V–L decomposition of a novel full-waveform lidar system based on virtual instrument technique
Xu Fan† , Wang Yuan-Qing‡
, Wang Yuan-Qing‡
, Wang Yuan-Qing‡ 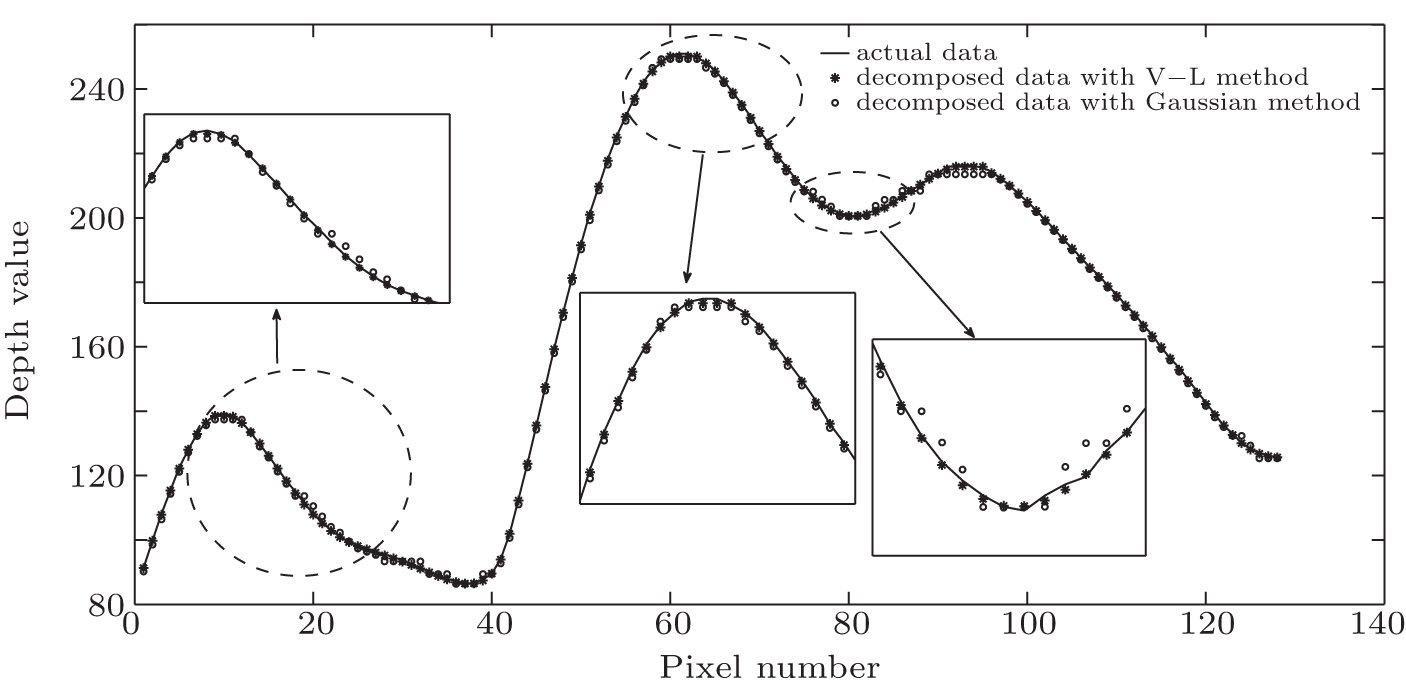
V–L decomposition of a novel full-waveform lidar system based on virtual instrument technique |
|
Xu Fan†
, Wang Yuan-Qing‡ |
| Comparison between V–L and Gaussian decomposition. We select 128 pixels from the target, which are used to implement decomposition. The results by the V–L method (represented by an asterisk), the results by the Gaussian method (represented by a circle) and the actual depth information (represented by a solid line) are all plotted. The dashed boxes shown in the figure are the enlarged views of three particular areas. |
| |