Neural adaptive chaotic control with constrained input using state and output feedback
Neural adaptive chaotic control with constrained input using state and output feedback |
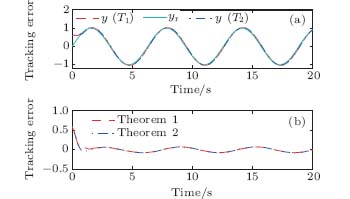
| Fig. 8. a Tracking performance of Arneodo system dashed line: output using Theorem#cod#x0A0;1, solid line: reference signal, dot-dashed line: output using Theorem#cod#x0A0;2. b Tracking errors dashed line: error using Theorem#cod#x0A0;1, dot-dashed line: error using Theorem#cod#x0A0;2. |
| |