
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cluster synchronization in community network with nonidentical nodes via intermittent pinning control*
[Gan Lu-Yi-Ning, Wu Zhao-Yan† , Gong Xiao-Li]
, Gong Xiao-Li]
, Gong Xiao-Li]
|
|


†Corresponding author. E-mail: zhywu7981@gmail.com
*Project supported jointly by the National Natural Science Foundation of China (Grant No. 61463022), the Natural Science Foundation of Jiangxi Province of China (Grant No. 20132BAB201016), the Natural Science Foundation of Jiangxi Educational Committee, Jiangxi Province, China (Grant No. GJJ14273), and the Graduate Innovation Fund of Jiangxi Normal University (Grant No. YJS2014061).
In this paper, cluster synchronization in community network with nonidentical nodes is investigated. By combining intermittency with a pinning control scheme, some effective controllers are designed. In the control scheme, only one node in each community is controlled and coupling weights of a spanning tree in each community are enhanced. Based on the Lyapunov function method and mathematical analysis technique, two results for achieving cluster synchronization are obtained. Noticeably, by introducing an adaptive strategy, some universal adaptive intermittent pinning controllers are designed for different networks. Finally, two numerical simulations are performed to verify the correctness of the derived results.
Over the past decade, synchronization and consensus as common features in complex dynamical networks have attracted more attention from a wide range of disciplines.[1– 26] Due to the complexity of real systems, many network models have been presented for better describing them, such as the directed network, weighted network, community network, colored network, and so on.[1– 12] Further, many synchronization manners including complete synchronization, cluster synchronization, and projective synchronization have been found in different networked systems. For achieving these synchronization manners, many control schemes have been proposed, such as intermittent control, pinning control, impulsive control, etc.
As we know, many real systems have a community structure, such as social and biological networks, [27] school friendship networks, [28] and congressional cosponsorship networks.[29] In a community network, the nodes in the same community usually have identical dynamics and intend to achieve the same goal, and the nodes in different communities have nonidentical dynamics and achieve different goals. That is, the network achieves cluster synchronization.[16– 25] Recently, cluster synchronization in dynamical networks has been extensively studied via different control schemes. Wang et al. studied the cluster synchronization in a community network with nonidentical nodes via feedback control.[13] Deng et al. studied the cluster synchronization in a community network via impulsive control.[14] Liu et al. studied the cluster synchronization in directed networks with identical nodes via intermittent pinning control.[18] Both static and adaptive intermittent pinning control schemes are considered. In this control scheme, only the first node in every cluster is controlled by intermittent controllers and only the coupling weights in each cluster are enhanced. As we know, the nodes in the same cluster usually have a large number of edges, i.e., the number of the coupling weights that need to be enhanced is very large. That is, the control cost may rise and the controllers are not easy to implement. From the view of practical applications, the less the number of the enhanced coupling weights, the cheaper the control cost and the easier the controllers are implemented. Therefore, what is the least number of the enhanced coupling weights and how to choose the enhanced coupling weights become important issues and deserve further studies.
The main contribution of this paper is to give the least number of the coupling weights that need to be enhanced and design universal controllers. Compared with Ref. [18], the node dynamics in this paper is assumed to be nonidentical for those in different communities, and the number of the coupling weights need to be enhanced is heavily reduced, i.e., only the coupling weights of a spanning tree in each community are enhanced. Similar to Ref. [18], only the first node in every community is controlled by intermittent feedback controllers. Firstly, the enhanced factor on the coupling weights is assumed as a constant. According to the Lyapunov function method and mathematical analysis technique, a sufficient condition for achieving cluster synchronization is derived. Secondly, the enhanced factor is not a constant but changes adaptively according to the given updating law, i.e., the cluster synchronization is achieved via adaptive intermittent pinning controllers. Finally, two numerical simulations are performed to verify the effectiveness and correctness of the derived results. Moreover, the adaptive intermittent pinning control scheme is universal for different networks to some extent.
The rest of this paper is organized as follows. In Section 2, the community network model with nonidentical nodes is introduced and some preliminaries are given. Combining the intermittent and pinning control method, proper intermittent pinning controllers are designed. In Section 3, two results for achieving cluster synchronization are derived. In Section 4, two numerical examples are provided to verify the effectiveness of the obtained results. In Section 5, this paper is concluded.
Consider a community network consisting of N nodes and m communities with 2 ≤ m < N, which can be described by

where xi(t) = (xi1(t), xi2(t), … , xin(t))T ∈ Rn is the state variable of node i, Γ = diag(γ 1, γ 2, … , γ n) is a positive-definite diagonal matrix and denotes the inner coupling matrix, 𝓥 k (k = 1, 2, … , m) denotes the set of all nodes belonging to the k-th community. The matrix A = (aij) ∈ RN × N is the zero-row-sum outer coupling matrix, which denotes the coupling strength and network topology, defined as, if there is a connection between node j and node i (i ≠ j), then aij = aji ≠ 0; otherwise, aij = 0. The function ϕ is defined as ϕ : {1, 2, … , N} → {1, 2, … , m}, if node i ∈ 𝓥 k, then ϕ (i) = k, denoted as ϕ i = k. The function fϕ i : Rn → Rn describes the node dynamics in the ϕ i-th community. Moreover, if ϕ i ≠ ϕ j, then fϕ i ≠ fϕ j, i.e., the node dynamics in different communities is assumed to be nonidentical.
Let sϕ i(t) be a solution of an isolated node in the ϕ i-th community, i.e., ṡ ϕ i(t) = fϕ i(sϕ i(t)), i = 1, 2, … , N. The community network (1) is said to achieve the cluster synchronization, if limt→ ∞ ‖ xi(t) − sϕ i(t)‖ = 0, where ‖ · ‖ denotes the Euclidean norm.
For convenience, assume that the N node is divided into 𝓥 σ = {rσ − 1 + 1, … , rσ } with r0 = 0 and rm = N, σ = 1, 2, … , m. Then, the matrix A can be represented in the following block form:
where Aij ∈ R(ri− ri− 1)× (rj− rj− 1).
Let 𝓔 k be the set of edges in the k-th community, 𝒢 k = 𝓥 k, 𝓔 k be the corresponding graph, and 
where k = 1, 2, … , m, l = 0, 1, 2, … , c(t) > 0 is control gain, K > 0 is a positive constant, T > 0 is control period, θ is control width with 0 < θ < T, c(t) > 0 is an enhanced factor to enhance the coupling weights of the spanning tree 
Define matrices à = (ã ij) ∈ RN× N and  = (â ij) ∈ RN× N as follows:
Similar to the block form of matrix A in Eq. (2), the matrices à and  can be written as

where à ij ∈ R(ri− ri− 1)× (rj− rj− 1),  ii ∈ R(ri− ri− 1)× (ri− ri− 1). Let ei(t) = xi(t) − sϕ i(t), 


Definition 1 Matrix A = (aij) ∈ RN× N is said to belong to class M1, denoted as A ∈ M1, if: i) aij = aji ≥ 0, i ≠ j, aii = − ∑ j= 1, j≠ iaij, i = 1, 2, … , N; ii) A is irreducible.
Definition 2 Matrix A = (aij) ∈ RN1× N2 is said to belong to class M2, denoted as A ∈ M2, if each of its row-sum is zero.
Definition 3 Suppose that A ∈ RN× N can be divided into the following block form

where Aij ∈ R(ri− ri− 1)× (rj− rj− 1). Matrix A is said to belong to class M3, denoted as A ∈ M3, if Aii ∈ M1, and Aij ∈ M2 (i ≠ j).
Lemma 1[5] If A = (aij) ∈ Rm× m is an irreducible matrix with Rank(A) = m − 1 and satisfying Aij = Aji ≥ 0, if i ≠ j, and 
are negative.
Lemma 2[18] Suppose

where x(t) ∈ R, M(· ) : R → R is continuous and satisfies xM(x) ≤ LMx2, where LM > 0, and M(0) = 0. Function H(t) : {0∪ R+ } → R is the adaptive intermittent feedback control gain defined as

with the following rule

then

Assumption 1 Suppose that there exists a positive-definite diagonal matrix Δ = diag(δ 1, δ 2, … , δ n) such that the function fk(x) satisfies

for all x, y ∈ Rn, k = 1, 2, … , m.
In this section, the cluster synchronization of network (3) is considered in two cases: (i) c(t) is chosen as a constant, i.e., c(t) ≡ c; (ii) c(t) changes according to an adaptive law. Let λ 1, λ 2, and λ 3 be the largest eigenvalues of the matrices  ⊗ Γ , IN ⊗ Δ + à ⊗ Γ , and IN ⊗ Δ + A ⊗ Γ respectively.
Theorem 1 Suppose that Assumption 1 holds, A ∈ M3 and c(t) is chosen as a constant c. If the following condition

holds, then the controlled community network (3) can achieve cluster synchronization.
Proof Consider the following Lyapunov function

When t ∈ [lT, lT + θ ), the derivative of V(t) along the trajectories of Eq. (4) can be calculated as

which gives

When t ∈ [lT + θ , (l + 1)T), one has
which gives

According to inequalities (7) and (8), for l = 0, one has

for l = 1, one has
According to mathematical induction, one has

Then, if condition (6) holds, one has liml→ ∞ V((l + 1)T) = 0, which implies V(t) → 0 and ei(t) → 0 as t → ∞ . That is, the cluster synchronization is achieved and the proof is completed.
Remark 1 According to Lemma 1 and the definition of  , one has  ii is a negative-definite matrix. Therefore, the largest eigenvalue of matrix  ⊗ Γ is negative, i.e., λ 1 < 0. In other words, for any given network with fixed T and θ , one can always choose c > (− λ 3(T − θ ) − λ 2θ )/(λ 1θ ) such that condition (6) holds. However, the estimated value of c may be much larger than the needed one, i.e., the condition is conservative. On the other hand, the node dynamics and topological structures of different networks are usually nonidentical. That is, the controllers with fixed c, T, and θ are not universal for different networks. In the following, for designing universal controllers, c(t) is not chosen as a constant, but changes adaptively according to the updating law.
Theorem 2 Suppose that Assumption 1 holds and A ∈ M3. The controlled community network (3) with the following adaptive rules
can achieve cluster synchronization, where η > 0 is the adaptive gain.
Proof Let F(E(t)) = (FT(E1(t)), … , FT(Em(t)))T, then the error system (4) can be written as



Define a function

Then, the error system (10) can be written as

and one has

Choose Q(t) = ET(t)E(t), then the derivative of Q(t) along the trajectories of Eq. (12) can be calculated as

Then, according to Lemma 2 and the proof of Theorem 3 in Ref. [18], one has

which gives

That is, the cluster synchronization is achieved and the proof is completed.
Remark 2 From Theorem 2, it is clear that the largest eigenvalues λ 1, λ 2, and λ 3 do not need to be known beforehand for estimating the control period T, control width θ or the control gain c. In other words, for different networks with different T and θ , the control gain c(t) can adjust itself to the proper value, i.e., the proposed control scheme is universal to some extent.
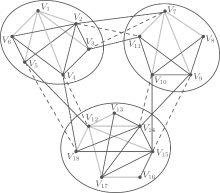
Consider a community network consisting of 18 nodes and 3 communities, which is shown in Fig. 1. The outer coupling matrix A in Fig. 1 is defined as: if nodes i and j (j ≠ i) are connected by a solid line, then aij = 1; if nodes i and j (j ≠ i) are connected by a dashed line, then aij = − 1. Figure 2 shows the spanning trees of 3 communities respectively. Choose the node dynamics of the first community as a Lorenz system:[30]


the second community as a Chen system:[31]

the third community as a Lü system:[32]

and the inner coupling matrix as an identity matrix, i.e., Γ = diag{1, 1, 1}.
 | Fig. 1. A community network consists of 18 nodes with 3 communities. The top-left, top-right, and bottom are the first, second, and third communities respectively. The outer coupling matrix A is defined as: if nodes i and j (j ≠ i) are connected by a solid line, then aij = 1; if nodes i and j (j ≠ i) are connected by a dashed line, then aij = − 1. |
According to the discussion about the Chen system in Ref. [6], one can discuss the Lorenz and Lü systems and choose the positive-definite diagonal matrix Δ = 55I3 such that Assumption 1 holds.
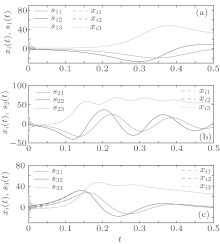
Example 1 Consider the cluster synchronization of community network (3) with constant control gain, i.e., c(t) = c. In numerical simulations, choose T = 0.1, θ = 0.09, K = 10, the spanning trees 𝒯 k (k = 1, 2, 3) as the blue lines in Fig. 2. By simple calculations, one has λ 1 = − 0.3482, λ 2 = 55.9447, and λ 3 = 55. According to Remark 1, one can choose c = 179 such that condition (6) holds. Moreover, the initial values of xi(t) and sϕ i(t) are chosen randomly. Figure 3 shows the orbits of xi(t) and sϕ i(t) in the 3 communities respectively.
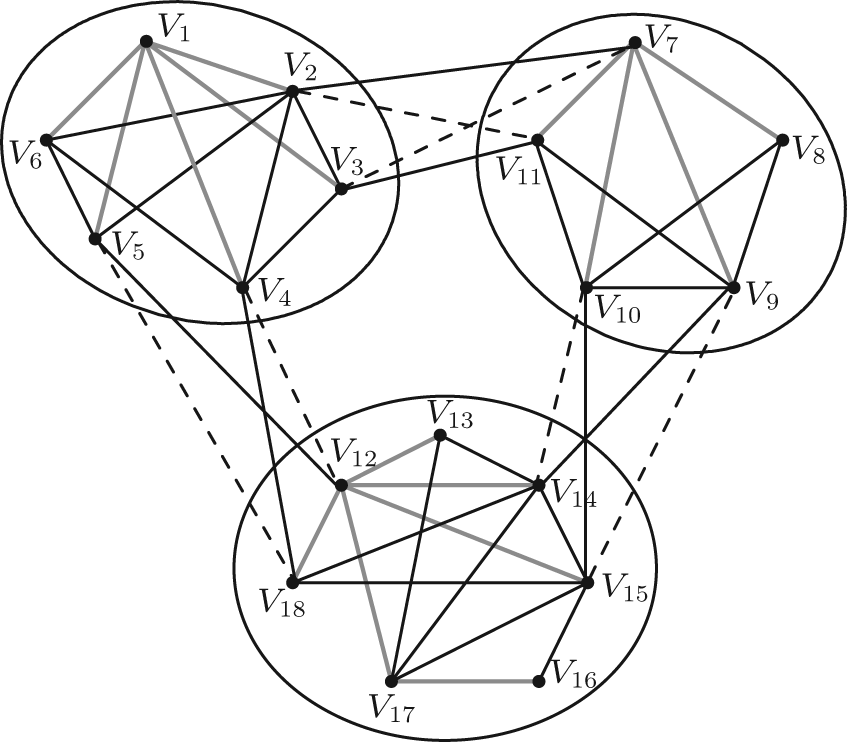 | Fig. 2. The blue lines denote three spanning trees of the three communities in Fig. 1. |
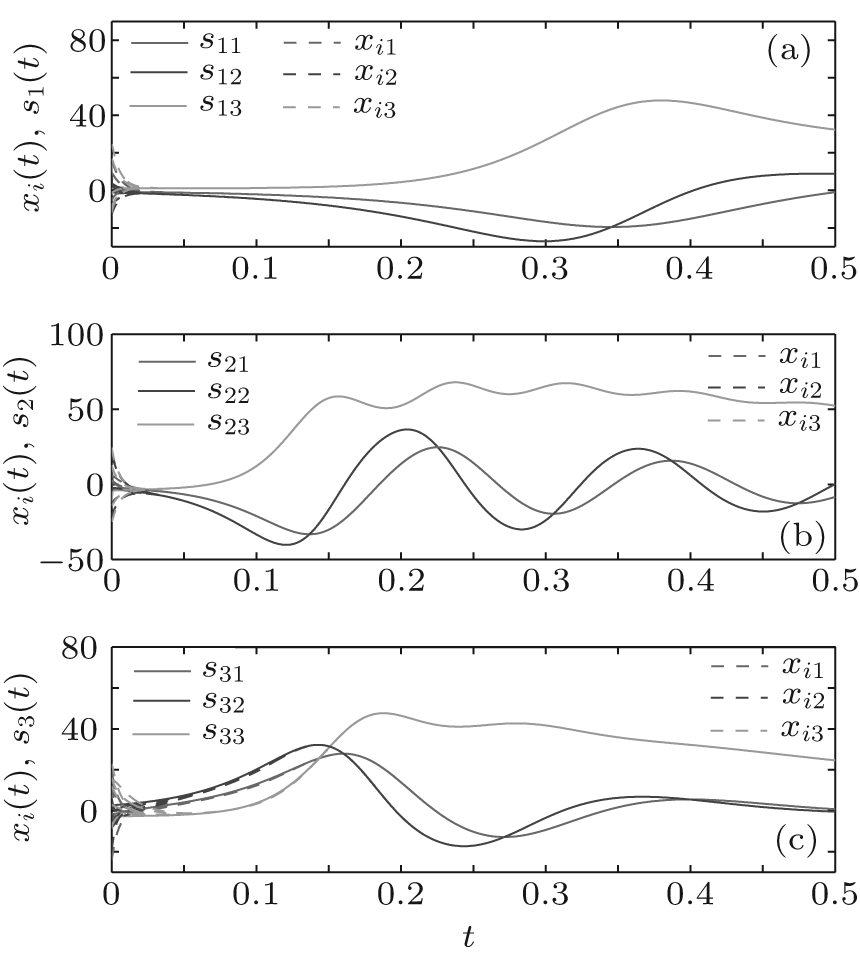 | Fig. 3. The orbits of xi(t) and sϕ i(t) in 3 communities, i = 1, 2, … , 18. The top, middle, and bottom denote the first, second, and third communities respectively. |
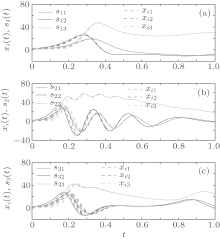
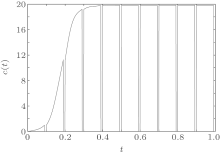
Example 2 Consider the cluster synchronization of community network (3) with adaptive control gain in system (9). In numerical simulations, choose the same parameters as those in Example 1 and η = 0.05. Figure 4 shows the orbits of xi(t) and sϕ i(t) in 3 communities respectively. Figure 5 shows the orbits of the adaptive gain c(t). From Fig. 5, it is clear that the needed value of control gain c is much less than the estimated value in Example 1.
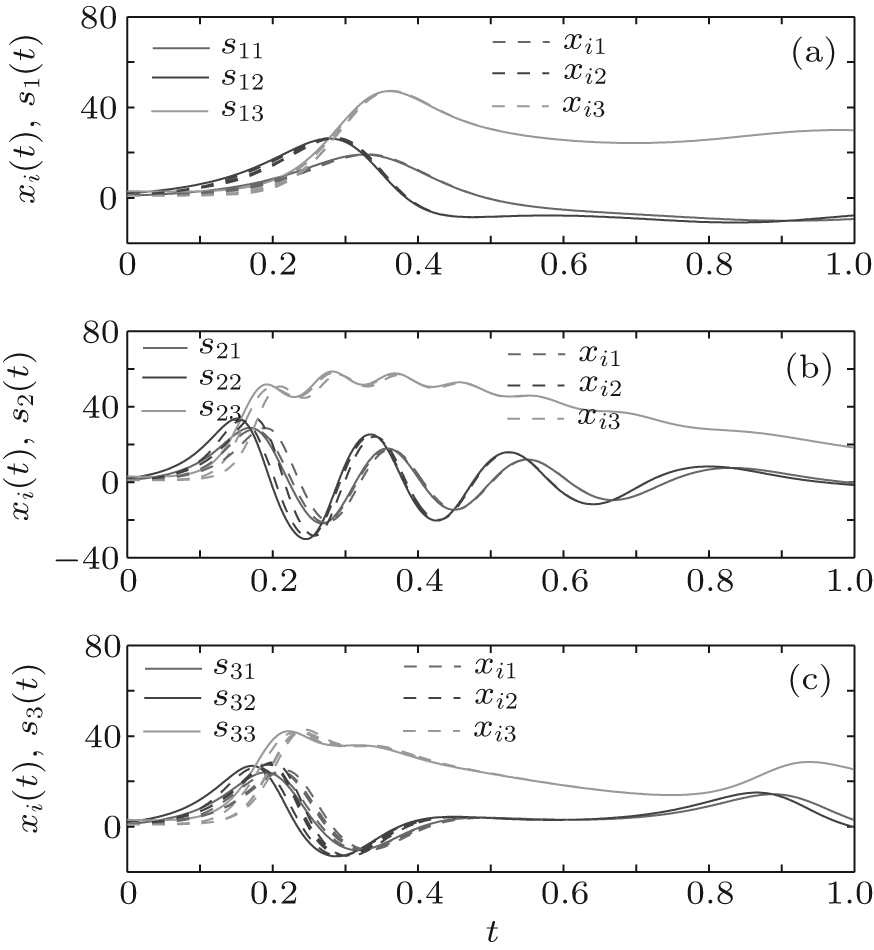 | Fig. 4. The orbits of xi(t) and sϕ i(t) in 3 communities, i = 1, 2, … , 18. The top, middle, and bottom denote the first, second, and third communities respectively. |
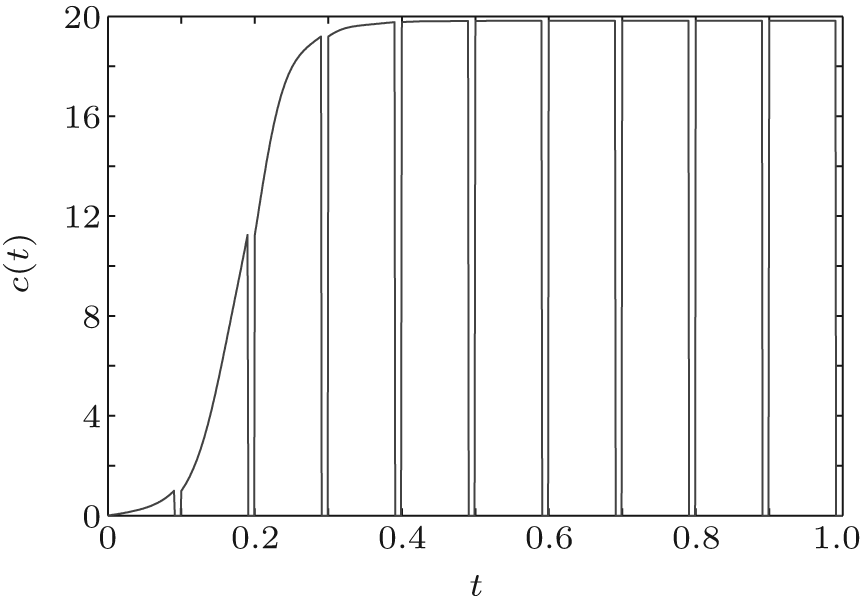 | Fig. 5. The orbit of the adaptive control gain c(t). |
In this paper, proper intermittent pinning controllers are designed for achieving cluster synchronization in a community network with nonidentical nodes. In the proposed control scheme, in each community, only the first node is controlled and only the coupling weights of a spanning tree are enhanced. The enhanced factor is first assumed to be a constant and a corresponding sufficient condition is provided. Further, the enhanced factor changes adaptively and adaptive intermittent pinning controllers are designed. Noticeably, due to the fact that the enhanced factor can adjust itself to the proper value for the given network with a fixed control width and period, the adaptive intermittent pinning control scheme is universal for different community networks. Finally, the obtained results are illustrated by two numerical examples.
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
|
| 19 |
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
|
| 28 |
|
| 29 |
|
| 30 |
|
| 31 |
|
| 32 |
|