Policy iteration optimal tracking control for chaotic systems by using an adaptive dynamic programming approach
Wei Qing-Lai† , Liu De-Rong, Xu Yan-Cai
, Liu De-Rong, Xu Yan-Cai
, Liu De-Rong, Xu Yan-Cai 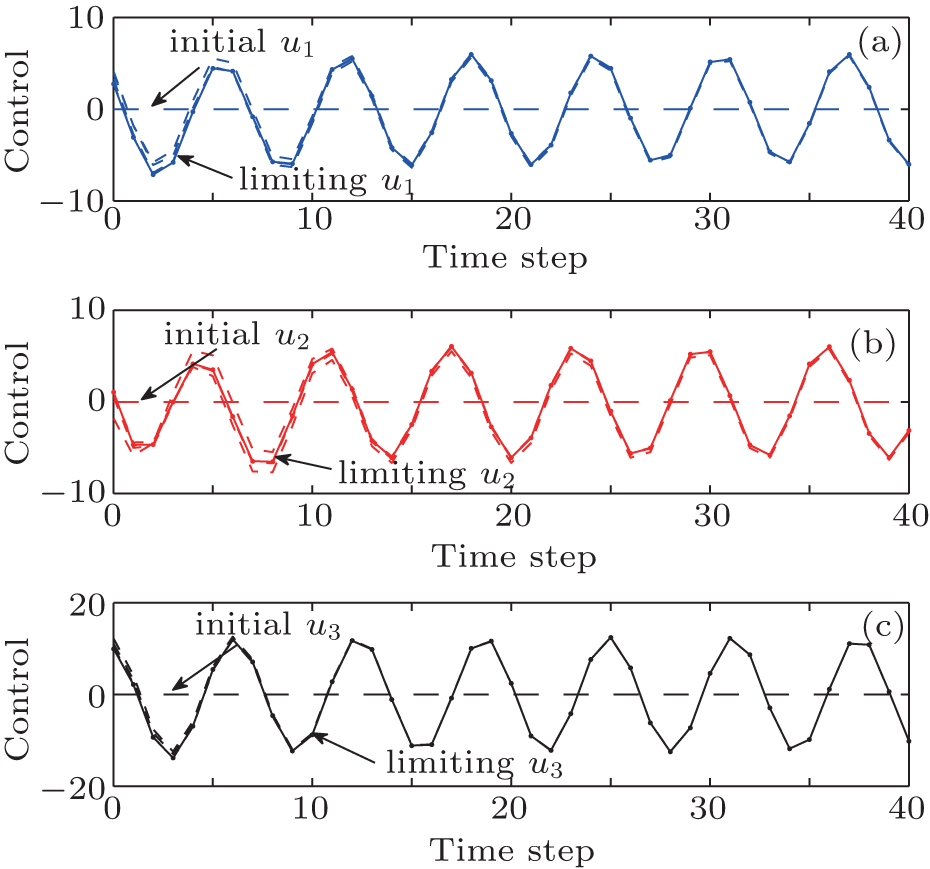
Policy iteration optimal tracking control for chaotic systems by using an adaptive dynamic programming approach |
|
Wei Qing-Lai†
, Liu De-Rong, Xu Yan-Cai |
| The trajectories of controls u 1, u 2, and u 3 in the policy iteration algorithm. |
| |