derivative of range histories.
Assuming that the attitude-stabilized rotation unit vector of the target is A(Ax, Ay, Az). From t1 to tm, the rotation angle is − η m. Note that the minus sign represents the clockwise rotation. Then counterclockwise rotating the space coordinate system xmymzm around rotation axis A through the angle η m, we can obtain a new coordinate system umvmwm, and it implies the attitude-stabilized rotation of the target. Let 



The transformation matrix Rs(η m) is derived in Appendix A.
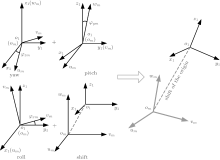
Since the coordinates of scatter P1 are (xp, yp, zp) in the x1y1z1 system, to obtain the coordinates of Pm in umvmwm, it is necessary to deduce the transformation relationship between x1y1z1 and umvmwm. As is well known, any two rectangular coordinate systems in space can be mutually transformed by a sequence of three rotations and a shift of the origin, which is illustrated in Fig. 4. Three rotations are the Euler angles, i.e., yaw angle, pitch angle, and roll angle. We define that the yaw angle is the angle rotating around the z axis, the pitch angle is the angle rotating around the y axis, and the roll angle is the angle rotating around the x axis. The shift of the origin has no influence on the directions of coordinate axes. Without considering the origin position, to transfer the x1y1z1 system into the umvmwm system, we need three rotations.
The first step is to rotate the x1o1y1 through a yaw angle φ zm around the z1 axis. Then we obtain a new coordinate system 

The second step is to rotate the 




The third step, i.e., the last step is to rotate the 




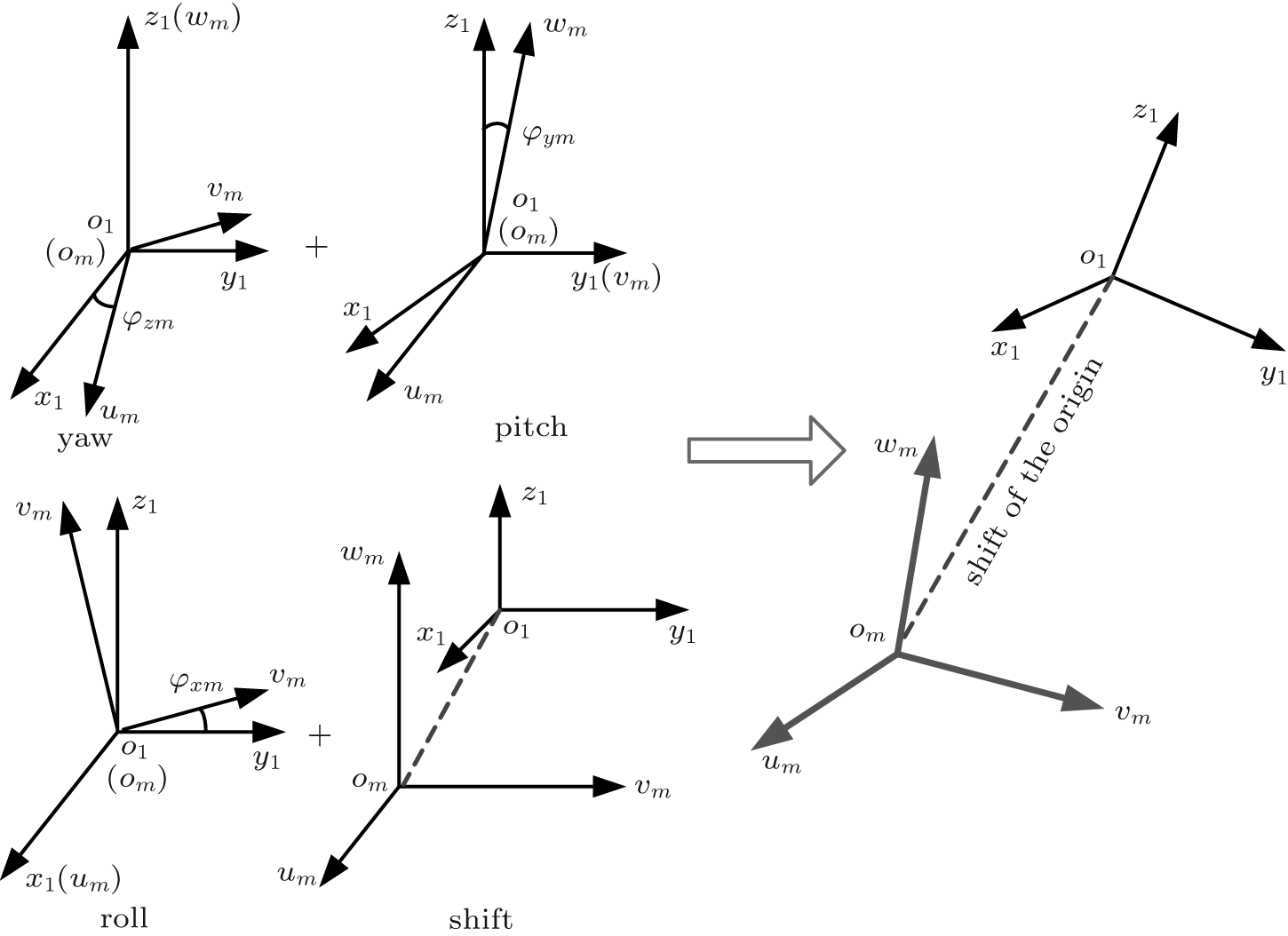 | Fig. 4. Schematic diagram of coordinate transformation in space. |
There always exists a set of Euler angles φ zm, φ ym, and φ xm so that the directions of 

Then the axial directions of umvmwm and x1y1z1 satisfy the following equation:

The transformation matrix Rxyz_m can be expressed as

Since the axial directions of x1y1z1 and xmymzm can be determined by Eqs. (35) and (36), and the axial directions of umvmwm can be obtained by Eq. (37) further, we can obtain the transformation matrix Rxyz_m by Eq. (40). By combining Eqs. (38) and (40), we obtain the solutions of the three Euler angles as follows:



In theory, the limits of Euler angles are [− π , π ]. The yaw angle ξ zm is the rotation angle around the normal line to the imaging plane, and essentially it is the integration angle used to obtain the required cross range resolution. The pitch angle ξ ym and roll angle ξ xm are the rotation angles around the range axis and cross range axis respectively, and they are the spatial-variant angles that reflect the spatial-variant properties of the imaging plane. As is well known, when the integration rotation angle is big, the migration through the resolution cell may occur in the bistatic ISAR, which will affect the imaging quality. So in actual imaging, to ensure the imaging quality, the integration rotation angle is generally not more than 6° ∼ 7° . Thus, in the general case, the Euler angles are small, and the limit [− π /18, π /18] is sufficient to meet the need. Note that the limit has no effect on the subsequent data processing.
The coordinates of scatter P1 are (xp, yp, zp) in the x1y1z1 system, and the coordinates of scatter Pm are (upm, vpm, wpm) in the umvmwm system, which satisfy the following equation.:

Combining Eqs. (39) and (44), we can obtain the coordinates of scatter Pm as

Since Rxyz_m is a unit orthogonal matrix, the inverse of Rxyz_m is its transpose matrix, i.e. 

By using Eq. (46), we can obtain the position histories of scatter P projected onto the imaging plane during imaging.
Assuming that the two radars are ideally synchronous, and the transmitter emits a chirp signal with a period of TPRT, we have

where rect (u) is the rectangular window function defined as (u) = 1 if |u| ≤ 0.5 and (u) = 0 otherwise; 

At the time tm, let Δ Rpm be the difference between the sum of the distance from scatter Pm to two radars (transmitter and receiver) and the sum of the distance from the center of the target to two radars. We can obtain the range profile of scatter Pm through pulse compression. Then the range profile after ideal motion compensation can be written as[8, 18]
where Ap is the signal amplitude, and c is the speed of light in free space. From Eq. (48), the peak position of the range profile occurs at the time 

obtained from the phase.
In bistatic ISAR, the length of Δ Rpm is 2 cos(β m/2) times the length of the projection of vector OmPm onto the bistatic angle bisector, [19] that is, the value of Rpm is 2 cos (β m/2) times the coordinate value of scatter Pm onto the range axis in the umvmwm system. Taking the attitude-stabilized rotation into account, the range axis is the vm axis, and then the range projection value vpm of scatter Pm onto the range axis can be obtained by Eqs. (38) and (46) as follows:

We can write Rpm as

Using Eq. (50), the instantaneous frequency of scatter Pm can be found by taking the slow derivative of the phase in Eq. (48) as follows:

where ξ ′ = dξ /dtm represents the derivative of the slow time. Equations (50) and (51) describe the range histories and Doppler histories during imaging, respectively. When the values of yaw angle ξ zm, pitch angle ξ ym, roll angle ξ xm, and bistatic angle β m change, the peak positions of range and Doppler frequency also change; it may cause the migration through resolution cells, which may result in image blurring. Thus equations (50) and (51) are the evidences of image quality analysis. For different imaging segments, the Euler angles and bistatic angle have different variation characteristics, and the degrees of migration through resolution cells differ from each other. Then we obtain different quality ISAR images further. So it is necessary to analyze the influence of each angle on image quality, which provides a theoretical guidance for imaging experiment and the selection of imaging segments.
The above two equations are quite complex, especially Eq. (51). Considering that the yaw angle, pitch angle, and roll angle are all very small, the cosine term can be replaced by 1, and their high order sine terms (order greater than or equal to 3) can be ignored. Then equations (50) and (51) can be simplified into


Both equations can be written as the superposition of non-spatial-variant terms and spatial-variant additional terms, i.e.,


where


where Δ Rpm_z and fd_z are the range information and Doppler information of scatter when the imaging plane has no spatial-variant property, and Rpm_xy and fd_xy are the range terms and Doppler terms caused by the spatial-variant imaging plane. When analyzing the effect of the spatial-variant property on imaging, we only need to analyze Eqs. (57) and (59).
The spatial-variant property of bistatic ISAR is concerned with the target motion trajectory and the positions of transmitter and receiver. When the spatial-variant property is serious, the phenomenon of migration through resolution cells occurs, which may result in image blurring. The analysis of the spatial-variant property provides evidence for imaging experiment and the selection of imaging segments.
To verify the analysis in this paper, the simulation experiments are performed in this section.
We select the Tiangong-1 satellite as the simulation target, and its six orbital elements are provided by the Space Surveillance Network (SSN) of America in the form of a two-line element (TLE) listed as follows:
1 37820U 11053A 14104.86088755 0.00057267 00000-0 50311-3 0 9357
2 37820 042.7734 335.3498 0012276 284.0961 185.9363 15.67862963146089
The epoch time of initial orbital elements is on 14 April 2014 at 20:39:41. The six orbital elements can be derived from the TLE. Then we can simulate the motion of a satellite in orbit according to the model built in Section 2. Placing the transmitting station in city A, and placing the receiving station in city B, from 05:39:30 to 05:47:50, i.e., in a total time of 500 s the satellite was visible by using the transmitter and receiver. The simulation scenario is shown in Fig. 5, where the solid curve represents the satellite orbit, the diamond denotes a transmitter and the circle refers to a receiver, and the star is the geocentric position. The coordinate system is the Earth-fixed system.
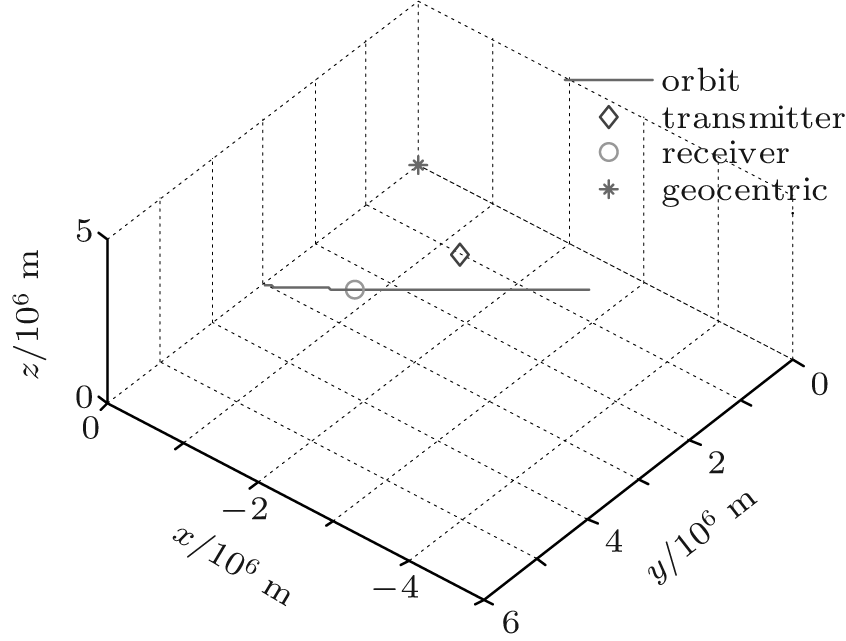 | Fig. 5. Simulation scenario. |
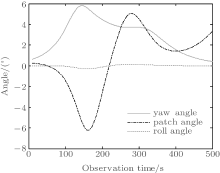
To describe the spatial-variant property of the imaging plane intuitively, we simulate the yaw angle, pitch angle, and roll angle curves in steps of 10 s, the results of which are shown in Fig. 6. In the figure, the yaw angle (i.e., integration angle) and pitch angle change greatly but the roll angle has a small variation.
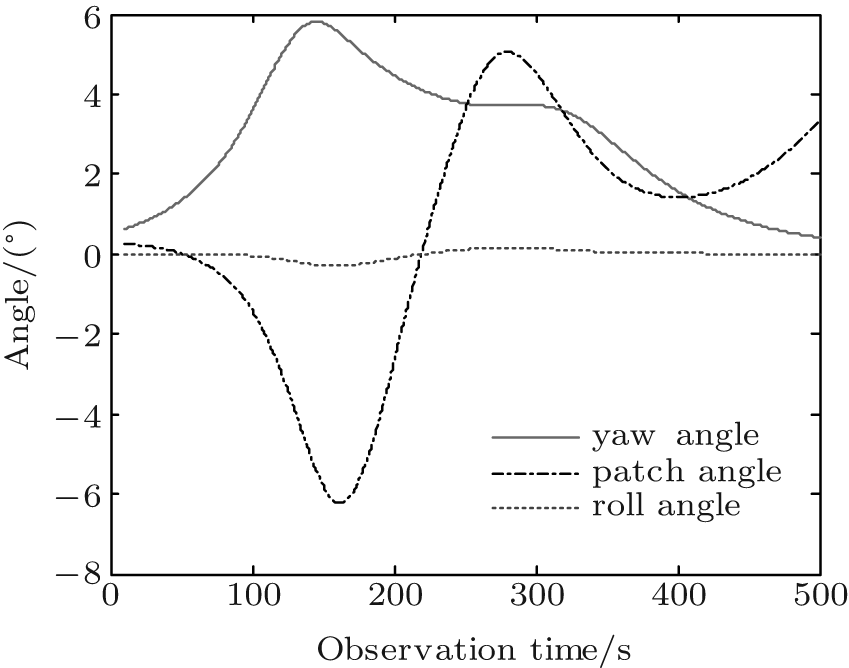 | Fig. 6. Spatial-variant angle curves every 10 s. |
The purpose of spatial-variant analysis is to analyze the effect of a changing imaging plane on image quality. The range terms and Doppler terms caused by the spatial-variant imaging plane are shown in Eqs. (57) and (59), where range terms Δ Rpm_xy contain two factors and Doppler terms fd_xy contain five factors. These seven factors can be written as follows:
Range factor 1, 
Range factor 2, 
Doppler factor 1, 
Doppler factor 2, 
Doppler factor 3, 
Doppler factor 4, 
Doppler factor 5, 
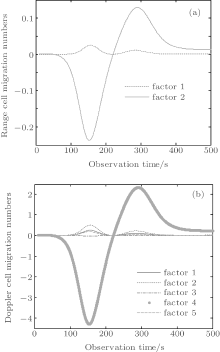
These factors reflect the degree of migration through range and Doppler cells. Let the size of target be 10 m, i.e., xp = yp = zp = 10 m, then we will simulate the possible numbers of migration through the range and Doppler cell by the above seven factors also in steps of 10 s. The results are shown in Fig. 7. Figure 7(a) shows the variations of the number of range cell migrations with observation time, and figure 7(b) displays variations of the number of Doppler cell migrations with observation time. We can see that the migration through range cell number is less than 0.25 for a target of this size. However, the Doppler cell number that the migration goes through is greater than 4 at some orbital segments. In addition, it is caused mainly by Doppler factor 4. Doppler factor 4 is a function of the roll angle and height coordinate of scatter. If the scatter has the larger height coordinate, more serious Doppler cell migrations will take place. Therefore, for some imaging segments, the spatial-variant property will deteriorate the image quality. Since the existing correction algorithm[20] cannot correct the Doppler migration caused by the spatial-variant imaging plane, to obtain a high-quality ISAR image, we need to avoid the orbital segments which have a serious spatial-variant property in actual imaging.
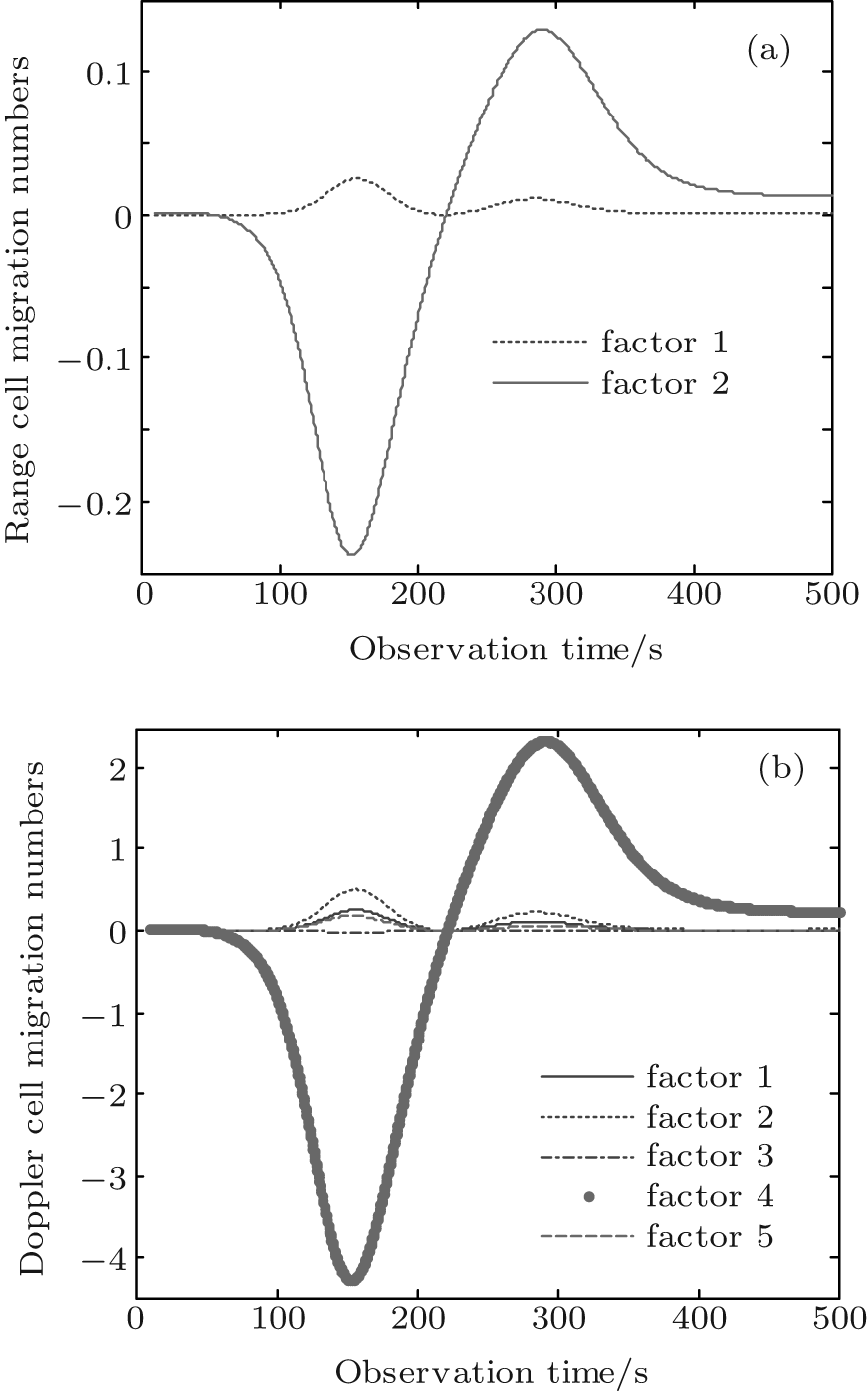 | Fig. 7. The numbers of migrations through range and Doppler cell caused by spatial-variant imaging plane versus observation time: (a) range cell migration numbers; (b) Doppler cell migration numbers. |
From the above simulation, we can see that the spatial-variant property has little effect on migration through range cell, but has great Doppler migration. To verify the above analysis, the imaging simulations are carried out.
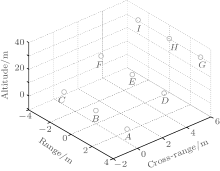
Two different imaging segments are selected for the bistatic ISAR imaging simulation. The observation time for imaging segment 1 is from 145 s to 155 s. The spatial-variant property is serious and it will cause the great image change of different height scatters in theory. The observation time for imaging segment 2 is from 215 s to 225 s. The imaging plane is quite stable with respect to segment 1, and the imaging results of discrete scatters at different heights should be basically the same. The simulation scatter model is shown in Fig. 8, and the coordinate values of 9 scatters are listed in Table 1. The values of range and cross range are as small as 3 m, but the height difference is large, the height coordinate values of scatters A ∼ C are 0 m, scatters D ∼ F are 15 m, and scatters G ∼ I are 30 m. The simulation radar parameters and imaging parameters of two imaging segments are listed in Table 2.
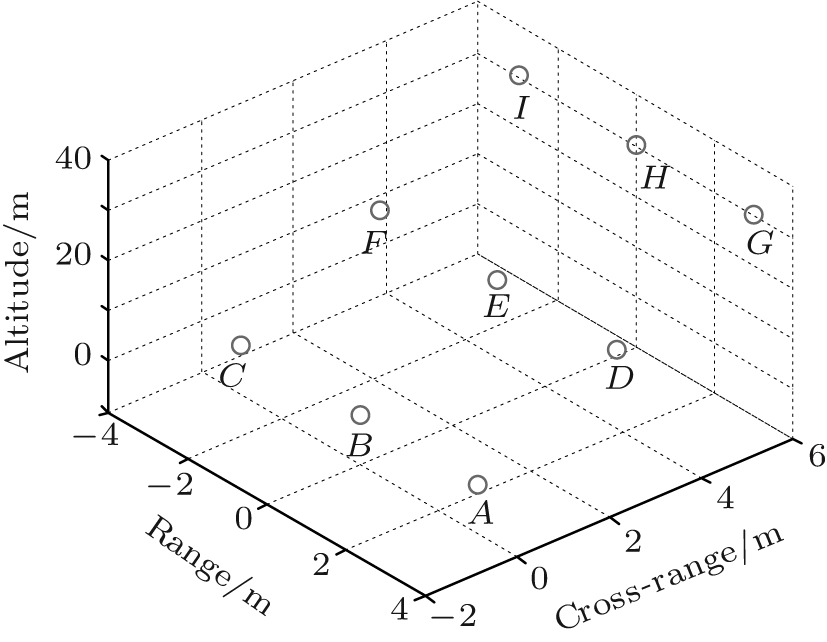 | Fig. 8. Scatter model. |
| Table 1. Coordinate values of scatters. |
| Table 2. Simulation radar parameters and imaging parameters of bistatic ISAR. |
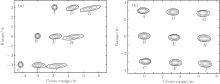
The imaging results are shown in Fig. 9. As we can see in Fig. 9(a), the difference of imaging results is quite significant for different height scatters: the higher the scatters, the worse the imaging results are. The scatters in Fig. 9(b) have the same qualities. The reason for the difference between the two figures is that the spatial-variant property is serious in segment 1, which results in migration through Doppler cells of the higher scatters. Note that the image in Fig. 9(a) is askew with respect to the scatter model, which is the image distortion caused by the time-varying bistatic angle.[15]
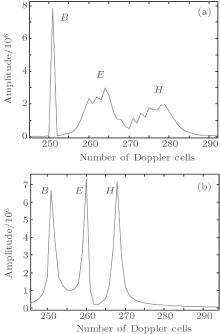
To quantitatively analyze the effect of height on migration through Doppler cells, the range cell where scatters B, E, and H stay, is extracted. The cross range results of two imaging segments are shown in Fig. 10. The difference in amplitude among the three scatters is large in segment 1, and the scatters E and H have serious mainlobe expansion. The scatters in segment 2 change a little.
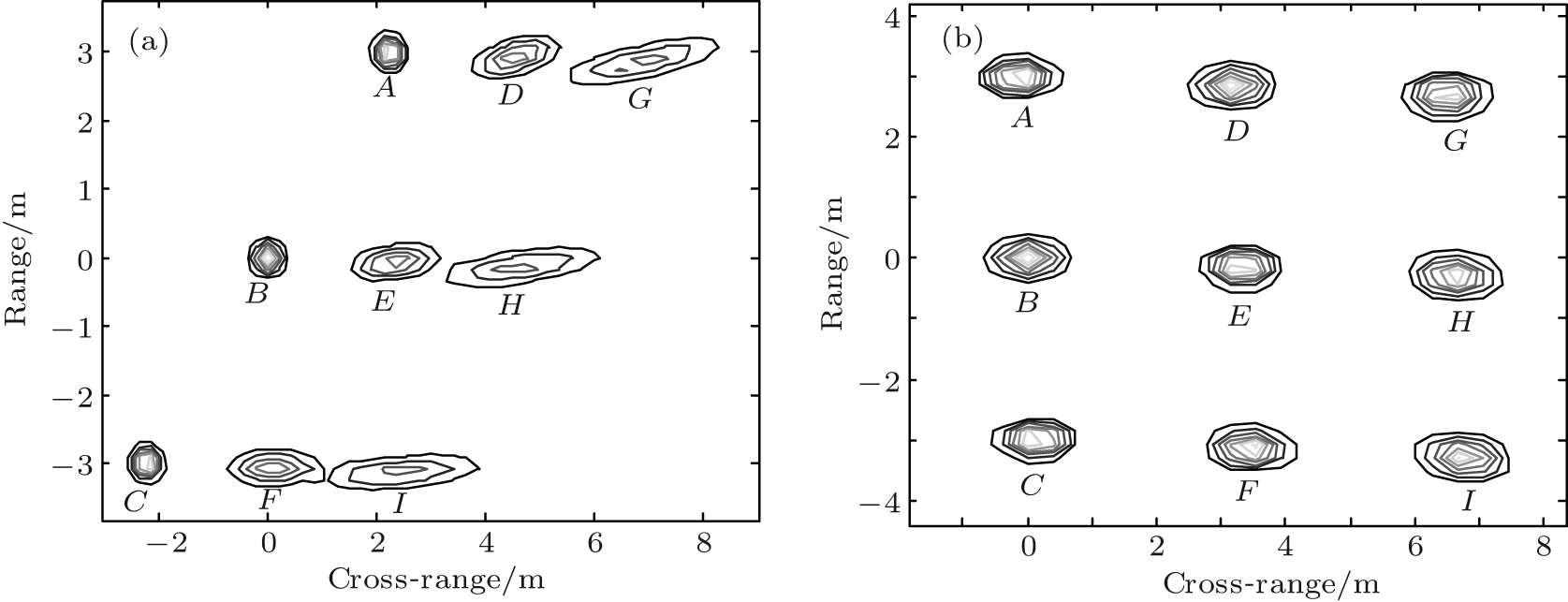 | Fig. 9. Imaging results of two segments: (a) segment 1; (b) segment 2. |
We calculate the range and cross range 3-dB mainlobe widths of scatters at different heights of the two imaging segments, and list the results in Table 3. In segment 1, the range 3-dB mainlobe widths of different scatters changes a little, but the cross range 3-dB mainlobe width occupies 1, 6, and 12 cross range cells when the heights are 0, 15, and 30 m. Compared with the result in Fig. 7(b), the scatter at the height of 30 m will cause about 12 Doppler cells to migrate, the imaging results of bistatic ISAR perfectly match the results in Fig. 7(b). The above results indicate the correctness of the analysis of the spatial-variant property. In segment 2, the range and cross range 3-dB mainlobe widths of different scatters are nearly the same. The results also confirm the conclusion shown in Fig. 7.
| Table 3. Statistical results of 3-dB mainlobe width. |
From the comparison between spatial-variant angle and bistatic ISAR imaging results, the actual imaging results are quite consistent with the theoretical analysis, which shows the correctness of the research on the spatial-variant property.
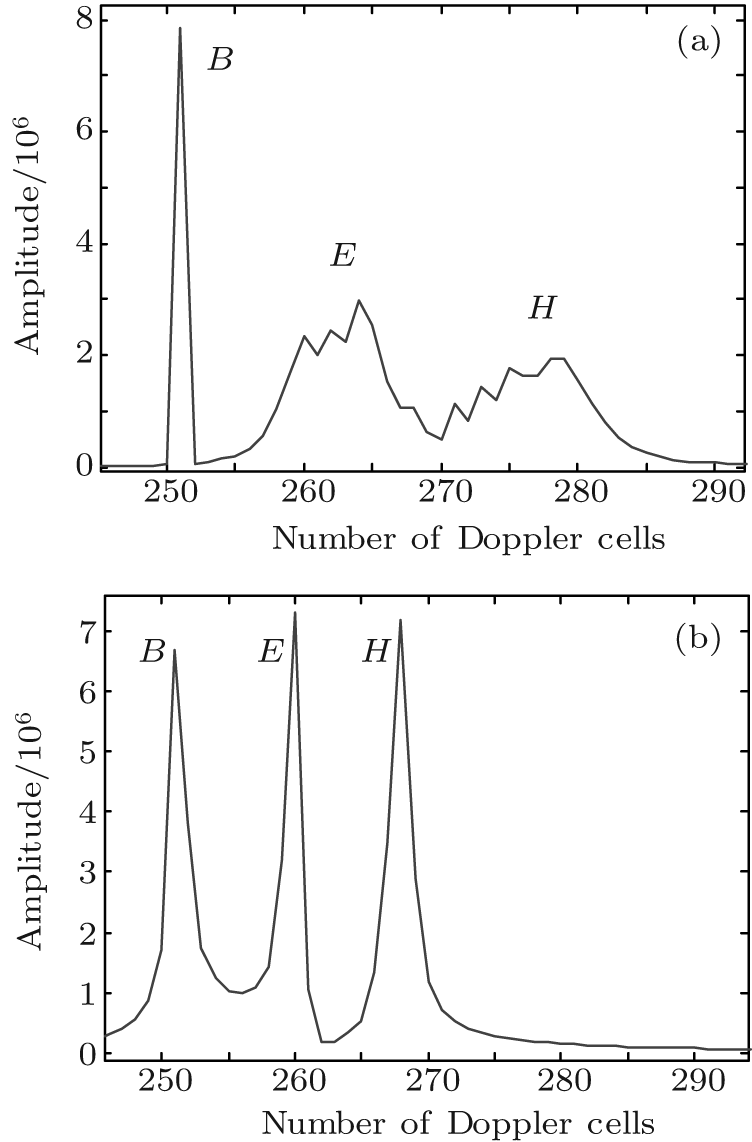 | Fig. 10. Comparisons of cross section between scatters at different heights: (a) segment 1 and (b) segment 2. |
In an ISAR system, the spatial-variant property of the imaging plane may affect the image quality. The spatial-variant property of the imaging plane of a space target is investigated in this paper. First, the target motion in orbit is simulated based on a two-body model. Second, the instantaneous imaging plane is determined by the vector analysis method. Then three Euler angles are introduced to describe the spatial-variant property of the imaging plane, and the effect of the spatial-variant property on the image quality is analyzed. Finally, the simulation and quantitative analysis are carried out. The results indicate the correctness of spatial-variant property analysis. The research in this paper is of great significance for the selection of imaging segment, and provides evidences for further work in data processing and compensation algorithm. Although the analysis of the spatial-variant property of the bistatic ISAR imaging plane is accomplished in this paper, further research on the correction algorithm of migration through resolution cells is needed.
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
|
| 19 |
|
| 20 |
|