
{kind=link}
{kind=link}
Unstable and exact periodic solutions of three-particles time-dependent FPU chains
[Liu Qi-Huaia), b) , Xing Ming-Yana) , Li Xin-Xiang†c)  , Wang Chao
, Wang Chaod) ]
, Wang Chao|
|


†Corresponding author. E-mail: xinxiang.lee@t.shu.edu.cn
*Project supported by the National Natural Science Foundation of China (Grant Nos. 11301106, 11201288, and 11261013), the Natural Science Foundation of Guangxi Zhuang Autonomous Region, China (Grant No. 2014GXNSFBA118017), the Innovation Project of Graduate Education of Guangxi Zhuang Autonomous Region, China, (Grant No. YCSZ2014143), and the Guangxi Experiment Center of Information Science (Grant No. YB1410).
For lower dimensional Fermi–Pasta–Ulam (FPU) chains, the α-chain is completely integrable and the Hamiltonian of the β-chain can be identified with the Hénon–Heiles Hamiltonian. When the strengths α, β of the nonlinearities depend on time periodically with the same frequencies as the natural angular frequencies, the resonance phenomenon is inevitable. In this paper, for certain periodic functions α( t) and β( t) with resonance frequencies, we give the existence and stability of some nontrivial exact periodic solutions for a one-dimensional α β-FPU model composed of three particles with periodic boundary conditions.
Consider the time-dependent Hamiltonian

where

where h.o.t. denotes the high order terms of z4, α (t) and β (t) are continuous 2π -periodic functions, which characterise the strength of the nonlinearities. The lattice dynamics corresponding to Hamiltonian (1) is governed by the following system of coupled equations

where qj denotes the displacement of the j-th oscillator with respect to its rest point position.
When H is independent of time, equation (2) is called a Fermi– Pasta– Ulam (FPU) system which was initially introduced to answer various sophisticated questions related to irreversible statistical mechanics and to test the simplest and most widely believed assertions of equilibrium statistical mechanics such as equipartition of energy, ergodicity by Fermi, Pasta, and Ulam in 1955.[1] The chain is called an α -chain if β ≡ 0, α ≠ 0 and a β -chain if α ≡ 0, β ≠ 0.[2, 3] Starting from the first numerical results of FPU, both theoretical and numerical findings are discussed in close connection with the problems of ergodicity, [4, 5] integrability, [6, 7] chaos and stability of motion.[8– 13]
The FPU model with the time-dependent nonlinear term is used to explore the relation between the thermodynamic entropy change due to irreversible processes and the change of information loss as a chaotic dynamical system (see Ref. [14] for instance). Although the time-dependent FPU Hamiltonian (1) can be considered as a perturbation of the harmonic oscillator by rescaling a small parameter, qj ↔ ϵ qj, the dynamics of inharmonic lattices display a rich variety of features: periodic motions, [15– 17] quasi-periodic invariant tori, [18] discrete solitons and breather.[19– 21] Motivated by the recent paper, [17] where the authors prove the existence and multiplicity of periodic solutions of Eq. (2) under certain appropriate conditions with non-identical action potential V, we perform the calculation of periodic orbits and study their stability by the averaging theory for the three particles time-dependent FPU chains. Compared with Ref. [17], where the potentials have a linear growth at infinity, the classical model (2) does not meet the conditions in this case. The objective of this paper is to provide a system of nonlinear equations whose simple zeros provide periodic solutions of Eq. (2).
The rest of this paper is organized as follows. We shall present the basic results from averaging theory in Section 2 and introduce the procedure of reducing to standard form in Section 3. Finally, in Section 4 we shall apply these theories to three particles time-dependent FPU chains where the period of α , β taken by 



The method of averaging is a transformation procedure leading to a systematic perturbation expansion complete with error bounds on the difference between exact and approximate solutions, [22] and it is an important tool in the rigorous study of differential equations with a small parameter for proving properties of the exact problem based on properties of the approximate problem. A good example of applying the method of averaging to a beam dynamics problem is given by Ellison and Shih.[23]
Consider the following system of the standard form of averaging

where f : ℝ × Ω × [0, 1] → ℝ n is Cr(r ≥ 1), bounded on bounded sets and T-periodic in t, and Ω is a bounded and open subset of ℝ n. The associated autonomous averaged system is defined as

Now we state the averaging theorem, and the proof can be found in Refs. [24] and [25].
Theorem 1 (averaging theorem) There exists a Cr change of coordinates x = x̄ + ϵ w(t, x̄ , ϵ ) under which equation (3) becomes

where f : ℝ × Ω × [0, 1] → ℝ n is T-periodic in t. Moreover: (i) If x(t) and x̄ (t) are solutions of Eqs. (3) and (4) with the initial values x(t) = x0 and x̄ (t) = x̄ 0, respectively, and (ii) If a0 is a non-degenerate rest point of Eq. (4), so that f̄ (ā 0) = 0 and Df̄ (ā 0) is nonsingular. Then there exists ϵ 0 > 0 such that, for all 0 < ϵ ≤ ϵ 0, equation (3) possesses a unique T-periodic orbit x(t; aϵ , ϵ ) such that (iii) If the rest point a0 of Eq. (4) is hyperbolic, then the T-periodic orbit x(t; aϵ , ϵ ) of Eq. (3) is hyperbolic, and its unstable dimension is one greater than that of the rest point. (iv) If xs(t) ∈ Ws(x(t; aϵ , ϵ )) is a solution of Eq. (3) lying in the stable manifold of the hyperbolic periodic orbit x(t; aϵ , ϵ ), x̄ s(t) ∈ Ws(a0) is a solution of Eq. (4) lying in the stable manifold of the hyperbolic fixed point a0 and 




We remark that in the change of coordinates, w(t, x̄ , ϵ ) is given by

Consider the system

where q, p ∈ ℝ n, A is a real n × n symmetric matrix and positive semi-definite, ϵ is a sufficiently small real parameter and h : ℝ × ℝ n × ℝ n × [0, ϵ 0] → ℝ n is a smooth T-periodic function. We are concerned in this section with the procedure of reducing Eq. (6) to standard form.
Firstly, since A is symmetric and positive semi-definite, it is always orthogonally diagonalizable and has only real and non-negative eigenvalues λ 1, λ 2, … , λ n. Therefore, there exists an orthogonal matrix B such that BABT = Λ and BTB = I, where Λ = diag(λ 1, λ 2, … , λ n), I is the identity matrix and BT denotes the transpose of matrix B. Now we take an orthogonal transformation by

and let 

where h̃ i denotes the i-th row of the vector Bh.
Consequently, in case there exists i such that ω i = 0 and h̃ i(t, BTq̄ , BTp̄ , ϵ ) ≡ 0, we can solve q̄ i(t) directly. For ω i > 0, i ∈ {1, 2, … , n}, to obtain a system of a differential equation in the standard form for averaging, instead of amplitude-phase variables in the usual way we introduce the symplectic transformation by

which transforms system (7) into

We denote the index sets by 𝓙 = {i : 1 ≤ i ≤ n, ω i = 0}, 



Usually, system (10) is a quasi-periodic system while the frequencies ω i are rational independent. The form of averaging corresponds to taking quasi-periodic averaging. For seeking periodic solutions, we assume that all positive eigenvalues λ i are identical so that ω i ≡ ω , or all positive eigenvalues such that 
In this section, we take

where α , β are T-periodic functions with 


which corresponds to the Hamilton system
where the real 3 × 3 symmetric matrix A is given by

Obviously, A is positive semi-definite.
Now we take an orthogonal transformation by
then system (11) transforms into
In view of system (13), since equations of q̄ 3, p̄ 3 are integrable, we drop these equations in the subsequent discussion. System (13) has the periodic solution if and only if we take q̄ 3 = p̄ 3 = 0.
We introduce a symplectic transformation by
which transforms system (13) into the standard form of averaging

where


Substituting 

In order to find the rest points of system (16), we have to solve the algebraic equations while letting the right-hand of system (16) equal zero. It seems that the algebraic equations are very complicated, but it is easy to solve. We have found nine non-degenerate rest points listed in Table 1. From Table 1, we know that the real part of eigenvalues of Jacobi matrix corresponding to the first three rest points are zero, while the others are nonzero which implies these rest points are unstable. Applying the averaging theorem (see Theorem 1), we conclude our result in the following.
| Table 1. Nine non-degenerate rest points of system (16). |
Theorem 2 For any real number α 0, let 



Moreover, six of them 
Proof Proceeding as discussed above, in view of Table 1, we have found nine non-degenerate rest points 



Furthermore, for each i ∈ {4, … , 9}, the Jacobi matrix corresponding to rest point Pi has an eigenvalue with positive real part, which yields that periodic solutions 
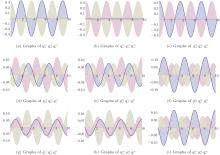
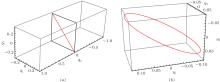
From Theorem 2, we know that the existence of periodic solutions of Hamilton system (11) are unrelated to the choice of coefficient α 0. In fact, for autonomous three-dimensional FPU chains, the α -chain, which does not contain a resonant term, is completely integrable. We plot the curves of periodic solutions in Fig. 1, and in Fig. 2 we plot the parametric curves generated by periodic solutions of system (11) in the configuration space (q1, q2, q3). From Fig. 2, we can see that the periodic solutions have two kinds of different properties: one kind of periodic solutions run linear motion (see Fig. 2(a)) while the other kind of periodic solutions move on a closed curve (see Fig. 2(b)) in the configuration space (q1, q2, q3).
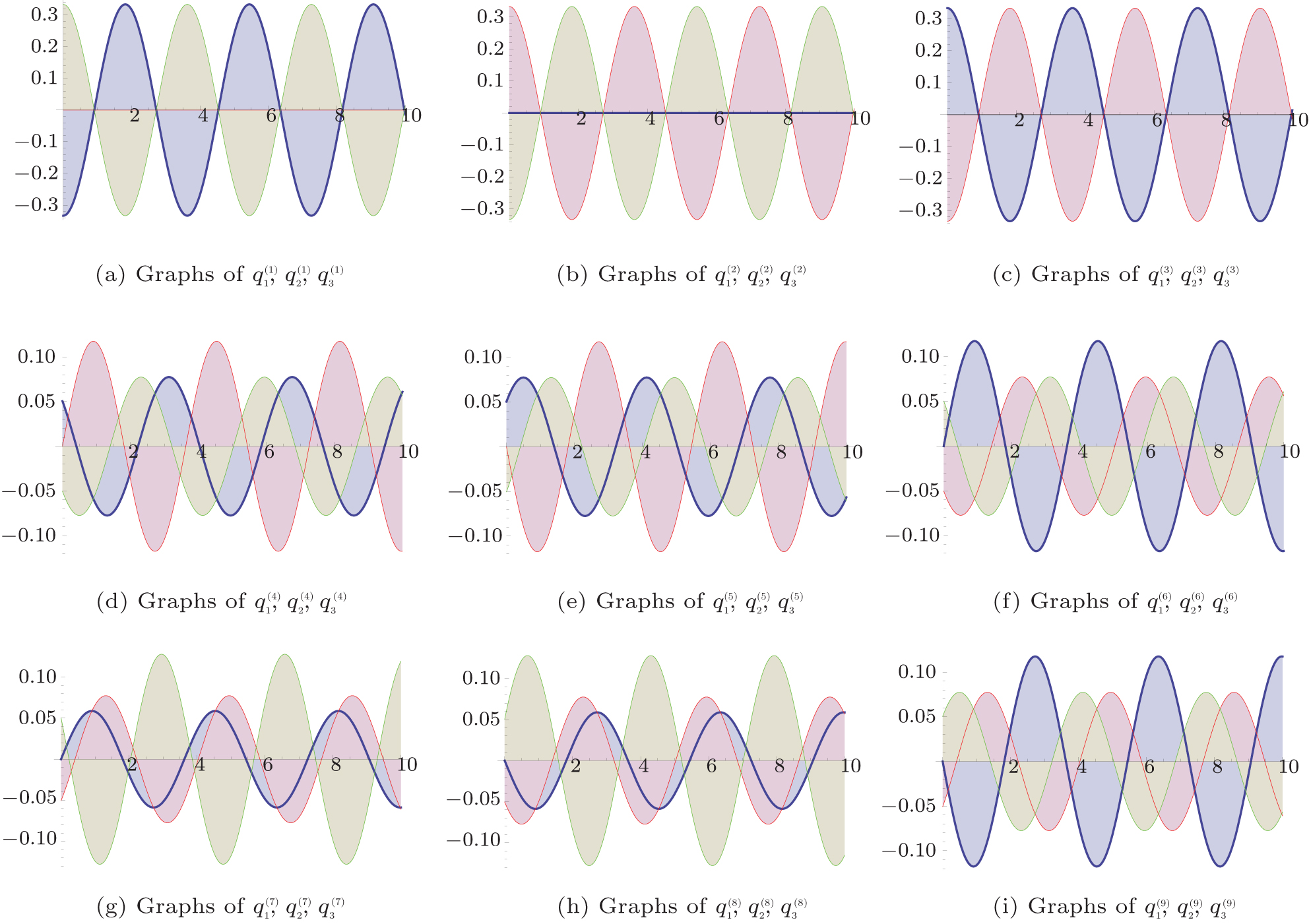 | Fig. 1. The profiles of    |
 | Fig. 2. The profiles of parametric curves generated by periodic solutions of system (11). |
In Fig. 1, all of the expressions for variables 






In this subsection, in order to investigate the variety of the number of periodic solutions, we add a resonant term 


Similar to the previous subsection, we obtain seventeen non-degenerate rest points for system (17) listed in Table 2 and fifteen of them are unstable. By using an averaging theorem we conclude the result below without proof.
| Table 2. Seventeen non-degenerate rest points of system (17). |
Theorem 3 Assume that 




Moreover, fifteen of them 
We have used the averaging theory, one of the important tools in the area of dynamical systems, for studying analytically the existence of periodic orbits and their stability adapted to three particles time-dependent FPU chains. To some extent, the existence of all these periodic solutions is attributed to the existence of resonance terms for α and β . We have found nine periodic solutions with six of them being unstable when we take the “ test” functions 


When considering the FPU model with a larger number of particles, we know that the linear spectrums, the frequencies of the normal models, are dense in the closed interval [0, 2]. There will occur multiple rationally independent frequencies, which leads to a quasi-periodic system. For instance, for FPU chains composed of four particles, the transformed systems have the linear spectrums 2 and 
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
|
| 19 |
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 | [Cited within:1] |
| 24 |
|
| 25 |
|