A new collision avoidance model for pedestrian dynamics
Wang Qian-Linga) , Chen Yaob) , Dong Hai-Ronga)†  , Zhou Min
, Zhou Mina) , Ning Bina)
, Zhou Min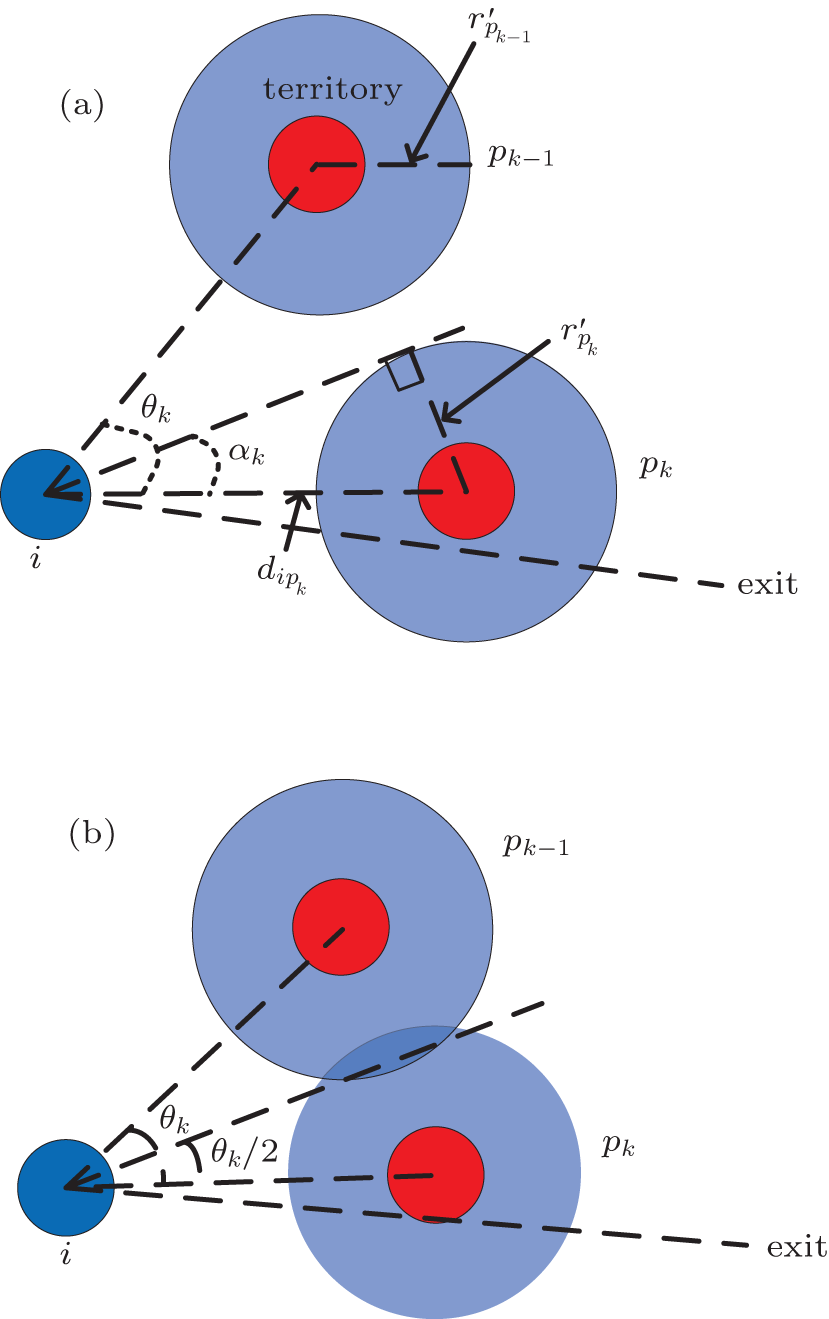
A new collision avoidance model for pedestrian dynamics |
|
Wang Qian-Ling
, Zhou Min |
| Illustration of the territory of a pedestrian and the desired direction. (a) The desired direction when the environment is not crowed. (b) The desired direction when the environment is crowded. |
| |