{kind=link}
{kind=link}
Nonlocal symmetry and exact solutions of the (2+1)-dimensional modified Bogoyavlenskii–Schiff equation
[Huang Li-Li, Chen Yong†,  ]
]
]
|
|


† Corresponding author. E-mail:
Project supported by the Global Change Research Program of China (Grant No. 2015CB953904), the National Natural Science Foundation of China (Grant Nos. 11275072 and 11435005), the Doctoral Program of Higher Education of China (Grant No. 20120076110024), the Network Information Physics Calculation of Basic Research Innovation Research Group of China (Grant No. 61321064), and the Fund from Shanghai Collaborative Innovation Center of Trustworthy Software for Internet of Things (Grant No. ZF1213).
In this paper, the truncated Painlevé analysis, nonlocal symmetry, Bäcklund transformation of the (2+1)-dimensional modified Bogoyavlenskii–Schiff equation are presented. Then the nonlocal symmetry is localized to the corresponding nonlocal group by the prolonged system. In addition, the (2+1)-dimensional modified Bogoyavlenskii–Schiff is proved consistent Riccati expansion (CRE) solvable. As a result, the soliton–cnoidal wave interaction solutions of the equation are explicitly given, which are difficult to find by other traditional methods. Moreover figures are given out to show the properties of the explicit analytic interaction solutions.
Soliton equations connect rich histories of exactly solvable systems constructed in mathematics, fluid physics, micro-physics, cosmology, field theory, etc. To explain some physical phenomenon further, it becomes more and more important to seek exact solutions and interactions among solutions of nonlinear wave solutions. It is well known that there are many ways to obtain exact solutions of soliton equations, such as the Inverse Scattering transformation (IST),[1] Bäcklund transformation (BT),[2] Darboux transformation (DT),[3,4] Hirota bilinear method,[5] Painlevé method,[6,7] Lie symmetry method,[8–10] and so on. For a given nonlinear system, the Lie symmetry method proposed by Sophus Lie[11,12] during the nineteenth century is a standard method to find the corresponding Lie point symmetry algebras and groups.
The nonlocal symmetries are connected with integrable models and they enlarge the class of symmetries, therefore, to search for nonlocal symmetries of the nonlinear systems is an interesting work. Akhatov and Gazizov[13] provided a method for constructing nonlocal symmetries of differential equations based on the Lie–Bäcklund theory. Galas[14] obtained the nonlocal Lie–Bäcklund symmetries by introducing the pesudo-potentials as an auxiliary system. Guthrie[15] got nonlocal symmetries with the help of a recursion operator. Bluman[16] introduced the concept of potential symmetry for a differential system by writing the given system in a conserved form. Lou et al.[17–19] have made some efforts to obtain infinitely many nonlocal symmetries by inverse recursion operators, the conformal–invariant form (Schwartz form), and Darboux transformation. More recently, Lou, Hu, and Chen[20–22] obtained nonlocal symmetries that were related to the Darboux transformation with the Lax pair and Bäcklund transformation. Xin and Chen[23] gave a systemic method to find the nonlocal symmetry of nonlinear evolution equation and improved previous methods to avoid missing some important results such as integral terms or high-order derivative terms of nonlocal variables in the symmetries. In recent years, it was found that Painlevé analysis can be used to obtain nonlocal symmetries. The type of nonlocal symmetry related to the truncated Painlevé expansion is just the residual of the expansion with respect to singular manifold, and is also called residual symmetry.[24–28] The localization of this type of residual symmetry seems more easily performed than that coming from DT and BT. In order to develop some types of relatively simple and understandable methods to construct exact solutions, Lou proposed a consistent Riccati expansion (CRE) method to identify CRE solvable systems in Ref. [29]. A system is defined to be CRE solvable if it has a CRE. It has been revealed that many similar interaction solutions between a soliton and a cnoidal wave were found in various CRE solvable systems. By this method, recent studies[30–38] have found a lot of interaction solutions in many nonlinear equations.
In the present paper, we focus on investigating the nonlocal symmetry, prolonged system, Bäcklund transformation, CRE solvability, and the exact interaction solutions of the following (2+1)-dimensional modified Bogoyavlenskii–Schiff (mBS) equation[39–43]




It is obvious that if y = x the equation becomes an mKdV equation,


As equation (
This paper is arranged as follows. In Section 2, the non-auto Bäcklund transformation and nonlocal symmetry of the (2+1)-dimensional modified mBS equation are obtained by making use of the truncated Painlevé expansion approach, then the nonlocal symmetry is localized by introducing another three dependent variables and the corresponding nonlocal transformation group is found. In Section 3, the (2+1)-dimensional modified mBS equation is verified to be consistent Riccati expansion solvable and the soliton–cnoidal wave solutions are constructed. The last section contains a summary and discussion.
For the (2+1)-dimensional mBS equation (

Substituting Eq. (

Here, we denote


If we take a special case a = 0, b = c = 1, d = ɛ, then equation (


From the standard truncated Painlevé expansion (
One knows that the symmetry equations for Eq. (


To find out the group of the nonlocal symmetry (


However, since it is difficult to solve Eqs. (

Now the nonlocal symmetry (

Now we have obtained the localized nonlocal symmetries, an interesting question is what kind of finite transformation would correspond to the Lie point symmetry (

Actually, the above group transformation is equivalent to the truncated Painlevé expansion (

Next let us study Lie point symmetries of the prolonged systems instead of the single Eq. (

The symmetries σk (k = u,v,ϕ,f,g,h) are defined as the solution of the linearized equations of the prolonged systems (



Without loss of generality, we assume c1 = c2 = c3 = 0, c4 = 1, f1 = 1/c5,f2 = c6,f3 = c7, and f4 = c8. For simplicity, we introduce 



It is obvious that once the solutions F1 are solved out with Eq. (
For the (2+1)-dimensional mBS equation (





From above discussion, it is shown that equation (
In summary, we have the following theorem:


Obviously, the Riccati equation (

We know the solution (

In order to obtain the solution of Eq. (






It is known that an equation by the definition of the elliptic functions can be written out in terms of Jacobi elliptic functions. The formula (


Hence, one kind of soliton–cnoidal wave solution is obtained by taking Eq. (

The solution given in Eq. (
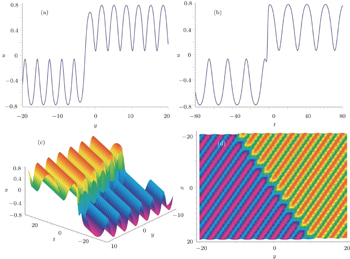
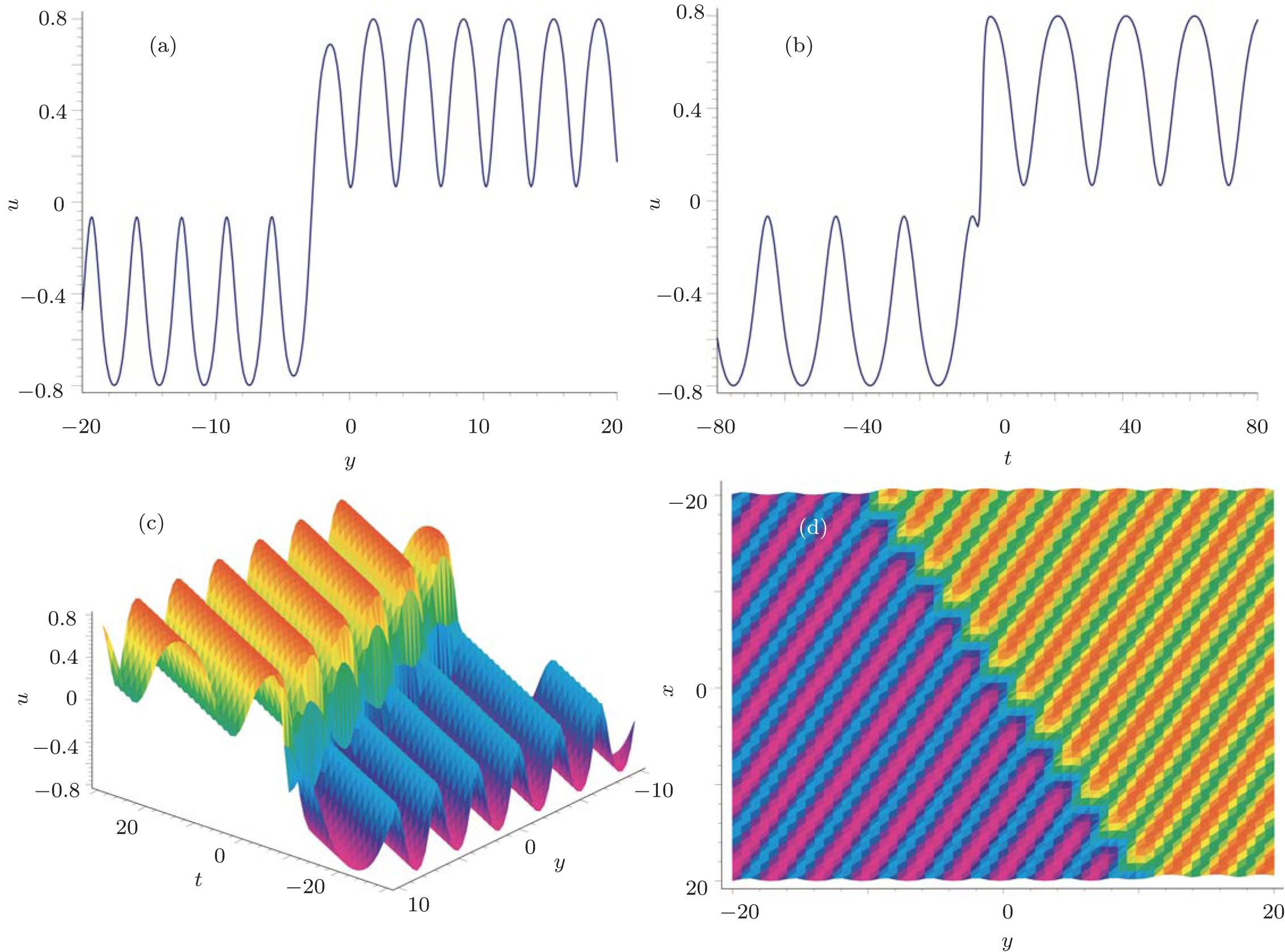 | Fig. 1. The first type of soliton–cnoidal wave interaction solution for u with the parameters m = 1, n = 1/2, k2 = 1, μ0 = 1, and μ1 = 1/4: (a) one-dimensional image at x = 0, t = 2; (b) one-dimensional image at x = 0, y = 2; (c) the three-dimensional plot; (d) overhead view for u at t = 0. |
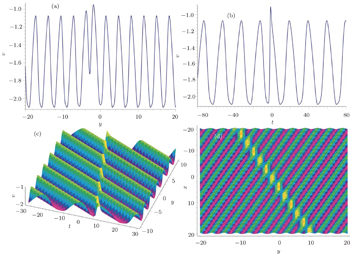
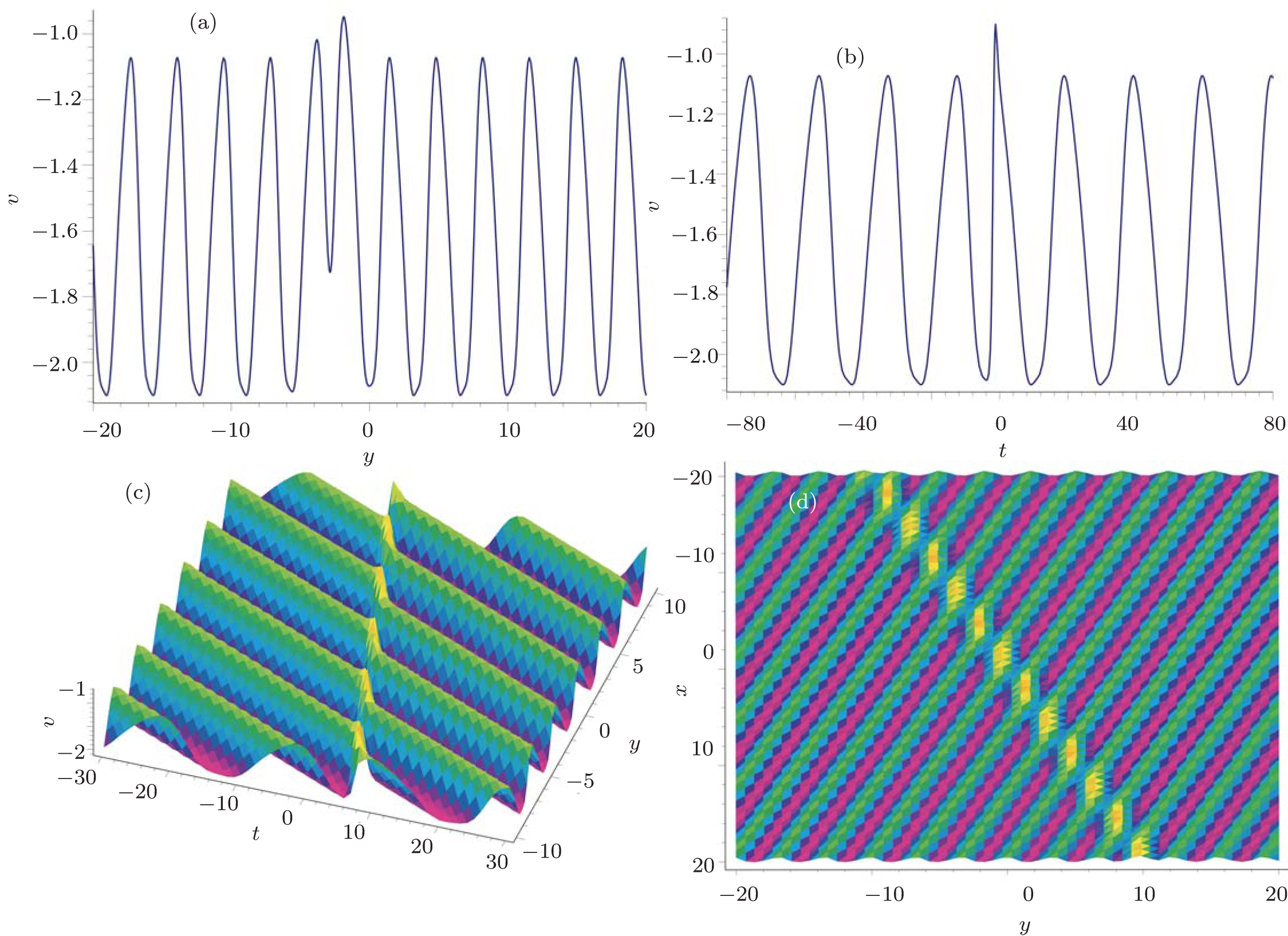 | Fig. 2. The first type of soliton–cnoidal wave interaction solution for v with the parameters m = 1, n = 1/2, k2 = 1, μ0 = 1, and μ1 = 1/4: (a) one-dimensional image at x = 0, t = 2; (b) one-dimensional image at x = 0, y = 2; (c) the three-dimensional plot; (d) overhead view for v at t = 0. |
In summary, the (2+1)-dimensional mBS equation is investigated by using the truncated Painlevé analysis. The nonlocal symmetries, Bäcklund transformations and CRE solvable of the equation are found. Then by means of the CRE method, the soliton–cnoidal wave solutions of the (2+1)-dimensional mBS equation are obtained. By a special form of CRE, i.e., the consistent tanh-function expansion (CTE), kink soliton+cnoidal periodic wave solution and ring soliton+cnoidal periodic wave solution are explicitly expressed by the Jacobi elliptic functions and the corresponding elliptic integral. The interactions between solitons and cnoidal periodic waves display some interesting and physical phenomena. The CRE method used here can be developed to find other kinds of solutions and integrable models. It can also be used to find interaction solutions among different kinds of nonlinear waves. The CRE method did provide us with the result which is quite nontrivial and difficult to be obtained by other traditional approaches.
In addition, the generalized mKdV equation has been investigated in many aspects, but numerical methods relevant to the (2+1)-dimensional mBS equation have been reported little in the current articles. So uncovering more integrable properties of the equation, such as the Darboux transformation, Hamiltonian structure and the conservation, are interesting and meaningful work. The details on the CRE method and other methods to solve interaction solutions among different kinds of nonlinear waves and the investigation of other integrability properties such as Hamiltonian structure and generalized nonlocal symmetry of the (2+1)-dimensional mBS equation deserves further study.
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 | |
| 21 | |
| 22 | |
| 23 | |
| 24 | |
| 25 | |
| 26 | |
| 27 | |
| 28 | |
| 29 | |
| 30 | |
| 31 | |
| 32 | |
| 33 | |
| 34 | |
| 35 | |
| 36 | |
| 37 | |
| 38 | |
| 39 | |
| 40 | |
| 41 | |
| 42 | |
| 43 | |
| 44 | |
| 45 | |
| 46 |