












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Nonlinear density wave and energy consumption investigation of traffic flow on a curved road
Cite this Article
Jin Zhizhan, Cheng Rongjun, Ge Hongxia. Nonlinear density wave and energy consumption investigation of traffic flow on a curved road. Chinese Physics B, 2017, 26(11): 110504 
Permissions
Nonlinear density wave and energy consumption investigation of traffic flow on a curved road
† Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant No. 11372166), the Scientific Research Fund of Zhejiang Province, China (Grant Nos. LY15A020007 and LY15E080013), the Natural Science Foundation of Ningbo, China (Grant Nos. 2014A610028 and 2014A610022), and the K. C. Wong Magna Fund in Ningbo University, China.
Abstract
A new car-following model is proposed based on the full velocity difference model (FVDM) taking the influence of the friction coefficient and the road curvature into account. Through the control theory, the stability conditions are obtained, and by using nonlinear analysis, the time-dependent Ginzburg–Landau (TDGL) equation and the modified Korteweg–de Vries (mKdV) equation are derived. Furthermore, the connection between TDGL and mKdV equations is also given. The numerical simulation is consistent with the theoretical analysis. The evolution of a traffic jam and the corresponding energy consumption are explored. The numerical results show that the control scheme is effective not only to suppress the traffic jam but also to reduce the energy consumption.
Keyword:car-following model;curved road;energy consumption;time-dependent Ginzburg-Landau (TDGL) equation
1. Introduction
In the last few years, with the development of the economy, the influence of traffic jams on people’s life has become more and more serious. Therefore, many traffic flow models[1–15] have been proposed to research traffic congestion by using linear analysis and nonlinear analysis, such as the car-following models,[16–28] the cellular automation models,[29–32] the gas kinetic models,[33–36] and the hydrodynamic lattice models.[37–40]
The research of transport has been gradually developed into three major directions. Generally, traffic flow models have been divided into three types: macroscopic models, microscopic models, and mesoscopic models. One of the most typical models is the optimal velocity model (for short, OVM) proposed by Bando et al.[41] in 1995, in which the differential equation of the optimal velocity model is obtained by Taylor expansion. The problem of infinite acceleration is solved in OVM: it can simulate many qualitative characteristics of the actual traffic flow, such as traffic congestion, congestion evolution, and so on. In order to solve the problems of high acceleration and unrealistic deceleration in OVM, Helbing and Tilch[42] developed a generalized force model (for short, GFM) by considering the negative velocity difference on the basis of OVM. But GFM cannot describe the delay time of car motion and the kinematic wave speed at jam density. Jiang et al.[43] put forward the full velocity difference model (for short, FVDM) by considering the positive velocity difference based on GFM. However, FVDM has too high deceleration. Ge et al.[44] put forward a two-velocity difference model (for short, TVDM) to solve these problems. There is no doubt that the authors have prominently contributed to the modeling of traffic flow and to promoting the development of the theory for traffic flow. Previous research results have enriched and improved the model of traffic theory.
As is well known, roads are not always straight and there are lots of curved roads;[45,46] however, there has been little research on curved roads using the car-following model. Therefore, based on FVDM, this paper studies the evolution trend of the traffic flow in a bend. We will present a modified model for the curved road and investigate the stability from the perspective of energy consumption.[47]
On the basis of previous studies, a new car-following model is proposed. In section
2. The new model and linear stability analysis
We consider the case in which vehicles run ahead on a single-lane curved road under open boundary conditions. At the same time, the effects of the friction coefficient and curve radius are also considered. A centripetal force 

According to the above mentioned idea, we derive a new mathematical model. The motion equation is

The optimal velocity function is proposed as follows:


In addition, we take into account the relationship between the energy consumption and vehicle stability. The energy consumption of each vehicle on a curved road can be investigated in more details on the basis of the kinetic energy theorem, which describes every vehicle to do work through consuming energy. By describing the change of the vehicle in two adjacent moments, the change of the kinetic energy is defined as


Then linear stability analysis can be conducted. We can compare the new model for traffic flow on a curved road with the previous models. The derivative of the radian is the angular velocity. Therefore, the stable condition can be given as follows:



The linearized system (



By Laplace transformation, the linearized system can be written as


As 





For small disturbance with long wavelengths, the uniform traffic flow is instable in the condition
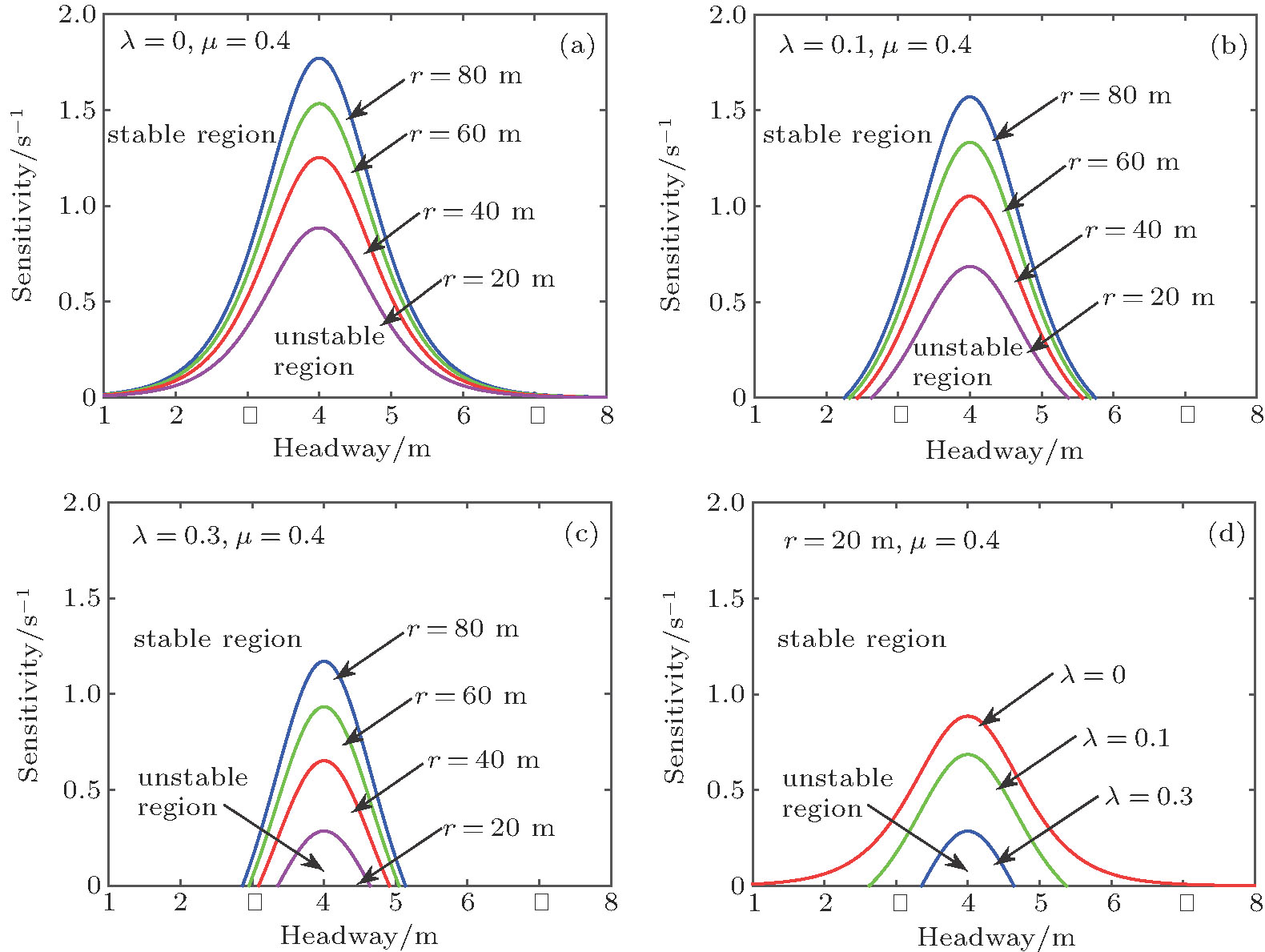
Figure 



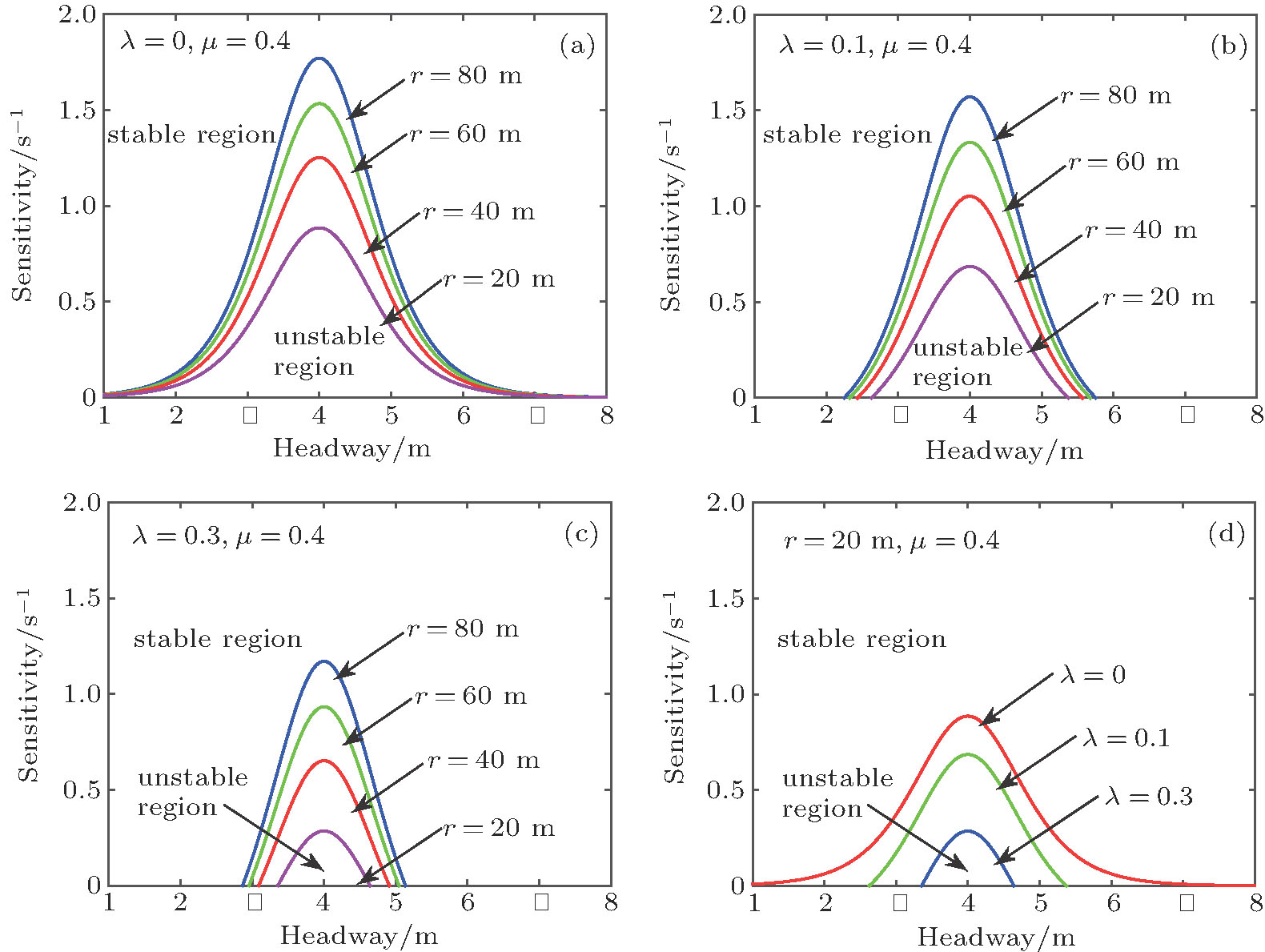 | Fig. 1. (color online) The phase diagram of the model with different parameters λ and r. |
As can be seen from Figs.
Figure 



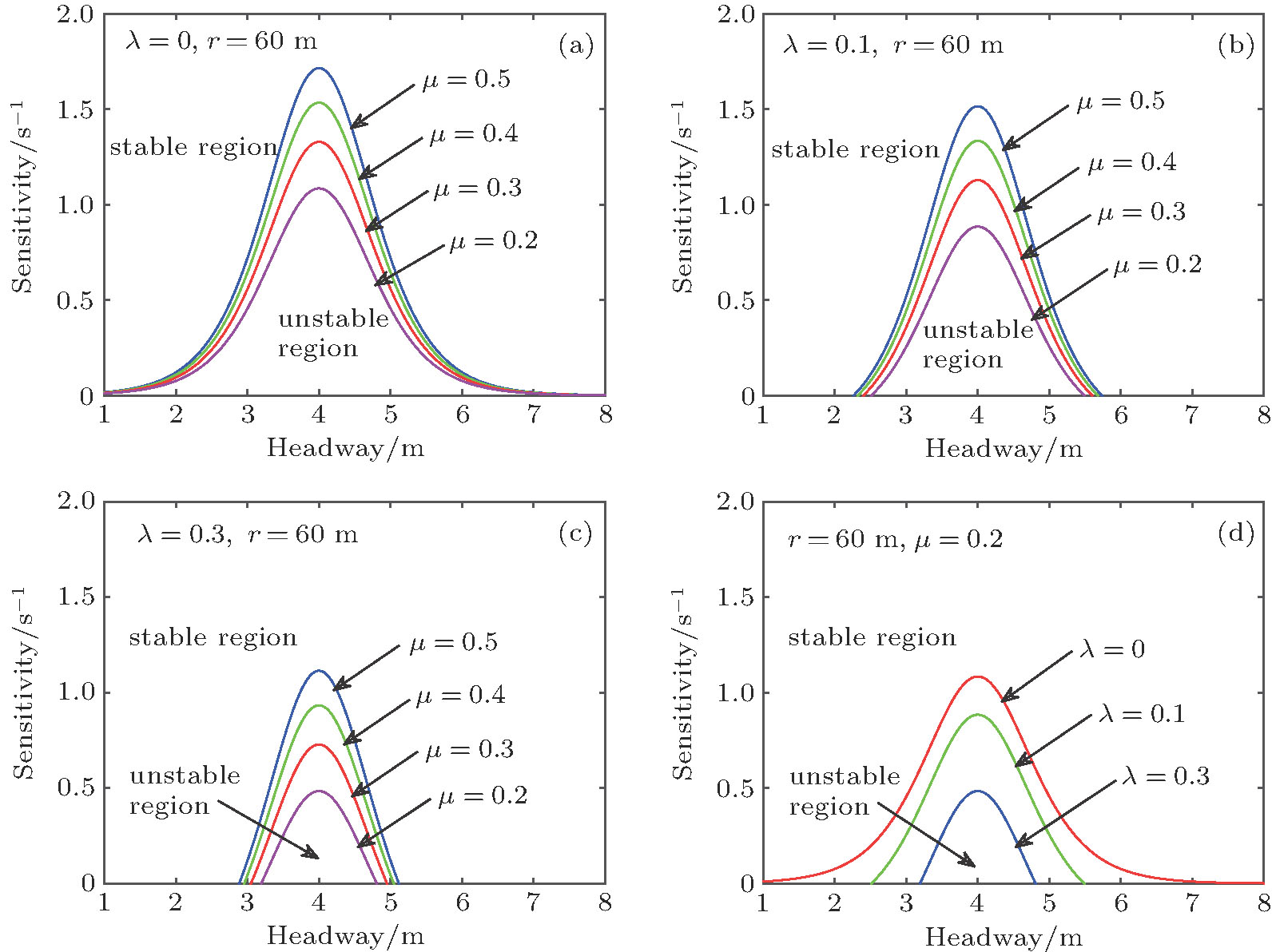 | Fig. 2. (color online) The phase diagram of the model with different parameters λ and μ. |
As we can see from Fig.
3. TDGL equation
In the car-following models, the nonlinear density wave equation is derived to describe the propagation characteristics of traffic congestion. In this part, we adopt the method of nonlinear analysis to investigate the problem. On the coarse grain scale, we describe the traffic flow by using the long wavelength models and then obtain the solution of the equation. The slow changing behavior of long waves near the critical point is analyzed. We assume that τ is very small, then equation (


| Table 1.
The coefficients mj of the model. . |
Now, we consider the traffic flow near critical point 








We define the thermodynamic potentials


4. mKdV equation
Similarly, from the derivation of the TDGL equation, we study the slowly varying behavior at long wavelengths near the critical point. We abstract the slow scale for space variable i and time variable t. By inserting 

| Table 2.
The coefficients ji of the model. . |
In the table, 


If we ignore the 



5. Numerical simulation
In this section, the numerical simulation is carried out for theoretical analysis through the computer. With the periodic boundary condition, the initial conditions are given as follows: 



Figure 
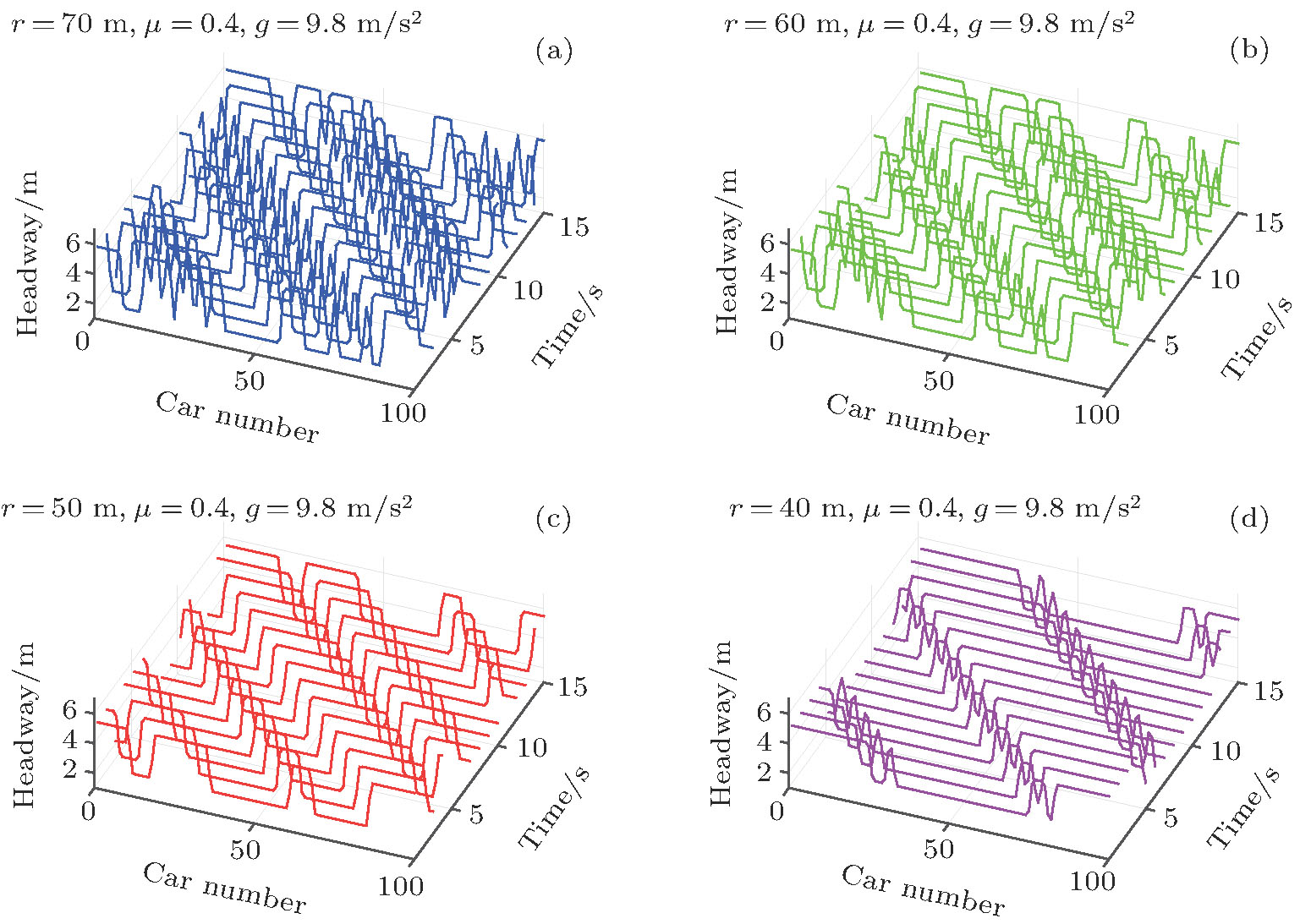 | Fig. 3. (color online) Space–time evolution of the headway after t = 10000 with different r. |
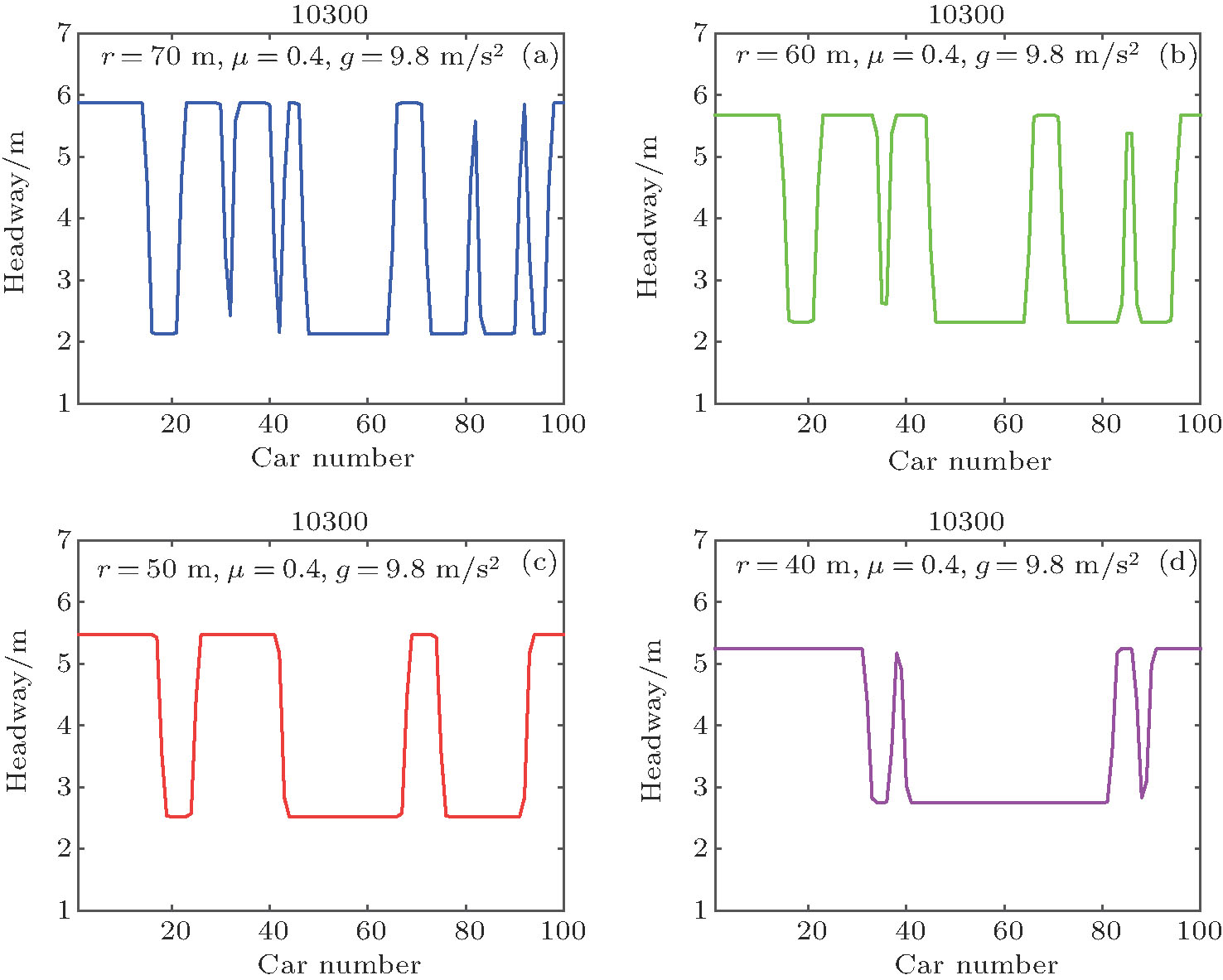
Figure
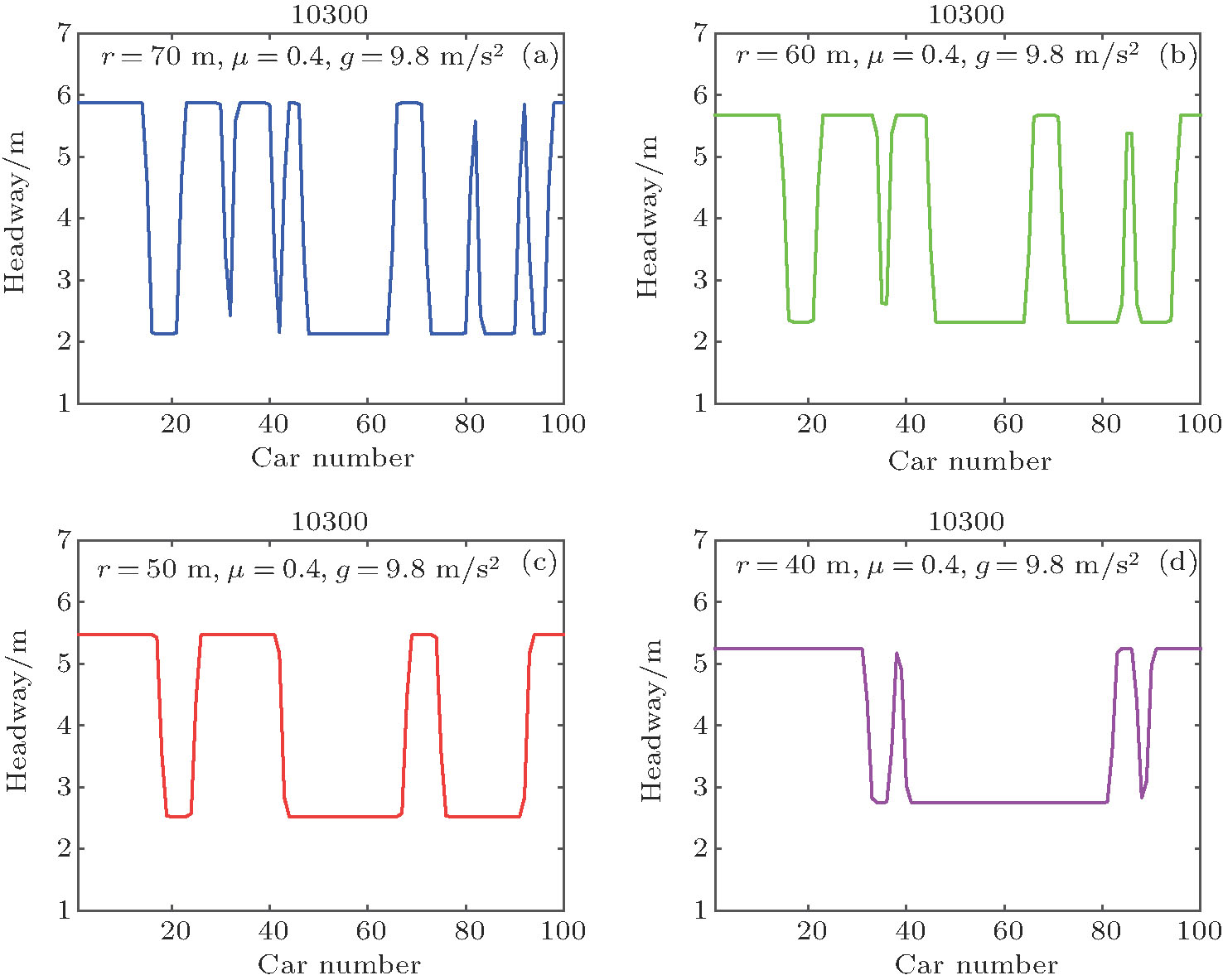 | Fig. 4. (color online) Headway profiles of the density wave at t =10300 corresponding to Fig. |
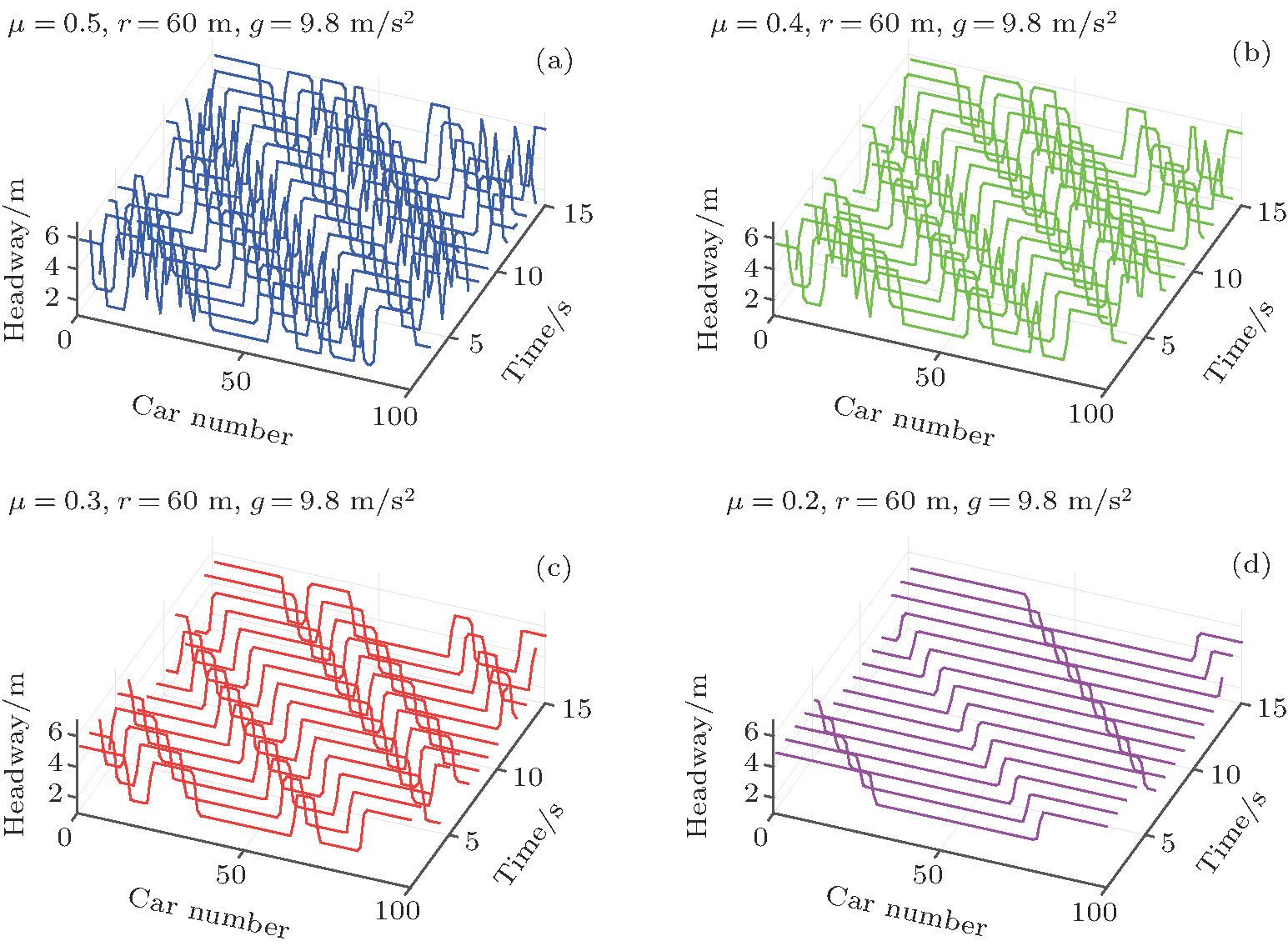
Figure 
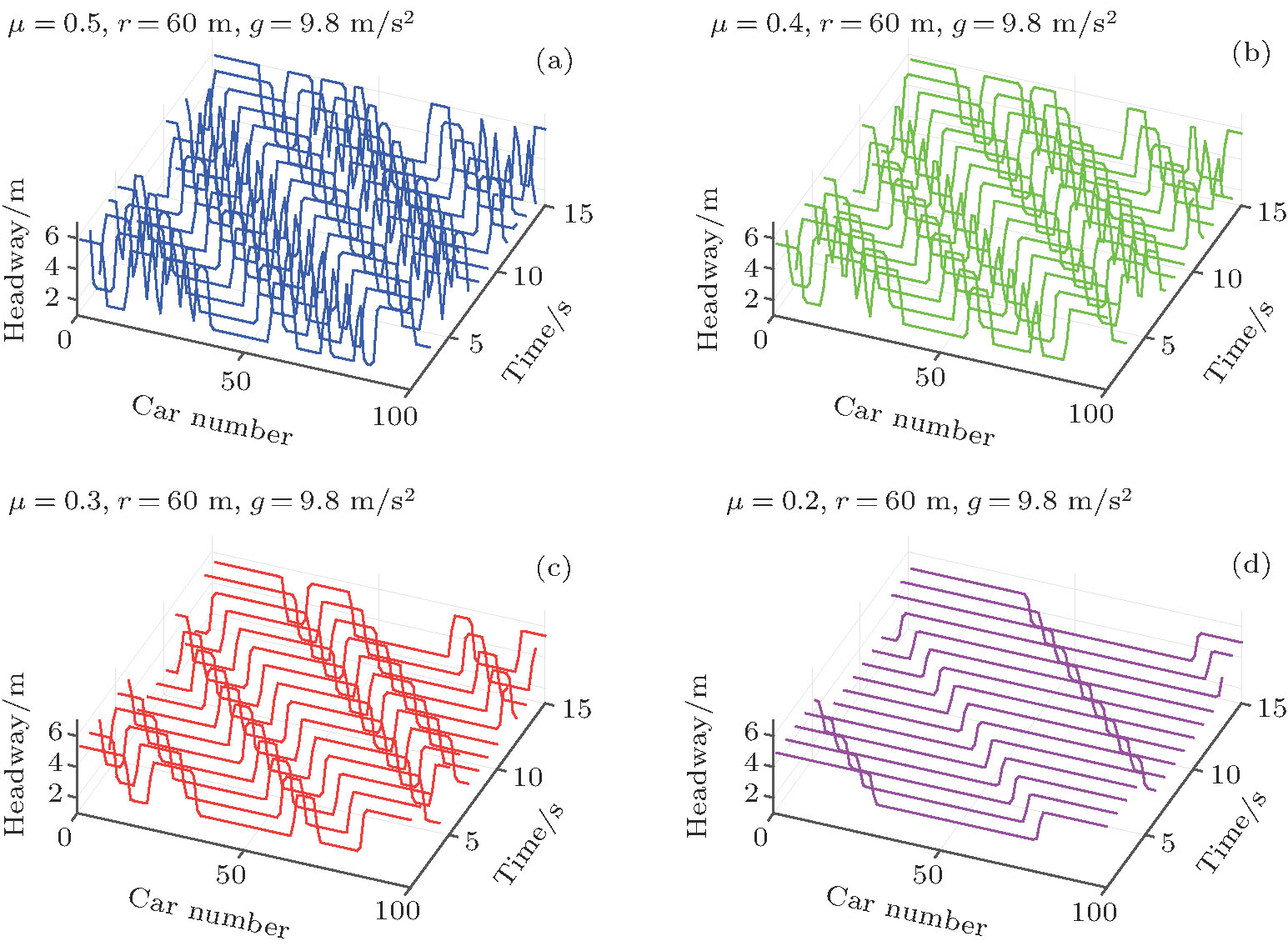 | Fig. 5. (color online) Space–time evolution of the headway after t = 10000 with different μ. |
Figure
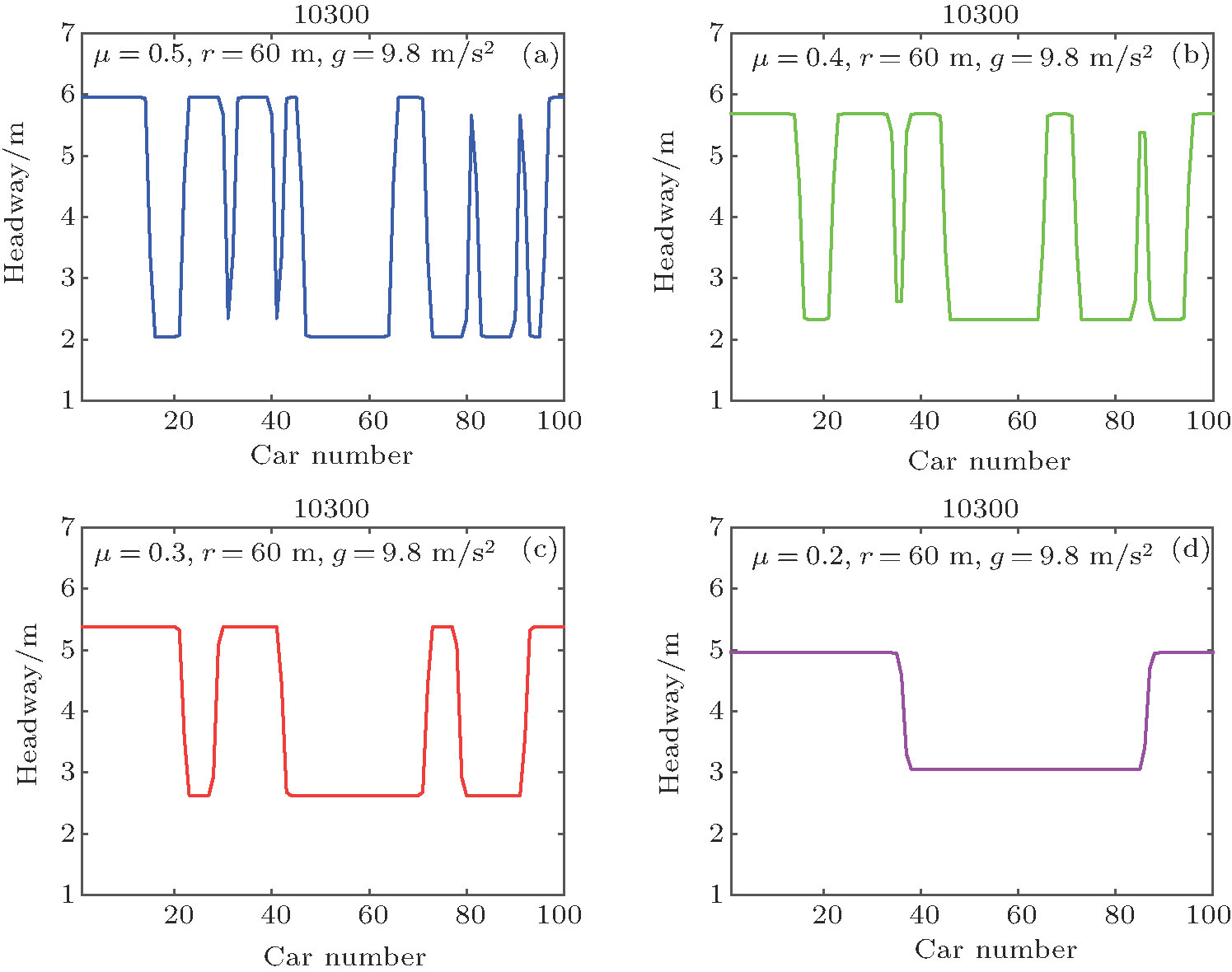 | Fig. 6. (color online) Headway profiles of the density wave at t =10300 corresponding to Fig. |
The stability of the vehicle can be reflected in many aspects; now we analyze from the perspective of energy consumption. We study the relation between the energy consumption and the stability. The change of energy consumption of a vehicle running on a curve depends on parameter λ.
Figure
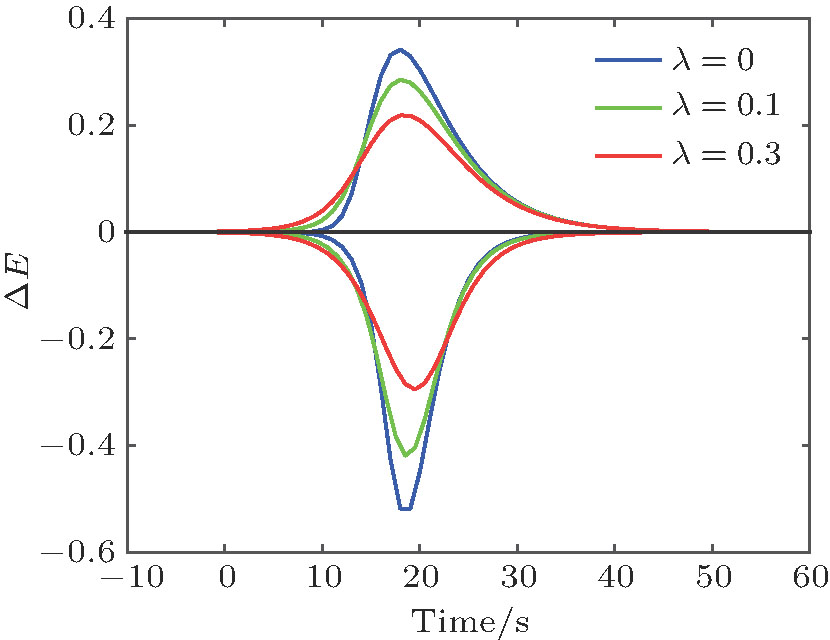 | Fig. 7. (color online) Profile of energy consumption of vehicle with different parameter λ. |
From Fig. 



6. Conclusion
The curved road is very common, so it is important to study the curved road traffic flow. The vehicle on a curved road is affected by many factors. In our model, by means of linear analysis and nonlinear analysis, we study the evolution trend of the traffic flow in a bend and analyze the influence of the friction coefficient and the radius of the curve on the traffic. We also analyze stability from the perspective of energy consumption. The neutral stability line and the critical point are obtained by the linear stability analysis. The TDGL equation has been derived to describe the traffic behavior near the critical point by applying the reductive perturbation method. In addition, the mKdV equation has been derived and we show the relationship between the TDGL and the mKdV equations. Finally, the analytical results are found to be in good agreement with the numerical simulation.
Reference
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 | |
| 21 | |
| 22 | |
| 23 | |
| 24 | |
| 25 | |
| 26 | |
| 27 | |
| 28 | |
| 29 | |
| 30 | |
| 31 | |
| 32 | |
| 33 | |
| 34 | |
| 35 | |
| 36 | |
| 37 | |
| 38 | |
| 39 | |
| 40 | |
| 41 | |
| 42 | |
| 43 | |
| 44 | |
| 45 | |
| 46 | |
| 47 |